一种用于机场行李的搬运机器人及其控制方法
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及机场行李搬运技术领域,特别是涉及一种用于机场行李的搬运机器人及其控制方法。
背景技术
机场亦被称为飞机场、空港,其较正式的名称是航空站。机场有不同的大小,除了跑道之外,机场通常还设有塔台、停机坪、航空客运站、维修厂等设施,并提供机场管制服务、空中交通管制等其他服务。
另一方面,近年来,随着我国经济的迅速发展,乘坐飞机由于比较便捷高效,这种出行方式越来越受到人们的青睐。然而,随着旅客运输量的逐年持续增长,尤其是国际航线旅客的持续增长,与此同时,旅客的主要目的是旅游或出国学习,随身携带的行李数量也随之增加,增大了行李周转量。现有技术中采用人力逐次搬运单个行李,存在如下缺陷:劳动强度大、工作效率低、工作质量差,例如暴力搬运行李,造成行李外形或者内部的损坏。市场上也有搬运机器人,但是存在如下缺点:无法同时存放多件行李,也不能灵活的根据乘客需求相对应的取出行李,不具备自动弹出的功能,乘客取出行李比较费力。
发明内容
鉴于以上所述现有技术的缺点,本发明的目的在于提供一种用于机场行李的搬运机器人,用于解决现有技术的搬运机器人中无法同时存放多件行李,也不能灵活的根据乘客需求相对应的取出行李,不具备自动弹出的功能,乘客取出行李比较费力的问题。
为实现上述目的及其他相关目的,本发明提供一种用于机场行李的搬运机器人,包括:机壳、置物件、盖合机构和锁定机构,所述置物件转动设置在机壳的右侧内壁上,所述锁定机构设置在机壳的左侧外壁上,所述锁定机构用于锁定置物件,并使得置物件保持在水平状态,所述盖合机构转动设置在机壳的左侧顶端上;
所述置物件转动设置在所述机壳的右侧内壁上,所述置物件包括第一置物板、第二置物板和第三置物板,所述第二置物板的两端分别和第一置物板、第三置物板转动连接;
所述锁定机构设置在机壳的左侧外壁和第三置物板的左端之间,所述锁定机构能够锁定住第三置物板,并使得第一置物板、第二置物板和第三置物板位于同一个水平面内;
所述盖合机构包括盖板、多个侧挡件、第一分流件和第二分流件,所述盖板的底端和机壳的左侧顶端转动连接,多个所述侧挡件分别设置在盖板的顶面两端上,所述第一分流件转动设置在盖板的顶面顶端上,所述第二分流件固定设置在盖板的顶面底端上。
优选的,所述机壳包括左侧板、右侧板和底板,所述左侧板、右侧板分别固定在底板的顶面两端上,所述机壳的内部设有分隔板,所述分隔板把机壳的内部分隔成前放置腔和后放置腔。
优选的,所述盖板的底端安装有旋转驱动件,所述旋转驱动件的输出轴贯穿盖板并和第一分流件的底端连接,所述旋转驱动件能够带动第一分流件在盖板的顶面摆动。
优选的,所述锁定机构包括锁定通槽、锁定块、锁定伸缩件、锁定插板,所述锁定通槽开设在左侧板上,所述锁定块固定在左侧板的外壁上,所述锁定伸缩件竖直设置在锁定块上,所述锁定插板转动设置在第三置物板的左端上,所述锁定插板上开设有锁定插孔,当所述锁定插板贯穿插入锁定通槽内时,所述锁定伸缩件的底端能够插入到锁定插孔内。
优选的,所述置物件的数量为两个,两个所述置物件在机壳的内部从下至上分布,所述机壳的内部被两个置物件依次分隔成下腔室、中腔室和上腔室,所述下腔室、中腔室和上腔室的容纳空间依次减小。
