一种基于运动捕捉的放疗手术系统
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及一种放疗手术系统,特别是一种结合动作捕捉设备的放疗手术系统。
背景技术
粒子植入近距离放疗是将放射性粒子通过穿刺针植入肿瘤中,通过衰变产生的射线杀死癌细胞。目前该技术已经投入临床治疗。由于其能够合理控制辐射剂量、手术创口小等特点,在多种癌症治疗方案中较有优势,采用粒子植入近距离放疗手术方案能够获得较高的手术成功率和较小的复发率。但是,在目前的应用中,该手术方案有依赖医生手术经验、植入位置存在误差等问题,由于手术过程需多次使用CT、并且植入粒子本身带有辐射,医生在粒子植入手术过程中承受的辐射剂量较大。
为防止医生在粒子植入手术过程中承受辐射的问题,现有技术中采用遥操作技术,在保证精准传递医生手臂动作的前提下,可将医生隔离到远离辐射的环境;但是目前的手术机器人大多采用主从式方案,大部分是针对腹腔镜手术的通用手术机器人系统,现有主从式机器人操作系统中,多采用通用式主手机构,一方面,受到主手机构本身结构的限制,医生进行操作时需要配合主手机构的工作空间、运动方式等进行动作,医生手部的运动和手术所需动作在使用主手机构时存在变形,医生工作空间受限,影响医生手臂运动行程,医生所做动作和手术操作动作不符,不符合操作直觉;另一方面,医生对主手机构操作的过程中,除双手进行手术操作运动外,还需进行脚踏、眼动等额外控制操作,共同协作才能使机器人系统理解医生控制意图进行操作,这对医生带来较大的操作负担;因此,以上问题亟需解决。
发明内容
本发明目的是为了解决现有主从式机器人操作系统使用时需身体各部位协同配合共同操作,操作负担重;且操作系统的主手机构由于自身结构限制,影响操作人员手臂运动行程的问题;本发明提供了一种基于运动捕捉的放疗手术系统。
一种基于运动捕捉的放疗手术系统,包括位于操作室的动作捕捉系统1、上位机2和手持工具3,以及位于手术室的手术机械臂4和视觉采集器5;
视觉采集器5,用于采集患者7待手术区域的图像,并上传至上位机2进行显示;
动作捕捉系统1包括多个动作捕捉镜头1-1和多个红外靶球;
在操作者6的大臂、前臂、手背、以及手中的手持工具3,共4个部位上均粘贴有红外靶球,且每个部位上至少有3个红外靶球;
所有的动作捕捉镜头1-1均匀布设在操作者6周围,用于实时采集操作者6操作手臂上的4个部位上的红外靶球的图像,并上传至上位机2;
上位机2对接收的红外靶球的图像进行处理,获得每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置生成控制指令对手术机械臂4进行控制。
优选的是,上位机2对接收的红外靶球的图像进行处理,获得每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置生成控制指令对手术机械臂4进行控制的实现方式为:
上位机2从所接收的红外靶球的图像中提取每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置解算出当前时刻4个部位质心的位置和姿态;再根据当前时刻4个部位质心的位置和姿态,生成控制指令对手术机械臂4进行控制。
优选的是,上位机2根据当前时刻4个部位质心的位置和姿态,生成控制指令对手术机械臂4进行控制的实现方式为:
上位机2对当前时刻和上一时刻下的每个部位质心的位置进行运算,获得当前时刻各部位质心的速度、角速度、加速度和角加速度后,采用模仿学习算法对当前时刻各部位质心的位置、姿态、速度、角速度、加速度和角加速度进行动作特征提取,再根据提取的操作者6动作特征生成当前时刻相应的控制指令对手术机械臂4进行控制;
其中,每个部位质心位置的初始值均为预设值。
优选的是,上位机2对当前时刻和上一时刻下的每个部位质心的位置进行运算,获得当前时刻各部位质心的速度、角速度、加速度和角加速度的实现方式为:
上位机2对当前时刻和上一时刻下的每个部位质心的位置进行微分运算,获得当前时刻每个部位质心的速度和加速度,同时,上位机2还通过欧拉角微分方程对当前时刻和上一时刻下的每个部位质心的位置进行运算,获得当前时刻每个部位质心的角速度、角加速度。
优选的是,动作捕捉镜头1-1为红外相机。
本发明带来的有益效果是,本发明提出的一种基于运动捕捉的放疗手术系统,一方面,可根据采集的红外靶球的图像直接提取操作者手臂的运动信息,操作者做出的动作的运动行程不受空间限制,所做动作和手术操作相符、符合操作直觉,提高对手术机械臂4的控制精度。另一方面,由于动作捕捉系统1的视场完全覆盖操作者手臂运动区域,因此,可直接提取操作者手臂的全部运动信息,无需脚部、眼部进行额外配合操作,简化动作,可以降低手术操作难度和操作疲劳度。
