一种3D车载玻璃曝光视觉定位方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明属于视觉定位技术领域,具体涉及一种3D车载玻璃曝光视觉定位方法。
背景技术
随着车载内饰的发展,许多高配车型中控台区域使用LED显示各种辅助信息,这就使得中控台区域的玻璃材质工艺非常高,玻璃上要求各种图案配合LED背光显示效果,从而使得车载玻璃的视觉效果较好,便于司机和乘客的使用和观看。
现有的车载玻璃通过设备吸盘安装于车载曝光机上的,在紧固之前使用打千分尺来确保玻璃载具的两个靠山与设备的坐标系角度接近0,为了在产品曝光过程中,图形不会因为玻璃载具安装存在角度而发生旋转,另外机构增加多个位置挡片来锁定产品的位置,但是在实际调试中发现这种方案不仅换线耗时长,客户体验差,而且由于玻璃物料尺寸差异很难满足客户的精度要求,导致产品展示效果较差,降低了视觉效果的问题,为此我们提出一种3D车载玻璃曝光视觉定位方法。
发明内容
本发明的目的在于提供一种3D车载玻璃曝光视觉定位方法,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种3D车载玻璃曝光视觉定位方法,
步骤一:确定车载玻璃产品,并将车载玻璃产品进行色彩填充,使得车载玻璃产品区域处于色彩凸出区域,基于车载玻璃产品确定视觉抓边位置;
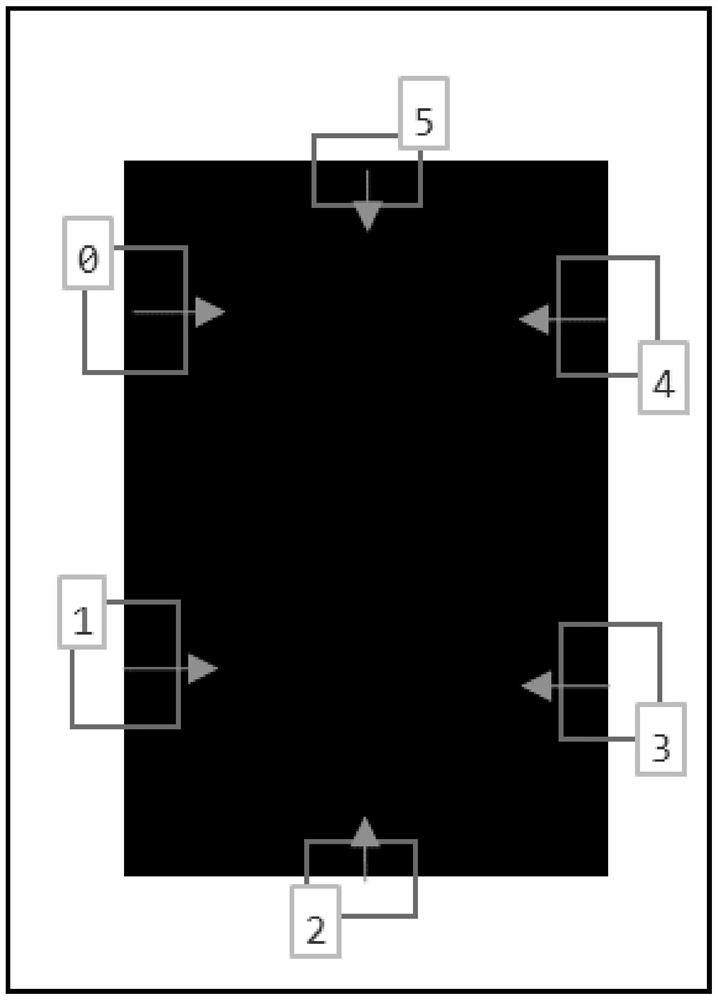
步骤二:所述步骤一中视觉抓边位置通过矩形框表示,所述矩形框区域共六个,矩形框代号依次为:0号、1号、2号、3号、4号、5号,同时基于视觉抓边区域建立中线坐标(x,y);
步骤三:基本中线坐标、0号矩形框、1号矩形框确定直线L
步骤四:基于2号矩形框、5号矩形框分别向L
步骤五:通过直线L
步骤六:通过步骤四中两个垂足的中心点计算出车载产品的中心位置;
步骤七:通过多矩形框组成一个刚体变换矩阵,利用软件通过抓边结果来拟合出产品中心位置及角度,所述软件所用算法为
步骤八:通过对准模块将车载玻璃产品进行精准定位。
优选的,所述车载玻璃产品的填充色彩为黑色。
优选的,六个所述矩形框均位于车载玻璃产品上,且六个所述矩形框以车载玻璃的中心线对称分布。
优选的,所述步骤八中对准模块包括八个按钮:
开始按钮,用于将方法启动,使得整个视觉定位开始执行;
转到捕获Pos按钮,通过用户进行数值定义,确保对准模块按规律进行执行;
CCD捕获图像,基于CCD捕获图像使得捕获的图像数据精准和稳定,其次捕获所用时间小于两秒;
计算第一边缘位置,确定出车载玻璃产品的横向边缘位置;
计算第一边缘位置,确定出车载玻璃产品的纵向边缘位置;
获取网格矩阵,利用网格将车载玻璃产品进一步定位和确定位置;
开始曝光,用于将车载玻璃产品进行曝光;
终点,用于对方法进行关闭。