优选的,所述盖板的顶面底端开设有安装槽,所述安装槽内转动设有两个导辊,所述导辊的转轴上设有齿轮,所述齿轮位于两个导辊之间,所述盖板的底面设有第一安装壳,所述安装壳的内部滑动设有齿条,所述齿轮和齿条互相啮合,所述齿条的底端设有压杆,所述安装壳的底端设有触发开关,所述齿条的底端和安装壳的底端之间设有第一复位件,当第一复位件位于初始状态时,所述压杆的底端按压住触发开关。
优选的,所述置物件的前端设有阻挡部,所述阻挡部用于阻挡行李从置物件的顶面上意外滑落,所述分隔板的前后两侧均设有弹出机构,所述弹出机构用于把行李从机壳的内部向外弹出。
优选的,所述阻挡部包括第二安装壳、浮动块、阻挡板、第二复位件和电磁开关,所述第二安装壳安装在置物件的前端上,所述浮动块活动设置在第二安装壳内,所述阻挡板固定在浮动块的顶端上,所述电磁开关固定在第二安装壳的内底面上,所述第二复位件设置在阻挡板和第二安装壳的内底面之间,当第二复位件位于初始长度时,所述阻挡板的顶端高于置物件的顶面。
优选的,所述弹出机构包括充气泵、气管、第一气囊、第二气囊和第三气囊,所述充气泵安装在右侧板的外侧,所述第一气囊、第二气囊和第三气囊均设置在分隔板上,所述第一气囊对应上腔室分布,所述第二气囊对应中腔室分布,所述第三气囊对应下腔室分布,所述充气泵通过气管和第一气囊、第二气囊、第三气囊互相连通,所述第一气囊的右端设有第一阀门,所述第二气囊的右端设有第二阀门,所述第三气囊的右端设有第三阀门。
此外,本发明还提供了一种用于机场行李的搬运机器人的控制方法:
语音播放作业:当行李沿着盖板向下滑动时,行李带动导辊旋转,所述导辊通过齿条带动压杆脱离触发开关,此时,控制模块控制语音播放模块来播放语音,以提醒乘客第一次录入指纹;
第一指纹录入作业:乘客听到语音提醒后,把手指贴合住第一指纹录入模块,以记录乘客的指纹,使得乘客指纹和行李一一对应;
摄像作业:控制模块启动摄像头,以拍摄机壳内的行李放置情况,并把行李的位置信息传输到控制模块内,使得行李和行李的放置位置一一对应;
分流作业:当前放置腔放满行李后,控制模块控制旋转驱动件,旋转驱动件的输出轴带动第一分流件摆动,从而把行李分流到后放置腔内;
第二指纹录入作业:当行李被运送到预定位置后,控制模块控制语音播放模块来播放语音,以提醒乘客第二次录入指纹;
撤销阻挡作业:控制模块控制电磁开关开启,电磁开关吸附住浮动块向下移动,浮动块带动阻挡板向下移动,并使得阻挡板的顶面低于置物件的顶面;
行李弹出作业:当乘客第二次录入指纹后,控制模块启动充气泵,同时,控制模块根据乘客的指纹、行李位置信息来开启第一阀门、第二阀门或第三阀门,以实现行李的对应弹出。
如上所述,本发明的用于机场行李的搬运机器人,至少具有以下有益效果:
一、使用时,通过锁定机构来锁定住置物件的左端,分隔板和多个置物件把机壳的内部分隔成前放置腔、后放置腔、下腔室、中腔室和上腔室,可以同时在前放置腔、后放置腔、下腔室、中腔室和上腔室分别放置多个行李,使得一次性能够搬运多个行李,降低劳动强度、提高工作效率、提高工作质量,例如避免暴力搬运行李。由于前放置腔、后放置腔、下腔室、中腔室和上腔室均有一侧是开口设置的,能够根据乘客需求灵活相对应的取出行李。
