基于大数据的水面漂浮物污染评价系统及其方法
文献发布时间:2023-06-19 09:51:02
技术领域
本发明涉及大数据和水环境技术领域,具体是一种基于大数据的水面漂浮物污染评价系统及其方法。
背景技术
随着人们生活水平的不断提高,人们对于环境保护的意识也在不断的加强,现有的河流污染因素主要为生活污水和工业废水的排放,同时,生活垃圾的丢弃也会直接导致河水的污染,现有河道中的生活垃圾堆积到一定量时,才会对其进行清理,但是,此时已经对河水造成了污染,所以,及时的对河道漂浮物进行检测,及时的进行处理,可以减轻生活垃圾对河道河水的进一步污染,现有的检测大多是采用人为的观察,观察河道水面的漂浮物数量,但是认为的观察不仅仅耗费人力,而且,检测的精度不高,存在人为主观判断,所以,人们急需一种基于大数据的水面漂浮物污染评价系统及其方法来解决上述问题。
发明内容
本发明的目的在于提供一种基于大数据的水面漂浮物污染评价系统及其方法,以解决现有技术中提出的问题。
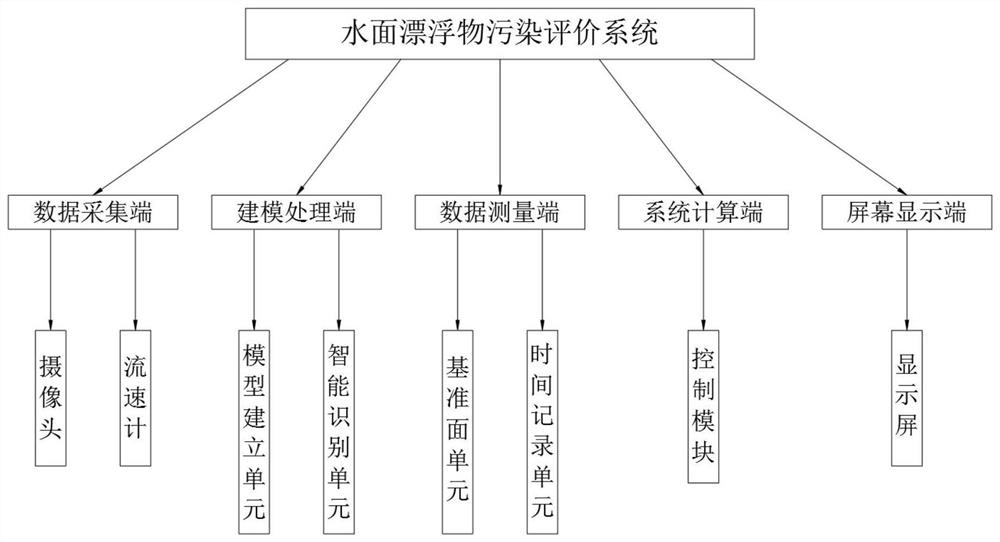
为实现上述目的,本发明提供如下技术方案:一种基于大数据的水面漂浮物污染评价系统,该评价系统包括数据采集端、建模处理端、数据测量端、系统计算端和屏幕显示端;
所述数据采集端的输出端电性连接建模处理端和系统计算端的输入端,所述建模处理端的输出端电性连接数据测量端的输入端,所述数据测量端的输出端电性连接系统计算端的输入端,所述系统计算端的输出端电性连接屏幕显示端的输入端;
所述数据采集端用于对水环境数据进行采集,所述建模处理端用于根据数据采集端采集的水环境数据进行3D建模,所述数据测量端用于对建模之后的3D模型进行数据的测量,所述系统计算端用于对测量的数据进行计算,所述屏幕显示端用于对计算的结果进行显示。
上述各个终端可以的相互配合可以实现对水面漂浮物的监控的测量,有助于对水环境的污染程度进行评价,减少了人力和物力的投入,使得可以及时的做出应对措施,有助于水环境污染的改善。
作为优选技术方案,所述数据采集端包括摄像头和流速计;
所述摄像头的输出端电性连接建模处理端的输入端,所述流速计的输出端电性连接系统计算端的输入端;
所述摄像头用于对河面图像进行摄像采集,使得可以根据采集的图像对河面污染情况进行分析,所述摄像头位于河流堤岸旁,所述流速计用于对河水的流速V进行检测,结合时间T,作为判断漂浮物长度的依据,所述流速计位于河水中。
可以有效的实现对河水数据的采集,减少了认为的观察和采集,节约了人力成本,同时,使得检测数据更加的精确,有助于对河水的污染情况作出更加精准的判断。
作为优选技术方案,所述建模处理端包括模型建立单元和智能识别单元;
所述摄像头的输出端电性连接模型建立单元的输入端,所述智能识别单元的输出端电性连接模型建立单元的输入端;
所述模型建立单元用于将摄像头采集的图像绘制成3D模型,所述模型建立单元可以为3D建模软件,所述智能识别单元用于读取3D模型数据,识别水体3D模型表面连续性的中断点或凸起点,确定为水面漂浮物。
上述单元可以实现水体的3D模型转化,使得可以通过计算机实现对水体表面的观察,更加的直观和清晰,利用智能识别单元自动识别水面中断点或凸起部分,不需要人为观察,提高了识别的精度,同时,有效的提高了识别的速度和效率。
作为优选技术方案,所述智能识别单元还包括模型扫描单元、异常检测单元、数值检测单元和异常判断单元;
所述模型扫描单元的输出端电性连接异常检测单元的输入端,所述异常检测单元的输出端电性连接数值检测单元的输入端,所述数值检测单元的输出端电性连接异常判断单元的输入端;