优选的,所述两个垂足分别为C
优选的,所述设备开始曝光前,依次计算出六个矩形框的区域坐标。
与现有技术相比,本发明的有益效果是:
通过使用CCD增加对位计算来代替单纯靠机械定位的方法,有效的提高了车载玻璃的视觉效果,减少了换线时长,使得客户的体验感较好,同时对车载玻璃载具的安装降低要求,另外曝光图形的位置精度也有明显提升,提高了工作效率,使得车载玻璃的展示效果较好。
附图说明
图1为本发明的结构示意图;
图2为本发明的结构示意图;
图3为本发明的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1至图3,本发明提供一种技术方案:一种3D车载玻璃曝光视觉定位方法,
步骤一:确定车载玻璃产品,并将车载玻璃产品进行色彩填充,使得车载玻璃产品区域处于色彩凸出区域,基于车载玻璃产品确定视觉抓边位置;
步骤二:步骤一中视觉抓边位置通过矩形框表示,矩形框区域共六个,矩形框代号依次为:0号、1号、2号、3号、4号、5号,同时基于视觉抓边区域建立中线坐标(x,y);
步骤三:基本中线坐标、0号矩形框、1号矩形框确定直线L
步骤四:基于2号矩形框、5号矩形框分别向L
步骤五:通过直线L
步骤六:通过步骤四中两个垂足的中心点计算出车载产品的中心位置;
步骤七:通过多矩形框组成一个刚体变换矩阵,利用软件通过抓边结果来拟合出产品中心位置及角度,软件所用算法为
步骤八:通过对准模块将车载玻璃产品进行精准定位。
本实施例中,优选的,车载玻璃产品的填充色彩为黑色。
本实施例中,优选的,六个矩形框均位于车载玻璃产品上,且六个矩形框以车载玻璃的中心线对称分布。
本实施例中,优选的,步骤八中对准模块包括八个按钮:
开始按钮,用于将方法启动,使得整个视觉定位开始执行;
转到捕获Pos按钮,通过用户进行数值定义,确保对准模块按规律进行执行;
CCD捕获图像,基于CCD捕获图像使得捕获的图像数据精准和稳定,其次捕获所用时间小于两秒;
计算第一边缘位置,确定出车载玻璃产品的横向边缘位置;
计算第一边缘位置,确定出车载玻璃产品的纵向边缘位置;
获取网格矩阵,利用网格将车载玻璃产品进一步定位和确定位置;
开始曝光,用于将车载玻璃产品进行曝光;
终点,用于对方法进行关闭。
本实施例中,优选的,两个垂足分别为C
本实施例中,优选的,设备开始曝光前,依次计算出六个矩形框的区域坐标。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
以上所述,仅用以说明本发明的技术方案而非限制,本领域普通技术人员对本发明的技术方案所做的其它修改或者等同替换,只要不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
- 一种3D车载玻璃曝光视觉定位方法
- 一种车载3D玻璃显示盖板磨边磨头及其磨边方法