二、当乘客需要取出行李时,启动充气泵,充气泵内产生的气体进入到气管内,气体使得第一气囊、第二气囊、第三气囊鼓起,第一气囊、第二气囊、第三气囊鼓起并向外弹出行李,辅助乘客取出行李,节省乘客取出行李所需要的力气。
三、在乘客放入行李时需要录入指纹,在乘客取出行李时也需要录入指纹,否则会发出报警声音,使得乘客只能取出自己的行李,此外,还有摄像头全程摄像,避免发生行李取错的情况。
附图说明
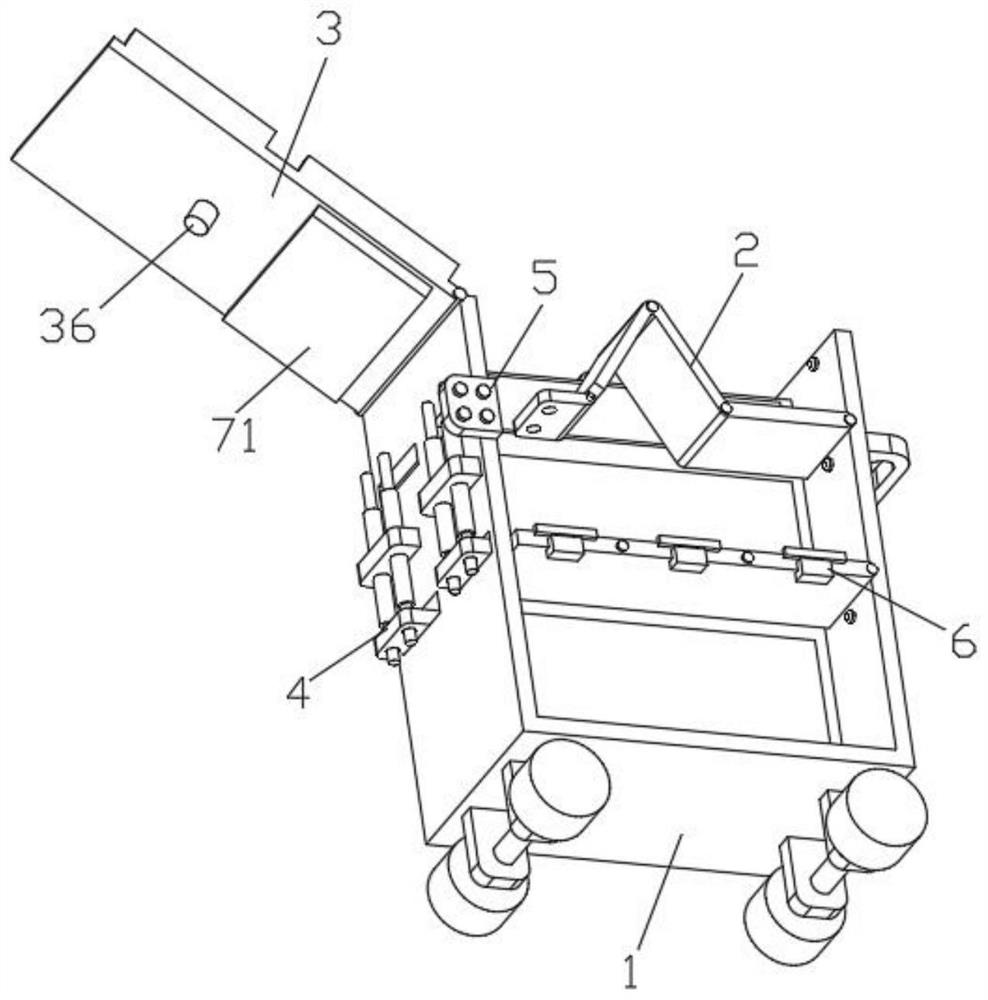
图1显示为本发明的用于机场行李的搬运机器人的立体示意图。
图2显示为本发明的用于机场行李的搬运机器人的立体示意图(另一视角)。
图3显示为本发明的用于机场行李的搬运机器人的主视图。
图4显示为本发明的用于机场行李的搬运机器人中锁定机构的立体图。
图5显示为本发明的用于机场行李的搬运机器人中盖合机构的立体图。
图6显示为本发明的用于机场行李的搬运机器人中置物件的立体图。
图7显示为本发明的用于机场行李的搬运机器人中弹出机构的示意图。
图8显示为本发明的用于机场行李的搬运机器人中第一安装壳的内部剖视图。
图9显示为本发明的用于机场行李的搬运机器人中阻挡部的剖视图。
图10显示为本发明的用于机场行李的搬运机器人中的框图。
元件标号说明:机壳1、分隔板11、置物件2、第一置物板21、第二置物板22、第三置物板23、盖合机构3、盖板31、侧挡件32、第一分流件33、第二分流件34、导辊35、旋转驱动件36、锁定机构4、锁定通槽41、锁定块42、锁定伸缩件43、锁定插板44、锁定插孔441、控制面板5、阻挡部6、第二安装壳61、浮动块62、阻挡板63、第二复位件64、电磁开关65、第一安装壳71、齿条72、压杆73、第一复位件74、触发开关75、齿轮76、弹出机构8、充气泵81、气管82、第一气囊83、第二气囊84、第三气囊85、第一阀门86、第二阀门87、第三阀门88。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
请参阅图1至图10。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
以下各个实施例仅是为了举例说明。各个实施例之间,可以进行组合,其不仅仅限于以下单个实施例展现的内容。
请参阅图1-3,本发明提供一种用于机场行李的搬运机器人,包括:机壳1、置物件2、盖合机构3和锁定机构4,置物件2转动设置在机壳1的右侧内壁上,使用时,把行李放置在置物件2的顶面上,锁定机构4设置在机壳1的左侧外壁上,锁定机构4用于锁定置物件2的左端,并使得置物件2保持在水平状态上,盖合机构3转动设置在机壳1的左侧顶端上,使用时,通过盖合机构3把行李导入到机壳1的内部。其中,机壳1的底端设有行走机构,具体而言,行走机构包括四个行走轮和行走电机(图中未示出),行走电机安装在机壳1的底端上,四个行走轮通过横轴转动设置在机壳1的底端两侧上,行走电机的输出轴和横轴之间设有锥齿轮组,当启动行走电机时,行走电机的输出轴旋转通过锥齿轮组带动横轴旋转,横轴带动四个行走轮转动,从而改变机壳1的位置,便于搬运行李。
