一种太阳追踪式室内采光系统
文献发布时间:2023-06-19 10:11:51
技术领域
本发明涉及光照采集技术领域,特别是涉及一种太阳追踪式室内采光系统。
背景技术
随着社会的发展,城市用地越来越紧张,楼高度增加而间距却在缩小,在这样的背景下,室内采光就成了一个必须解决的问题。室内采光不仅会影响生活质量,同时也造成了不必要的资源浪费,每年因采光而浪费的能源以及住户的经济损失都是非常巨大的。我国照明用电量占总发电量的百分之十,若对太阳光加以利用,解决楼宇采光问题,将节省大量能源,有利于可持续发展。
对于室内采光技术而言,目前主要有太阳追踪式光纤照明系统和太阳能发电照明系统。光纤照明系统的原理是:跟踪太阳方位,通过聚光装置,将太阳光射入光纤导管,由光纤导管传导光线,最后再经散射透镜以达到室内照明的目的,但是光纤照明系统有以下几个明显的缺点:1)聚光装置质量大,导致自动跟踪装置负荷过重,不能精确追踪到太阳的方位;2)设备复杂,安装灵活度低,无法适应多变的应用环境;3)聚光装置以及导光光纤价格昂贵,难以实现大规模民用。另一种太阳能发电照明系统,是通过太阳能电池板发电来供应室内照明装置的电源,此系统受太阳能板能量转换率及价格的影响,导致能量利用效率低下,价格偏高,不适合推广民用。
发明内容
本发明的目的是提供一种太阳追踪式室内采光系统,具有能够精确追踪太阳方位、易于安装和使用范围广的特点。
为实现上述目的,本发明提供了如下方案:
一种太阳追踪式室内采光系统,包括:太阳追踪装置、采光区定位装置和无线传输装置;
所述太阳追踪装置包括感光暗箱组、平面反射镜、支撑转动台和第一单片机;所述平面反射镜和第一单片机均设置于支撑转动台上;所述感光暗箱组与所述第一单片机电连接;所述超声波发射组与所述第一单片机电连接;所述第一单片机与所述支撑转动台的驱动部件电连接;
所述采光区定位装置包括超声波接收器和超声波发射组;所述超声波接收器中包括有第二单片机;所述超声波接收器放置于采光区域内;所述超声波接收器接收所述超声波发射组发射的信号;所述第二单片机用于根据所接收的发射信号获取所述超声波发射组与超声波接收器的相对位置坐标;
所述第一单片机和所述第二单片机通过所述无线传输装置进行连接。
可选的,所述感光暗箱组包括第一感光暗箱和第二感光暗箱;
所述第一感光暗箱沿长度方向的中心轴线与所述第二感光暗箱沿长度方向的中心轴线垂直。
可选的,所述第一感光暗箱的顶部和第二感光暗箱的顶部均开设有通光窄缝;
所述第一感光暗箱的底部和第二感光暗箱的底部设置有多列光敏电阻;
各列所述光敏电阻均沿感光暗箱的长度方向进行布置。
可选的,各列所述光敏电阻中各光敏电阻间的距离均不相等。
可选的,所述支撑转动台包括支撑板、第一支撑轴、第二支撑轴和第三支撑轴;所述驱动部件包括第一电机和第二电机;
所述第二转动电机固定在所述第三支撑轴的顶端;所述第二电机输出轴的轴线方向和第三支撑轴的轴线方向垂直;
所述第二转动电机的输出轴与所述第二支撑轴的底端连接;所述第二电机输出轴的轴线方向和所述第二支撑轴的轴线方向垂直;
所述第一电机固定在所述第二支撑轴的顶端;所述第一电机的输出轴与所述第一支撑轴的底端连接;所述第一电机输出轴的轴线方向分别与所述第一支撑轴的轴线方向和所述第二支撑轴的轴线方向平行;
所述第一支撑轴、第二支撑轴和第三支撑轴三者的轴线方向均平行;
