一种化工安全机器人控制系统
文献发布时间:2023-06-19 09:55:50
技术领域
本发明涉及安全机器人技术领域,特别是一种化工安全机器人控制系统。
背景技术
近年来,随着国内劳动力成本上涨,以及时不时出现造成重大人员伤亡的安全生产事故,让制造业用机器人取代人工变得更为迫切,操作机器人得到了极大的发展,但不可避免的,仍然会发生一些安全生产事故,其主要原因在于员工安全意识不足、企业缺乏定期的安全宣传和指导。
因此,急需开发能提供安全巡检、知识普及功能的安全机器人,对工作厂区进行巡检并为员工提供知识宣传。由于该类机器人为巡检式的机器人,因此需对其控制系统进行足够的完善。
发明内容
本发明针对上述问题,从而公开了一种化工安全机器人控制系统。
具体的技术方案如下:
一种化工安全机器人控制系统,其特征在于,包括下位机和上位机;
所述的下位机:为化工安全机器人,接收上位机传达的指令,并将采集的数据传递给上位机;
所述的上位机:控制下位机并接受下位机反馈的数据。
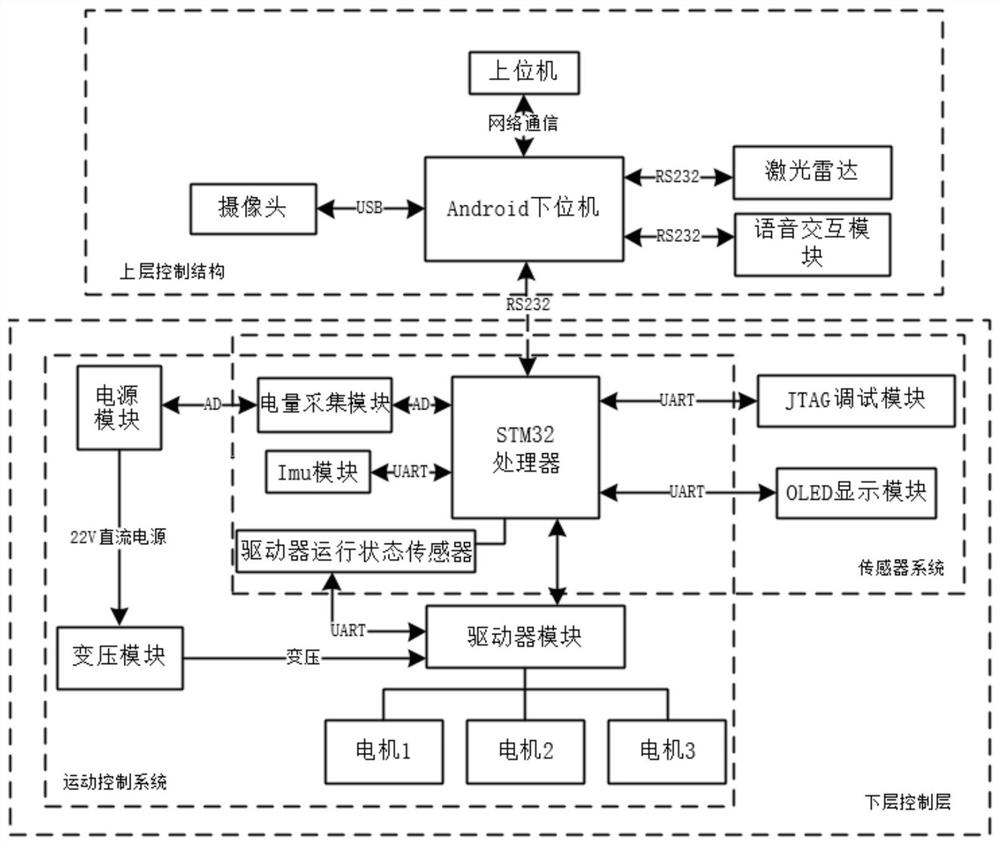
上述的一种化工安全机器人控制系统,其中,所述下位机包括上层控制结构和底层控制结构;
所述上层控制结构以Android系统为核心,用于对摄像头、激光雷达和语音交互模块的数据采集和处理;
所述底层控制结构以STM32处理器为核心,用于机器人运动的闭环控制和传感器的数据采集。
上述的一种化工安全机器人控制系统,其中,所述上层控制结构与底层控制结构通过RS232串口通信。
上述的一种化工安全机器人控制系统,其中,所述底层控制结构包括运动控制系统与传感器采集系统。
上述的一种化工安全机器人控制系统,其中,所述的运动控制系统:包括STM32处理器、驱动器模块、电源模块、变压模块、电量采集模块和IMU模块。
上述的一种化工安全机器人控制系统,其中,所述STM32处理器:选用STM32芯片,通过串口与上层控制结构完成通信,用来接收上层命令,并将指令传递给驱动器模块;所述驱动器模块:选用WSDC2412D双通道直流有刷电机驱动器,降低所需的电压,提高可控效果和系统兼容性能;所述电源模块:选用22V锂电池功能组;所述变压模块选用LM2596T-5V,输出3A的驱动电流;所述电量采集模块:通过AD转换,完成电源模块电量的实时采集;所述IMU模块:选用MPU6050。
上述的一种化工安全机器人控制系统,其中,所述的传感器采集系统:包括STM32处理器、JTAG调试模块、IMU模块、驱动器运行状态传感器、电量采集模块和OLED显示模块。
上述的一种化工安全机器人控制系统,其中,所述STM32处理器:选用STM32芯片,对采集回来的模拟量、数字量进行计算与处理,通过串口与上层控制结构完成通信,执行相关指令;所述JTAG调试模块:用于STM32处理器的在线编程、调试与仿真;所述IMU模块:选用MPU6050;所述驱动器运行状态传感器:为编码器、电流传感器、接近开关中的一种或多种;所述电量采集模块:通过AD转换,完成电源模块电量的实时采集;所述OLED显示模块:用来显示传感器采集系统采集并处理过的信号。