请参阅图1-3,机壳1包括左侧板、右侧板和底板,左侧板、右侧板分别固定在底板的顶面两端上,其中,底板水平分布,左侧板、右侧板均为竖直分布,左侧板、右侧板和底板之间均采用焊接固定,以增加连接强度,机壳1的内部设有分隔板11,分隔板11把机壳1的内部分隔成前放置腔和后放置腔,其中,分隔板11竖直分布,分隔板11位于机壳1的中心线上,分隔板11的底端和底板固定连接,分隔板11的两端分别和左侧板、右侧板的内壁固定连接。置物件2转动设置在机壳1的右侧内壁上,其中,置物件2的右端通过转轴或铰链和机壳1的右侧内壁转动连接,具体而言,请参阅图6,置物件2包括第一置物板21、第二置物板22和第三置物板23,第二置物板22的两端分别和第一置物板21、第三置物板23转动连接,使得置物件2能够被折叠起来,便于向下放入行李,其中,第二置物板22位于第一置物板21和第三置物板23之间。置物件2的数量为两个,两个置物件2在机壳1的内部从下至上分布,机壳1的内部被两个置物件2依次分隔成下腔室、中腔室和上腔室,下腔室、中腔室和上腔室的容纳空间依次减小。
使用时,可以分别在前放置腔、后放置腔、下腔室、中腔室和上腔室的内部放置行李,使得一次性能够搬运多个行李,降低劳动强度、提高工作效率、提高工作质量,例如避免暴力搬运行李。由于前放置腔、后放置腔、下腔室、中腔室和上腔室均有一侧是开口设置的,能够根据乘客需求灵活相对应的取出行李。具体的,先收卷两个置物件2,以把行李放入到机壳1的内底部,当机壳1的内底部放满行李后,展开下方的置物件2至水平状态,并通过锁定机构4锁定住下方的置物件2的左端,然后把行李放置到下方的置物件2的顶面上,待下方的置物件2的顶面放满行李时,再展开上方的置物件2至水平状态,并通过锁定机构4锁定住上方的置物件2的左端,然后把行李放置到上方的置物件2的顶面上,如此可以在机壳1的内部同时放置多个行李。
请参阅图1-3,锁定机构4设置在机壳1的左侧外壁和第三置物板23的左端之间,锁定机构4能够锁定住第三置物板23的左端,并使得第一置物板21、第二置物板22和第三置物板23位于同一个水平面内,以便于在第一置物板21、第二置物板22和第三置物板23的顶面上放置乘客的行李,确保行李在第一置物板21、第二置物板22和第三置物板23的顶面上能够稳定的放置。请参阅图4、6,具体而言,锁定机构4包括锁定通槽41、锁定块42、锁定伸缩件43和锁定插板44,锁定通槽41开设在左侧板上,其中,锁定通槽41的横截面采用长方形结构,且锁定通槽41沿着水平方向分布,锁定块42固定在左侧板的外壁上,锁定块42为长条形结构,锁定块42和左侧板的外壁之间采用焊接固定,锁定伸缩件43竖直设置在锁定块42上,其中,锁定伸缩件43采用液压伸缩杆或气动推杆,锁定插板44转动设置在第三置物板23的左端上,其中,锁定插板44的右端和第三置物板23的左端之间通过转轴转动连接在一起,锁定插板44上开设有锁定插孔441,其中,锁定插孔441的横截面采用圆形结构,当锁定插板44贯穿插入到锁定通槽41内时,锁定伸缩件43的底端能够插入到锁定插孔441内。