所述支撑板固定在所述第一支撑轴的顶端。
可选的,所述感光暗箱组与所述超声波发射组均设置于所述第一支撑轴上。
可选的,所述无线传输装置为NRF24101无线通信装置;
所述第一单片机和第二单片机的数据串口上均连接有所述NRF24101无线通信装置。
可选的,所述太阳追踪式室内采光系统,还包括用于为所述太阳追踪式室内采光系统提供电能的太阳能板;所述太阳能板设置在所述支撑转动台上。
根据本发明提供的具体实施例,本发明公开了以下技术效果:本发明公开的太阳追踪式室内采光系统,先由感光暗箱获得太阳方位,将太阳角度信息传输给太阳追踪装置中的第一单片机,再由采光区定位装置将目标方位信息传输给太阳追踪装置,最后太阳追踪装置根据太阳方位信息和目标方位信息精确计算出反射镜的待转动角度后,由驱动部件控制平面反射镜进行旋转,直至平面反射镜的旋转角度为对应的待转动角度为止,从而将太阳光精确反射到目标方位,为目标区域提供照明。且本发明公开的太阳追踪式室内采光系统是不受使用地域和环境的限制,直接通过反射太阳光为采光区域照明,具有使用范围广的特点。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
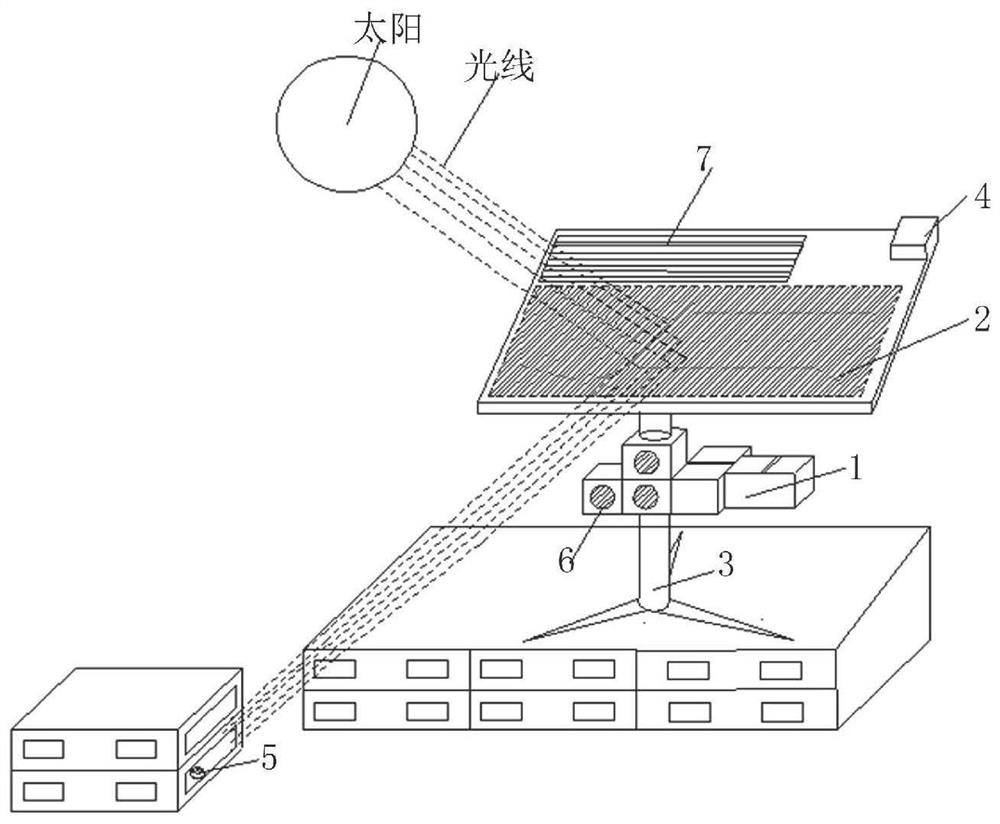
图1为本发明实施例太阳追踪式室内采光系统的结构示意图;
图2为本发明实施例感光暗箱组的结构示意图;
图3为本发明实施例支撑转动台的后视图;
图4为本发明实施例太阳方位检测电路的结构示意图;
图5为感光暗箱中使用的四列光敏电阻阵列各光敏电阻间的间距计算示意图;
图6为本发明实施例地平坐标系示意图;
图7为本发明实施例超声波发射组的结构示意图。
附图标记为:1-感光暗箱,2-平面反射镜,3-支撑转动台,4-第一单片机,5-超声波接收器,6-超声波发射组,7-太阳能板,11-第一感光暗箱,12-第二感光暗箱,13-感光阵列,14-通光窄缝,31-第三支撑轴,32-第二电机,33-第二支撑轴,34-第一电机,35-第一支撑轴,36-支撑板,61-第一超声波发射源,62-第二超声波发射源,63-第三超声波发射源。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种太阳追踪式室内采光系统,具有能够精确追踪太阳方位、易于安装和使用范围广的特点。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
图1为本发明实施例太阳追踪式室内采光系统的结构示意图,如图1所示,一种太阳追踪式室内采光系统,包括太阳追踪装置、采光区定位装置和无线传输装置;
所述太阳追踪装置包括感光暗箱组1、平面反射镜2、支撑转动台3和第一单片机4;所述平面反射镜2和第一单片机4均设置于支撑转动台3上;所述感光暗箱组1与所述第一单片机4电连接;所述超声波发射组6与所述第一单片机4电连接;所述第一单片机4与所述支撑转动台3的驱动部件电连接;
所述采光区定位装置包括超声波接收器5和超声波发射组6;所述超声波接收器5中包括有第二单片机;所述超声波接收器5放置于待采光区域内;所述超声波接收器5接收所述超声波发射组6发射的信号;所述第二单片机用于根据所接收的发射信号获取所述超声波发射组5和超声波接收器5的相对位置坐标;