本发明所述的一种基于运动捕捉的放疗手术系统主要应用在放疗手术中,避免操作者在粒子植入手术过程中承受辐射风险。
附图说明
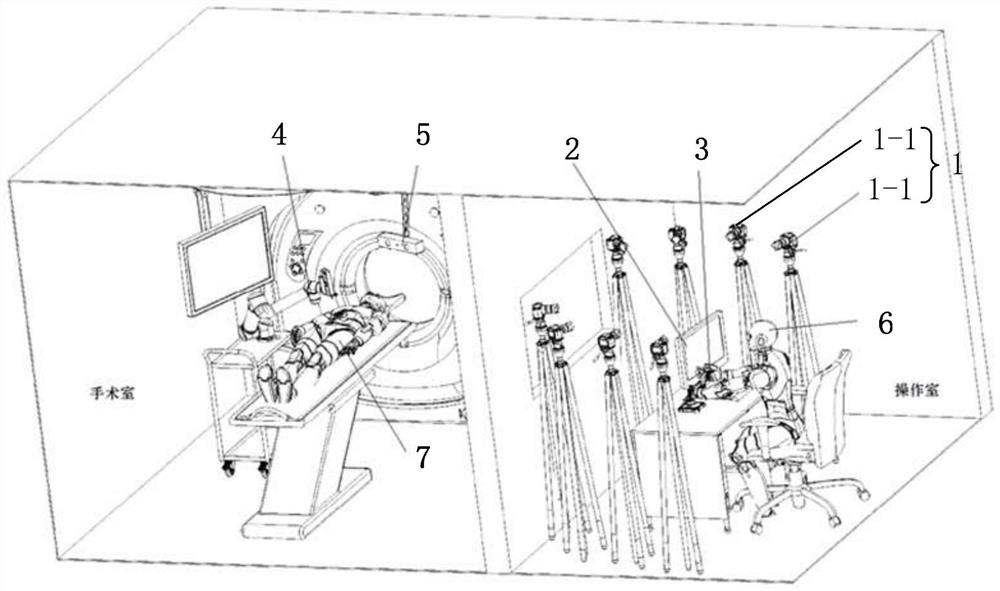
图1是本发明所述一种基于运动捕捉的放疗手术系统的原理示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
参见图1说明本实施方式,本实施方式所述的一种基于运动捕捉的放疗手术系统,包括位于操作室的动作捕捉系统1、上位机2和手持工具3,以及位于手术室的手术机械臂4和视觉采集器5;
视觉采集器5,用于采集患者7待手术区域的图像,并上传至上位机2进行显示;
动作捕捉系统1包括多个动作捕捉镜头1-1和多个红外靶球;
在操作者6的大臂、前臂、手背、以及手中的手持工具3,共4个部位上均粘贴有红外靶球,且每个部位上至少有3个红外靶球;
所有的动作捕捉镜头1-1均匀布设在操作者6周围,用于实时采集操作者6操作手臂上的4个部位上的红外靶球的图像,并上传至上位机2;
上位机2对接收的红外靶球的图像进行处理,获得每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置生成控制指令对手术机械臂4进行控制。
具体应用时,通过视觉采集器5采集待手术区域的图像,操作者6根据该待手术区域的图像做出相应的动作,从而控制手术机械臂4做相应动作,在操作者6的在操作空间中布置动作捕捉镜头1-1,确保动作捕捉镜头1-1的视场能够包括操作者6操作手臂的动作范围。在使用之前,对动作捕捉镜头1-1进行标定,更新动作捕捉镜头1-1相对位置参数。再在操作者6的大臂、前臂、手背、以及手持工具3,共4个部位上均粘贴有至少3个红外靶球。使用过程中,视觉采集器5获取手术室中手术部位的实时图像,依据图像反馈、手术机械臂4末端位置,操作者6进行相应的手术动作。在动作过程中,动作捕捉镜头1-1获取所有靶球的实时位置,上位机2根据每个部位上所有红外靶球的空间位置生成控制指令对手术机械臂4进行控制。
本实施方式所提出的一种基于运动捕捉的放疗手术系统,一方面,可根据采集的红外靶球的图像直接提取操作者手臂的运动信息,操作者做出的动作的运动行程不受空间限制,所做动作和手术操作相符、符合操作直觉,提高对手术机械臂4的控制精度。另一方面,由于动作捕捉系统1的视场完全覆盖操作者手臂运动区域,因此,可直接提取操作者手臂的全部运动信息,无需脚部、眼部进行额外配合操作,简化动作,可以降低手术操作难度和操作疲劳度。
进一步的,具体参见图1,上位机2对接收的红外靶球的图像进行处理,获得每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置生成控制指令对手术机械臂4进行控制的实现方式为:
上位机2从所接收的红外靶球的图像中提取每个部位上所有红外靶球的空间位置,并根据每个部位上所有红外靶球的空间位置解算出当前时刻4个部位质心的位置和姿态;再根据当前时刻4个部位质心的位置和姿态,生成控制指令对手术机械臂4进行控制。
更进一步的,具体参见图1,上位机2根据当前时刻4个部位质心的位置和姿态,生成控制指令对手术机械臂4进行控制的实现方式为:
上位机2对当前时刻和上一时刻下的每个部位质心的位置进行运算,获得当前时刻各部位质心的速度、角速度、加速度和角加速度后,采用模仿学习算法对当前时刻各部位质心的位置、姿态、速度、角速度、加速度和角加速度进行动作特征提取,再根据提取的操作者6动作特征生成当前时刻相应的控制指令对手术机械臂4进行控制;
其中,每个部位质心位置的初始值均为预设值。
本实施方式中,上位机2中加载模仿学习算法,通过模仿学习算法能够进行操作者6动作的特征提取,从而实时生成对手术机械臂4进行控制的控制指令,其中,模仿学习算法是一种现有算法,可以得到平滑、运动特性好、安全性高的控制指令发布给手术机械臂4,并对手术机械臂4的高精度运动控制。
更进一步的,具体参见图1,上位机2对当前时刻和上一时刻下的每个部位质心的位置进行运算,获得当前时刻各部位质心的速度、角速度、加速度和角加速度的实现方式为:
上位机2对当前时刻和上一时刻下的每个部位质心的位置进行微分运算,获得当前时刻每个部位质心的速度和加速度,同时,上位机2还通过欧拉角微分方程对当前时刻和上一时刻下的每个部位质心的位置进行处理,获得当前时刻每个部位质心的角速度、角加速度。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
- 一种基于运动捕捉的放疗手术系统
- 基于运动捕捉和混合现实的眼科手术培训系统及方法