使用时,展开第一置物板21、第二置物板22和第三置物板23,并使得三者位于同一个水平面内,然后把锁定插板44贯穿插入到锁定通槽41内,此时,锁定插孔441向外露出于锁定通槽41,启动并伸长锁定伸缩件43,锁定伸缩件43的底端向下伸长并插入到锁定插孔441内,由于左侧板挡住锁定伸缩件43,从而把锁定插板44锁定在锁定通槽41内,使得第一置物板21、第二置物板22和第三置物板23始终处于同一个水平面内,从而便于在置物件2的顶面上放置行李。优选的,锁定伸缩件43采用两个,锁定插孔441也采用两个,可以提高锁定插板44被锁定的力度,确保稳定的使用。
请参阅图1、5,盖合机构3包括盖板31、多个侧挡件32、第一分流件33和第二分流件34,盖板31的底端和机壳1的左侧顶端转动连接,其中,盖板31采用板状结构,盖板31的长度等于左侧板和右侧板之间的距离,多个侧挡件32分别设置在盖板31的顶面两端上,其中,侧挡件32采用长条板体,侧挡件32和盖板31之间为焊接固定,第一分流件33转动设置在盖板31的顶面顶端上,第二分流件34固定设置在盖板31的顶面底端上,其中,第一分流件33、第二分流件34均采用长条板,第一分流件33的长度大于盖板31的前后宽度距离,确保第一分流件33的自由端能够搭在侧挡件32上,使得第一分流件33和另一个侧挡件32之间形成夹角,利于行李的分流导入。此外,盖板31的底端安装有旋转驱动件36,旋转驱动件36采用慢速电机,旋转驱动件36的输出轴贯穿盖板31并和第一分流件33的底端连接,旋转驱动件36能够带动第一分流件33在盖板31的顶面摆动。
使用时,先旋转打开盖板31,使得盖板31和机壳1的顶端之间形成夹角,并把盖板31的顶端搭在输送带上,此时,盖板31倾斜向下分布,以利于把行李导入到机壳1内,具体的,启动旋转驱动件36,旋转驱动件36的输出轴旋转带动第一分流件33摆动,第一分流件33的顶端在盖板31的顶端摆动,当第一分流件33的自由端搭在侧挡件32上时,关闭旋转驱动件36,并让第一分流件33稳定的搭在侧挡件32上,此时,第一分流件33和另一个侧挡件32之间形成夹角,行李在第一分流件33和另一个侧挡件32之间沿着夹角向下滑动,从而把行李导入到前放置腔内,当前放置腔放满行李后,再次启动旋转驱动件36,旋转驱动件36的输出轴反方向旋转,同理使得第一分流件33的自由端搭在另一个侧挡件32上,以便于把行李放入到后放置腔内,从而实现行李的分流放置,也利于在机壳1内同时放置多个行李。
请参阅图5、8,盖板31的顶面底端开设有安装槽,安装槽内转动设有两个导辊35,导辊35的转轴上设有齿轮76,齿轮76位于两个导辊35之间,其中,导辊35的顶面高于盖板31的顶面,确保行李向下滑落时,行李的底面能够带动导辊35旋转。盖板31的底面设有第一安装壳71,其中,第一安装壳71和盖板31的底面之间采用焊接固定,第一安装壳71采用长方体壳型结构,安装壳71的内部滑动设有齿条72,其中,齿条72的底面设有滑块,安装壳71的内底面上开设有滑槽,滑块滑动设置在滑槽内,齿条72沿着第一安装壳71的长度方向分布,齿轮76和齿条72互相啮合,齿条72的底端设有压杆73,安装壳71的底端设有触发开关75,齿条72的底端和安装壳71的底端之间设有第一复位件74,当第一复位件74位于初始状态时,压杆73的底端按压住触发开关75,其中,第一复位件74采用矩形螺旋弹簧。