所述第一单片机4和所述第二单片机通过所述无线传输装置进行连接。优选的,无线传输装置可以是NRF24101无线通信装置。所采用的NRF24101无线通信装置的频段为2.4GHz~2.5GHz。其工作方式为配对使用。所以在本发明系统中的单片机上均连接有NRF24101无线通信装置。
其中,可以在待采光区域的各个子区域中均布置有超声波接收器5。当某个子区域需要进行采光时,只需开启对应设置于此子区域的超声波接收器5,即可将太阳光发射到该子区域中。
如图2所示,所述感光暗箱组1包括第一感光暗箱11和第二感光暗箱12;每个感光暗箱的长为270mm,宽为140mm,高为36mm。所述第一感光暗箱11和第二感光暗箱12相邻设置,且所述第一感光暗箱11沿长度方向的中心轴线与所述第二感光暗箱12沿长度方向的中心轴线垂直。并且第一感光暗箱11的较长边朝向正东方向,第二感光暗箱12的较长边朝向正北方向。
所述第一感光暗箱11的顶部和第二感光暗箱12的顶部均开设有通光窄缝14;通光窄缝14优选为5mm长方形开口,太阳光线由此进入感光暗箱组1中。
在所述第一感光暗箱11的底部和第二感光暗箱12的底部,沿长度方向上均设置有由四列光敏电阻组成的感光阵列13。且每列感光阵列13的放置位置距感光暗箱的两端5mm。每列感光阵列13都有31个5mm规格GL5537光敏电阻,各光敏电阻间的距离均不相等。
如图3所示,所述支撑转动台3包括支撑板36、第一支撑轴35、第二支撑轴33和第三支撑轴31;所述驱动部件包括第一电机34和第二电机32;
所述第二转动电机32固定在所述第三支撑轴31的顶端;所述第二电机32输出轴的轴线方向和第三支撑轴31的轴线方向垂直;
所述第二转动电机32的输出轴与所述第二支撑轴33的底端连接;所述第二电机32输出轴的轴线方向和所述第二支撑轴33的轴线方向垂直;
所述第一电机34固定在所述第二支撑轴33的顶端;所述第一电机34的输出轴与所述第一支撑轴35的底端连接;所述第一电机34输出轴的轴线方向分别与所述第一支撑轴35的轴线方向和所述第二支撑轴33的轴线方向平行;
所述第一支撑轴35、第二支撑轴33和第三支撑轴31三者的轴线方向均平行;
所述支撑板36固定在所述第一支撑轴35的顶端。
所述感光暗箱组1与所述超声波发射组6均设置于所述第三支撑轴31上。
所述无线传输装置为NRF24101无线通信装置;
所述第一单片机4和第二单片机的数据串口上均连接有所述NRF24101无线通信装置。
本发明公开的太阳追踪式室内采光系统,还包括用于为所述太阳追踪式室内采光系统提供电能的太阳能板7;所述太阳能板7设置在所述支撑转动台3上。其中,太阳能板7尺寸为980*360mm,最大功率为20W,最大电压18V。太阳能板7粘贴在薄木板或金属构成的支架上。为了更加精确的对太阳光进行反射,将平面反射镜2面积和太阳能板7面积的比例优选设置为7:3。
太阳追踪式室内采光系统中还设置有储能装置。储能装置为12V,5AH的蓄电池。在储能装置和太阳能板7之间设置有升降压电路,升降压电路采用cn3722电源管理芯片,将太阳能板7输出的电压稳定在12.5V,以为电池供电。电池又通过导线与其他装置相连,为整个系统提供所需的电能。此外,在太阳能板7和储能装置的连接通路上设置有二极管。所设置的二极管可以保证在夜间不会为太阳能板7提供电流。