上述的一种化工安全机器人控制系统,其中,所述上层控制结构的工作方法如下:Android系统与摄像头、激光雷达和语音交互模块交互,实现化工安全机器人的画面、导航和音频数据的采集,并通过串口与下层控制层相连接,并经由STM32处理器与驱动底层控制结构中的各硬件设备交互,通过指令驱动硬件设备运行,同时,以化工安全知识库作为支撑,完成对化工安全的培训工作和引览巡检工作。
上述的一种化工安全机器人控制系统,其中,所述底层控制结构的工作方法如下:首先通过STM32处理器对各个模块的进行初始化,然后进入主循环,STM32处理器接收上位机所给出的运动指令,通过运动分析,将指令分配给驱动器模块,驱动器模块根据驱动器运行状态传感器的反馈、以及pid调节器的调节,对驱动器模块的速度进行补偿和调节,并结合IMU所得到的信息判断是否达到目标点;传感器采集系统通过串口和AD转换,采集各模块数据,如电源电量、位移大小、编码器信息等,并最终显示于OLED显示模块上。
本发明的有益效果为:
本发明公开的一种化工安全机器人控制系统,包括下位机和上位机,下位机包括上层控制结构和底层控制结构,底层控制结构包括运动控制系统与传感器采集系统,本发明设计合理,原理简单,不仅能够实现有效实现化工安全机器人的远程操控,且控制系统及通信可靠、稳定;在保证整体可靠、稳定的同时,降低了下位机的成本,提高的数据处理速度、精度和实时性,成本较低,且精度高,通过将化工知识库与服务机器人有机的结合,弥补了服务机器人在化工产业的缺失。
附图说明
图1为本发明示意图。
图2为运动控制系统示意图。
图3为传感器采集系统示意图。
图4为下层控制系统原理图。
具体实施方式
为使本发明的技术方案更加清晰明确,下面结合实施例对本发明进行进一步描述,任何对本发明技术方案的技术特征进行等价替换和常规推理得出的方案均落入本发明保护范围。
实施例一
本实施例的一种化工安全机器人控制系统,其特征在于,包括下位机和上位机;
所述的下位机:为化工安全机器人,接收上位机传达的指令,并将采集的数据传递给上位机;
所述的上位机:控制下位机并接受下位机反馈的数据;
其中,所述下位机包括上层控制结构和底层控制结构;
所述上层控制结构以Android系统为核心,用于对摄像头、激光雷达和语音交互模块的数据采集和处理;
所述底层控制结构以STM32处理器为核心,用于机器人运动的闭环控制和传感器的数据采集;
所述上层控制结构与底层控制结构通过RS232串口通信;
本实施例提供了一种化工安全机器人的控制系统,用于实现化工安全机器人的实时控制。
其工作方法如下:Android系统与摄像头、激光雷达和语音交互模块交互,实现化工安全机器人的画面、导航和音频数据的采集,并通过串口与下层控制层相连接,并经由STM32处理器与驱动底层控制结构中的各硬件设备交互,通过指令驱动硬件设备运行,同时,以化工安全知识库作为支撑,完成对化工安全的培训工作和引览巡检工作。
实施例二
本实施例的一种化工安全机器人控制系统,其特征在于,所述底层控制结构包括运动控制系统与传感器采集系统,所述的运动控制系统:包括STM32处理器、驱动器模块、电源模块、变压模块、电量采集模块和IMU模块;