当行李在盖板31的顶面向下滑落时,行李的底面接触挤压住导辊35的顶面,使得导辊35绕其转轴发生向下旋转,从而转轴带动齿轮76发生旋转,齿轮76带动齿条72在第一安装壳71内向上滑动,齿条72的底端带动压杆73向上移动,并使得压杆73的底端脱离触发开关75,同时,第一复位件74被拉伸边长,当前一个行李滑落完毕后,在第一复位件74弹性力的作用下,齿条72带动压杆73向下移动,压杆73的底端再次按压触发开关75,齿条72带动齿轮76发生向上旋转,齿轮76带动与其同轴的导辊35向上旋转以恢复到初始位置,从而便于下一个行李的向下滑落。
请参阅图1-3,置物件2的前端设有阻挡部6,阻挡部6用于阻挡行李从置物件2的顶面上意外滑落,其中,阻挡部6的数量为三个,三个阻挡部6分别对应第一置物板21、第二置物板22、第三置物板23分布,以阻挡住第一置物板21、第二置物板22、第三置物板23上的行李,分隔板11的前后两侧均设有弹出机构8,弹出机构8用于把行李从机壳1的内部向外弹出,从而辅助乘客取出行李。具体而言,请参阅图9,阻挡部6包括第二安装壳61、浮动块62、阻挡板63、第二复位件64和电磁开关65,第二安装壳61固定安装在置物件2的前端上,浮动块62活动设置在第二安装壳61内,其中,浮动块62采用长方体块状结构,阻挡板63固定在浮动块62的顶端上,其中,阻挡板63采用长条板,且长条板水平分布,电磁开关65固定在第二安装壳61的内底面上,第二复位件64设置在阻挡板63和第二安装壳61的内底面之间,当第二复位件64位于初始长度时,阻挡板63的顶端高于置物件2的顶面,其中,第二复位件64采用矩形螺旋弹簧。
使用时,关闭电磁开关65,在第二复位件64的弹力作用下,第二复位件64向上推动阻挡板63,并使阻挡板63的顶端高于置物件2的顶面,从而阻挡住置物件2顶面的行李,避免行李意外滑落,确保安全使用,当需要取出行李时,启动电磁开关65,电磁开关65产生磁力并向下吸附浮动块62,浮动块62带动阻挡板63向下移动,并使得阻挡板63的顶端低于置物件2的顶面,从而便于从置物件2的顶面取出行李,此时,第二复位件64被压缩变短,储备弹性势能,以利于下次关闭电磁开关65时,第二复位件64能够向上伸长,推动阻挡板63向上移动。
请参阅图7,弹出机构8包括充气泵81、气管82、第一气囊83、第二气囊84和第三气囊85,充气泵81固定安装在右侧板的外侧,其中,充气泵81和右侧板之间通过螺栓可拆卸的安装,以便于更换及维修充气泵81,第一气囊83、第二气囊84和第三气囊85均设置在分隔板11上,第一气囊83对应上腔室分布,第二气囊84对应中腔室分布,第三气囊85对应下腔室分布,其中,第一气囊83、第二气囊84和第三气囊85的体积依次增大,充气泵81通过气管82和第一气囊83、第二气囊84、第三气囊85互相连通,第一气囊83的右端设有第一阀门86,第二气囊84的右端设有第二阀门87,第三气囊85的右端设有第三阀门88。
当乘客需要从置物件2的顶面上取出行李时,启动充气泵81,充气泵81内产生的气体进入到气管82内,气体使得第一气囊83、第二气囊84、第三气囊85鼓起,第一气囊83、第二气囊84、第三气囊85鼓起并向外推出行李,辅助乘客取出行李,节省乘客取出行李所需要的力气。