进一步,为了精确获得平面反射镜2的角度信息,在本发明所公开的太阳追踪式室内采光系统的太阳追踪装置中还可以设置有三轴加速度计MPU6050。将所采用的加速度计贴于平面反射镜2背面,且其水平中心线平行于所采用的平面反射镜2的水平中心线。
所采用的加速度计获取平面反射镜角度信息的原理为:地球重力方向总是垂直指向地心,当加速度计垂直中心线与重力方向不同时,加速度计会输出重力在加速度计三个相互垂直平面上的分量值,第一单片机通过三个分量值就可以得出平面反射镜的高度角信息。平面反射镜在水平面转动时,会产生水平方向上的加速度和角速度,第一单片机通过检测水平方向上的加速度和角速度经过计算就可以得出平面反射镜的方位角信息。
本发明公开的太阳追踪式室内采光系统的工作原理为:
太阳追踪装置中的感光暗箱组1将采集的太阳光角度输入给第一单片机4,第一单片机4经过计算得到太阳的方位信息(采集太阳方位时,各光敏电阻与第一单片机4之间的检测电路如图4所示)。采光区定位装置中的第二单片机通过计算得到超声波接收器5(采光区域)的位置信息。第二单片机将所获取的采光区域位置信息通过无线传输装置传输给第一单片机4。第一单片机4根据太阳追踪装置所获取的太阳方位信息,计算出平面反射镜2的待扭转角度后,控制第一电机34进行转动;第一单片机4根据采光区定位装置所获取的待采光区域的方位信息,计算出平面反射镜2的待仰俯角度后,控制第二电机32进行转动。通过第一单片机4来控制第一电机和第二电机的转动角度,来使平面反射镜2转动到第一单片机4计算得到的扭转角度和仰俯角度,进而将太阳光反射到待采光区域。
具体的,感光暗箱组1用以检测360度太阳方位角以及15度到165度的太阳高度角,其中高度角检测的间隔为5度。采用感光暗箱组1进行检测时的计算方法如图5所示:以太阳方位角为180度,高度角分别为85度和15度为例:当太阳高度角为85度时,光线与感光暗箱底面交点到通光缝隙垂直中心线的距离为36/tan85=3.2mm。当太阳角度为15度时,光线与暗箱底面交点到通光缝隙垂直中心线的距离为36/tan15=135mm。其余各个光敏电阻距中心线的距离可照相同计算方法得出。感光暗箱内壁漆上黑色无反光涂料以防止太阳光在暗箱内反射影响太阳角度测定的精度。
所采用的感光暗箱组检测太阳角度的原理是:太阳光线为平行光线,当光线透过通光缝隙后会在两个暗箱底部形成一个宽度为5mm的长方形亮斑,亮斑会照射到底部的感光阵列13上使其阻值减小,通过检测各个光敏电阻的变化就可以得出光斑距离各感光暗箱中心线的距离。由于第一感光暗箱11的较长边朝向正东方向,第二感光暗箱12的较长边朝向正北方向,这样就可以通过两个亮斑到相应暗箱中心线的距离值推导出太阳方位角。
推导计算原理如下所示:如图5所示,假设在某时刻太阳在南北朝向第二感光暗箱12上形成的亮斑线到其中心线的距离为A
θ
其中A
通过以上方法就得到了太阳的具体照射位置,由于每列感光阵列13采用了31个光敏电阻检测15-165度的太阳角度信息所以精度为5度,完全符合精度要求,相较于传统阵列式太阳追踪装置精度高,使用的光敏电阻数量大大减少,简化了电路的设计安装难度。
考虑到当太阳非垂直入射进感光暗箱组时,感光暗箱组中的亮斑会偏向一侧,致使感光暗箱中只有一侧可以受到照射,所以排除了使用单列感光阵列的方案,在各感光暗箱中的两侧均安装了光敏电阻,由于各感光暗箱的高度均为36mm,宽均为140mm,当太阳高度角大于15度时,亮斑才会投射到感光暗箱底面上,所以本发明的有效检测范围为15到165度,一天之内可以工作10小时,满足日常采光需要。