所述模型扫描单元用于对模型建立单元建立的3D模型表面进行扫描,读取每一个扫描点的三维坐标值,三维坐标值为(X,Y,Z),所述异常检测单元用于对扫描单元扫描读取的三维坐标值差值进行计算,所述数值检测单元用于对计算的数值进行检测,所述异常判断单元用于对检测的数值是否发生了突变进行判断,作为判断水面是否有漂浮物的依据。
上述单元中,实现对3D模型的智能分析,利用对坐标值的差值的计算,可以有效并快速的寻找出突变点,再对突变点做出进一步的判断,可以有效的判断出水面是否出现了漂浮物,提高了系统判断的准确度,降低了判断的误差。
作为优选技术方案,所述数据测量端包括基准面单元和时间记录单元;
所述模型建立单元的输出端电性连接基准面单元的输入端,所述基准面单元的输出端电性连接时间记录单元的输入端;
所述基准面单元用于以3D模型表面连续性面中断点或凸起点的起始点为基准点,建立基准面,所述基准点为顺着水流方向的最前端,所述时间记录单元以基准面确定建立开始,记录时间T
上述单元对漂浮物漂流的时间进行记录,配合流速计测量的水流速度,可以对漂浮物的长度进行计算,可以有效地对漂浮物的大小进行判断,可以实现对水面漂浮物长度的精准计量,不需要人为的对水面漂浮物进行粗略估计,提高了对于水面漂浮物污染评价的准确度。
作为优选技术方案,所述系统计算端包括控制模块;
所述时间记录单元和流速计的输出端电性连接控制模块的输入端;
所述控制模块用于对整个系统进行智能控制,根据公式对数据测量端所量取的数据进行计算,确定漂浮物的长度,所述控制模块可以为可编程控制器;
所述屏幕显示端包括显示屏;
所述控制模块的输出端电性连接显示屏的输入端;
所述显示屏对计算的漂浮物的长度进行显示,计算整个河面的漂浮物单位时间内的长度,根据公式,凭借计算的单位时间的长度对水面漂浮物污染程度的评价进行显示。
一种基于大数据的水面漂浮物污染评价方法,该评价方法包括以下步骤:
S1、利用数据采集端对相关数据进行采集;
S2、利用建模处理端对采集的图像进行3D建模处理;
S3、根据河面3D模型,对漂浮物相关数据进行测量;
S4、根据数据测量端测量的数据和数据采集端采集的数据对漂浮物长度进行计算;
S5、根据计算结果对漂浮物污染程度进行评价并显示。
作为优选技术方案,所述步骤S1-S5中,所述摄像头对河面图像进行采集,所述流速计对河水流速V进行检测,所述模型建立单元将摄像头采集的河面图像转化成3D 模型,所述模型扫描单元对建立的3D模型表面进行扫描,形成每一个扫描点的三维坐标A
作为优选技术方案,所述异常检测单元对相同X轴,单位Y轴变化的Z轴坐标值差值进行计算,根据公式:
其中,Z
当Z
其中,T为漂浮物流过基准面所花费的时长;
根据公式:
其中,V表示水流速度,L
当Z差<H时,表明检测位置无漂浮物,继续对其余三维坐标点进行计算和检测。
作为优选技术方案,所述控制模块对单位时间内的漂浮物总长度进行计算,根据公式:
单位时间内:
当L
当B≤L
当L总<B时,表面水面漂浮物覆盖率小于最小阈值,水体轻微污染。
与现有技术相比,本发明的有益效果是:通过摄像头采集河道水面图像,利用模型建立单元建立河道水体模型,并利用智能识别单元对模型进行扫描和计算,利用公式判断河道水面漂浮物的位置,由于通过相邻两个坐标点的差值进行计算,使得可以准确的判断出河水表面的漂浮物位置,可以有效的提高漂浮物测量的精度,同时,利用基准面单元,可以精准的测量漂浮物的长度,有助于计算水面漂浮物的长度,有助于判断水面漂浮物的数量,有利于及时的得知河道水面漂浮物污染的程度,使得可以及时的对即将严重污染的河道水体进行漂浮物的打捞,可以有效的防止河道水体的进一步污染,有助于对水环境污染的改善。
附图说明