请参阅图1、10,还包括控制面板5,控制面板5的内部设有控制模块,控制面板5上设有语音播放模块、第一指纹录入模块和第二指纹录入模块,机壳1的内侧设有摄像头,控制模块和语音播放模块、第一指纹录入模块、第二指纹录入模块、摄像头、触发开关、充气泵、旋转驱动件、电磁开关、第一阀门、第二阀门、第三阀门之间均采用电性连接。能够实现全程自动化控制,便于使用,此外,还有摄像头全程摄像,避免发生行李取错的情况,也可以在乘客取错行李后调出视频录像,从而追踪行李的去向。此外,控制面板5内还设有导航模块,导航模块和行走电机电性连接,导航模块用于控制机壳1自动行走到预定的位置,自动化作业,便捷高效。
此外,本发明还提供了一种用于机场行李的搬运机器人的控制方法:
语音播放作业:当行李沿着盖板31向下滑动时,行李带动导辊35旋转,所述导辊35通过齿条72带动压杆73脱离触发开关75,此时,控制模块控制语音播放模块来播放语音,以提醒乘客第一次录入指纹;
第一指纹录入作业:乘客听到语音提醒后,把手指贴合住第一指纹录入模块,以记录乘客的指纹,使得乘客指纹和行李一一对应;
摄像作业:控制模块启动摄像头,以拍摄机壳1内的行李放置情况,并把行李的位置信息传输到控制模块内,使得行李和行李的放置位置一一对应;
分流作业:当前放置腔放满行李后,控制模块控制旋转驱动件36,旋转驱动件36的输出轴带动第一分流件33摆动,从而把行李分流到后放置腔内;
第二指纹录入作业:当行李被运送到预定位置后,控制模块控制语音播放模块来播放语音,以提醒乘客第二次录入指纹;
撤销阻挡作业:控制模块控制电磁开关65开启,电磁开关65吸附住浮动块62向下移动,浮动块62带动阻挡板63向下移动,并使得阻挡板63的顶面低于置物件2的顶面;
行李弹出作业:当乘客第二次录入指纹后,控制模块启动充气泵81,同时,控制模块根据乘客的指纹、行李位置信息来开启第一阀门83、第二阀门84或第三阀门85,以实现行李的对应弹出。
综上所述,本发明使用时,通过锁定机构来锁定住置物件的左端,分隔板和多个置物件把机壳的内部分隔成前放置腔、后放置腔、下腔室、中腔室和上腔室,可以同时在前放置腔、后放置腔、下腔室、中腔室和上腔室分别放置多个行李,使得一次性能够搬运多个行李,降低劳动强度、提高工作效率、提高工作质量,例如避免暴力搬运行李。由于前放置腔、后放置腔、下腔室、中腔室和上腔室均有一侧是开口设置的,能够根据乘客需求灵活相对应的取出行李;当乘客需要取出行李时,启动充气泵,充气泵内产生的气体进入到气管内,气体使得第一气囊、第二气囊、第三气囊鼓起,第一气囊、第二气囊、第三气囊鼓起并向外弹出行李,辅助乘客取出行李,节省乘客取出行李所需要的力气;在乘客放入行李时需要录入指纹,在乘客取出行李时也需要录入指纹,否则会发出报警声音,使得乘客只能取出自己的行李,此外,还有摄像头全程摄像,避免发生行李取错的情况。所以,本发明有效克服了现有技术中的种种缺点而具高度产业利用价值。
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
- 一种用于机场行李的搬运机器人及其控制方法
- 一种用于机场行李集装箱搬运的AGV及搬运方法