地平坐标系是一种空间极坐标系,在本发明实施例中,需要以第二超声波发射源62的右下角为坐标原点,正东方向为水平面上的极轴正方向,重力反方向为垂直平面上的极轴正方向,来构建地平坐标系。所构建得到的地平坐标系如图6所示。空间中任意一点的位置都可以用水平转角α和垂直转角β构成的点来描述,其中物体的水平转角α被称作物体的方位角,垂直转角β被称作高度角。本发明实施例中超声波发射组6的坐标为(0,0),即α=0,β=0。由于超声波发射组6垂直放置在平面反射镜2中心线的下方(第一支撑轴33上)。且二者距离相对与采光区距离来说很小,所以平面反射镜2的坐标也近似视为(0,0)。
在对采光区域进行定位的过程中,超声波发射组6呈东西方向放置,其中平面反射镜2的方位角和高度角都为0度,太阳的角度由感光暗箱组1测量,待采光区域的方位信息由超声波发射组6和超声波接收器5及第二单片机得出。如图7所示:其测量原理如下:
超声波接收器的方位角θ
其中B为超声波接收器5和第二超声波发射源62间的距离,A为超声波接收器5和第一超声波发射源61间的距离,L
超声波接收器的高度角θ
其中,C为超声波接收器5和第三超声波发射源63间的距离,L
得出待采光区域角度信息后,第一单片机4根据太阳角度信息进一步计算得到平面反射镜2的待旋转角度,具体计算过程如下:
假设在某次测量中由感光暗箱组1测得太阳光的方位角为α
γ
反射平面镜2的方位角γ
γ
而后第一单片机4控制电机运动使平面反射镜2的旋转角度达到计算出的高度角γ
基于上述内容,可以将本发明所公开的太阳追踪式室内采光系统的整个工作流程简单概述为:
先采用地平极坐标系构建太阳追踪装置和采光区定位装置的统一坐标系:以超声波发射组6中的第二超声波源62为极点,正东方向为极轴正方向,用以描述物体的方位角,重力反方向为垂直平面上的极轴正方向,用以描述物体的高度角。在采用系统采光之前,用户需将超声波接收器5放置在需要采光的地方。启动超声波接收器5即被定位物体后,系统将自动开始工作并利用上文的超声波空间定位原理测出超声波接收器5的方位即方位角和高度角,而后将方位发送给太阳追踪装置。
此后第一单片机4开始读取感光暗箱组1中测得的太阳角度信息并计算平面反射镜2需要到达的角度后,第一单片机4控制驱动部件进行驱动,在驱动部件的带动下平面反射镜2进行运动。此时,第一单片机4实时检测平面反射镜2的角度信息,当平面反射镜2的角度值到达第一单片机4计算出来的值后系统停止动作。平面反射镜2到达预定角度后,第一单片机4定时读取感光暗箱测得的太阳角度信息,当太阳角度发生变化时,第一单片机4控制平面反射镜2再次运动到达新的反射角度,向屋内提供照明。
本发明提供的太阳追踪式室内采光系统,具有以下优点:
在太阳方位测量过程中使用了一对相互垂直的感光暗箱分别检测太阳方位角在东方和北方向的分量,而后通过分量的矢量和得出太阳的方位角以及高度角。相较于传统光敏电阻阵列太阳追踪方式,此种太阳追踪方式在相同的精度下使用了更少的光敏电阻,极大的简化了电路的设计,使得安装和使用更简便可靠。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种太阳追踪式室内采光系统
- 一种分布式太阳采光阵列联动追踪机构