图1为本发明一种基于大数据的水面漂浮物污染评价系统的模块组成示意图;
图2为本发明一种基于大数据的水面漂浮物污染评价系统的模块连接结构示意图;
图3为本发明一种基于大数据的水面漂浮物污染评价系统智能识别单元的模块组成构示意图;
图4为本发明一种基于大数据的水面漂浮物污染评价系统智能识别单元的模块连接示意图;
图5为本发明一种基于大数据的水面漂浮物污染评价方法的步骤示意图;
图6为本发明一种基于大数据的水面漂浮物污染评价方法的流程图;
图7为本发明一种基于大数据的水面漂浮物污染评价方法的河道分布结构示意图;
图8为本发明一种基于大数据的水面漂浮物污染评价方法的坐标轴方向示意图。
图中标号:1、河面;2、漂浮物;3、摄像头;4、基准面;5、流速计。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-2所示,一种基于大数据的水面漂浮物污染评价系统,该评价系统包括数据采集端、建模处理端、数据测量端、系统计算端和屏幕显示端;
所述数据采集端的输出端电性连接建模处理端和系统计算端的输入端,所述建模处理端的输出端电性连接数据测量端的输入端,所述数据测量端的输出端电性连接系统计算端的输入端,所述系统计算端的输出端电性连接屏幕显示端的输入端;
所述数据采集端用于对水环境数据进行采集,所述建模处理端用于根据数据采集端采集的水环境数据进行3D建模,所述数据测量端用于对建模之后的3D模型进行数据的测量,所述系统计算端用于对测量的数据进行计算,所述屏幕显示端用于对计算的结果进行显示。
所述数据采集端包括摄像头3和流速计5;
所述摄像头3的输出端电性连接建模处理端的输入端,所述流速计5的输出端电性连接系统计算端的输入端;
所述摄像头3用于对河面1图像进行摄像采集,使得可以根据采集的图像对河面1污染情况进行分析,所述摄像头3位于河流堤岸旁,所述流速计5用于对河水的流速V进行检测,结合时间T,作为判断漂浮物2长度的依据,所述流速计5位于河水中。
所述建模处理端包括模型建立单元和智能识别单元;
所述摄像头3的输出端电性连接模型建立单元的输入端,所述智能识别单元的输出端电性连接模型建立单元的输入端;
所述模型建立单元用于将摄像头3采集的图像绘制成3D模型,所述模型建立单元可以为3D建模软件,所述智能识别单元用于读取3D模型数据,识别水体3D模型表面连续性的中断点或凸起点,确定为水面漂浮物2。
所述数据测量端包括基准面单元和时间记录单元;
所述模型建立单元的输出端电性连接基准面单元的输入端,所述基准面单元的输出端电性连接时间记录单元的输入端;
所述基准面单元用于以3D模型表面连续性面中断点或凸起点的起始点为基准点,建立基准面4,所述基准点为顺着水流方向的最前端,所述时间记录单元以基准面4确定建立开始,记录时间T
上述单元对漂浮物2漂流的时间进行记录,配合流速计5测量的水流速度,可以对漂浮物2的长度进行计算,可以有效地对漂浮物2的大小进行判断,可以实现对水面漂浮物2长度的精准计量,不需要人为的对水面漂浮物2进行粗略估计,提高了对于水面漂浮物2污染评价的准确度。
所述系统计算端包括控制模块;
所述时间记录单元和流速计5的输出端电性连接控制模块的输入端;
所述控制模块用于对整个系统进行智能控制,根据公式对数据测量端所量取的数据进行计算,确定漂浮物2的长度,所述控制模块可以为可编程控制器;
所述屏幕显示端包括显示屏;
所述控制模块的输出端电性连接显示屏的输入端;
所述显示屏对计算的漂浮物2的长度进行显示,计算整个河面1的漂浮物2单位时间内的长度,根据公式,凭借计算的单位时间的长度对水面漂浮物2污染程度的评价进行显示。