其中,所述STM32处理器:选用STM32芯片,通过串口与上层控制结构完成通信,用来接收上层命令,并将指令传递给驱动器模块;所述驱动器模块:选用WSDC2412D双通道直流有刷电机驱动器,降低所需的电压,提高可控效果和系统兼容性能;所述电源模块:选用22V锂电池功能组;所述变压模块选用LM2596T-5V,输出3A的驱动电流;所述电量采集模块:通过AD转换,完成电源模块电量的实时采集;所述IMU模块:选用MPU6050。
实施例三
本实施例的一种化工安全机器人控制系统,其特征在于,所述的传感器采集系统:包括STM32处理器、JTAG调试模块、IMU模块、驱动器运行状态传感器、电量采集模块和OLED显示模块;
其中,所述STM32处理器:选用STM32芯片,对采集回来的模拟量、数字量进行计算与处理,通过串口与上层控制结构完成通信,执行相关指令;所述JTAG调试模块:用于STM32处理器的在线编程、调试与仿真;所述IMU模块:选用MPU6050;所述驱动器运行状态传感器:为编码器、电流传感器、接近开关中的一种或多种;所述电量采集模块:通过AD转换,完成电源模块电量的实时采集;所述OLED显示模块:用来显示传感器采集系统采集并处理过的信号。
实施例四
如实施例二和三所述的一种化工安全机器人控制系统,其特征在于,所述底层控制结构的工作方法如下:首先通过STM32处理器对各个模块的进行初始化,然后进入主循环,STM32处理器接收上位机所给出的运动指令,通过运动分析,将指令分配给驱动器模块,驱动器模块根据驱动器运行状态传感器的反馈、以及pid调节器的调节,对驱动器模块的速度进行补偿和调节,并结合IMU所得到的信息判断是否达到目标点;传感器采集系统通过串口和AD转换,采集各模块数据,如电源电量、位移大小、编码器信息等,并最终显示于OLED显示模块上。
实施例五
综合上述实施例所述,本化工安全机器人控制系统的工作流程如下:
(1)上位机与下位机通过网络局域网通信,用于发送指令,以及接收下位机传回的信息,完成化工安全培训和引导的目的;
(2)下位机处理接收到的指令,将接收到的指令通过STM32处理器传递给运动控制系统和传感器采集系统,同时调用摄像头、激光雷达和语音交互模块,对相应数据进行采集与处理;
(3)运动控制系统处理接受到的指令,实现对机器人全方位自主移动的精确控制;传感器采集系统处理接收到的指令并完成,同时将信息反馈到上层控制层;
(4)下位机处理接收到的反馈信息并传至上位机,等待下一步指令。
综上所述,本发明设计合理,原理简单,不仅能够实现有效实现化工安全机器人的远程操控,且控制系统及通信可靠、稳定;在保证整体可靠、稳定的同时,降低了下位机的成本,提高的数据处理速度、精度和实时性,成本较低,且精度高,通过将化工知识库与服务机器人有机的结合,弥补了服务机器人在化工产业的缺失。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围内。因此,本发明的保护范围应该以权利要求书的保护范围为准。
- 一种化工安全机器人控制系统
- 一种工业机器人安全控制系统及备份安全电路、安全模块