如图3、4、7、8所示,所述智能识别单元还包括模型扫描单元、异常检测单元、数值检测单元和异常判断单元;
所述模型扫描单元的输出端电性连接异常检测单元的输入端,所述异常检测单元的输出端电性连接数值检测单元的输入端,所述数值检测单元的输出端电性连接异常判断单元的输入端;
所述模型扫描单元用于对模型建立单元建立的3D模型表面进行扫描,读取每一个扫描点的三维坐标值,三维坐标值为(X,Y,Z),所述异常检测单元用于对扫描单元扫描读取的三维坐标值差值进行计算,所述数值检测单元用于对计算的数值进行检测,所述异常判断单元用于对检测的数值是否发生了突变进行判断,作为判断水面是否有漂浮物2的依据。
上述单元中,实现对3D模型的智能分析,利用对坐标值的差值的计算,可以有效并快速的寻找出突变点,再对突变点做出进一步的判断,可以有效的判断出水面是否出现了漂浮物2,提高了系统判断的准确度,降低了判断的误差。
如图5-6所示,一种基于大数据的水面漂浮物污染评价方法,该评价方法包括以下步骤:
S1、利用数据采集端对相关数据进行采集;
S2、利用建模处理端对采集的图像进行3D建模处理;
S3、根据河面13D模型,对漂浮物2相关数据进行测量;
S4、根据数据测量端测量的数据和数据采集端采集的数据对漂浮物2长度进行计算;
S5、根据计算结果对漂浮物2污染程度进行评价并显示。
如图7-8所示,所述步骤S1-S5中,所述摄像头3对河面1图像进行采集,所述流速计5对河水流速V进行检测,所述模型建立单元将摄像头3采集的河面1图像转化成3D 模型,所述模型扫描单元对建立的3D模型表面进行扫描,形成每一个扫描点的三维坐标A
所述异常检测单元对相同X轴,单位Y轴变化的Z轴坐标值差值进行计算,根据公式:
其中,Z
当Z
其中,T为漂浮物2流过基准面4所花费的时长;
根据公式:
其中,V表示水流速度,L
当Z差<H时,表明检测位置无漂浮物2,继续对其余三维坐标点进行计算和检测。
所述控制模块对单位时间内的漂浮物2总长度进行计算,根据公式:
单位时间内:
当L
当B≤L
当L总<B时,表面水面漂浮物2覆盖率小于最小阈值,水体轻微污染。
实施例一:
所述摄像头3对河面1图像进行采集,所述流速计5对河水流速V=0.8m/min,所述模型建立单元将摄像头3采集的河面1图像转化成3D 模型,所述模型扫描单元对建立的3D模型表面进行扫描,形成每一个扫描点的三维坐标A
所述异常检测单元对相同X轴,单位Y轴变化的Z轴坐标值差值进行计算,根据公式:
其中,Z
Z
其中,T=35为漂浮物2流过基准面4所花费的时长;
根据公式:
其中,V=0.8m/min表示水流速度,L
所述控制模块对单位时间内的漂浮物2总长度进行计算,根据公式:
1h内:
当L
当B=3m≤L
当L
实施例二:
所述摄像头3对河面1图像进行采集,所述流速计5对河水流速V=0.8m/min,所述模型建立单元将摄像头3采集的河面1图像转化成3D 模型,所述模型扫描单元对建立的3D模型表面进行扫描,形成每一个扫描点的三维坐标A
所述异常检测单元对相同X轴,单位Y轴变化的Z轴坐标值差值进行计算,根据公式:
其中,Z
Z差<H=1,表明检测位置无漂浮物2,继续对其余三维坐标点进行计算和检测。
综上所述,利用该方法可以有效的对水面漂浮的障碍物进行实时监测,可以对水面漂浮的障碍物的总量进行计算,可以对水面漂浮物对水环境污染的程度进行评价,可以及时的对水环境污染情况作出应对。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 基于大数据的水面漂浮物污染评价系统及其方法
- 一种基于大数据的水面漂浮物污染评价系统及其方法