一种用于市政工程道路路面修复的自动平整装置
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及道路施工设备技术领域,具体是涉及一种用于市政工程道路路面修复的自动平整装置。
背景技术
道路工程是指以道路为对象而进行的规划、设计、施工、养护与管理工作的全过程及其所从事的工程实体。同其他任何门类的土木工程一样,道路工程具有明显的技术、经济和管理方面的特性;
中国专利:CN202020180015.1公开了道路施工用平整装置,包括平整机构、控制机构,还包括移动机构,所述移动机构的上端设置有所述控制机构,所述控制机构之间设置有所述平整机构,所述平整机构与所述移动机构通过螺钉连接,所述控制机构与所述移动机构通过螺钉连接。本实用新型通过设置移动机构可以实现在铺设混凝土路面时自动平整路面,降低了工人的劳动强度的同时还提高了路面的平整程度。
但是此专利中不能对不同宽度路面进行针对性的工作,实用性受到了限制,而且无法控制打磨机对接触路面的压力保持一致,所以需要提出一种用于市政工程道路路面修复的自动平整装置,可以针对不同宽度的道路进行针对性的平整工作,大大提高平整道路的速度。
发明内容
为解决上述技术问题,提供一种用于市政工程道路路面修复的自动平整装置,本技术方案可以针对不同宽度的道路进行针对性的平整工作,大大提高平整道路的速度。
为达到以上目的,本发明采用的技术方案为:
一种用于市政工程道路路面修复的自动平整装置,包括:
驱动车体;
开合驱动机构,设置于驱动车体的顶部,驱动车体用于驱动开合驱动机构进行移动,开合驱动机构有两个输出端;
扩张收缩组件,设置于驱动车体的首部,扩张收缩组件有两个活动端,扩张收缩组件的两个活动端分别开合驱动机构的两个输出端连接;
水平驱动机构,设置于扩张收缩组件上,扩张收缩组件用于对水平驱动机构的移动方向进行引导;
纵向驱动机构,设置于水平驱动机构上,水平驱动机构用于驱动纵向驱动机构沿扩张收缩组件进行移动;
打磨驱动机构,设置于纵向驱动机构的输出端,纵向驱动机构用于驱动打磨驱动机构进行纵向移动;
称重传感器,设置于打磨驱动机构的输出端,称重传感器用于检测打磨驱动机构的输出端接触路面的力度。
优选的,驱动车体包括:
车架;
第一压轮和第二压轮,第一压轮和第二压轮分别设置于车架的首尾两端并与其可转动连接;
行进驱动组件,设置于车架上,并且行进驱动组件的输出端分别与第一压轮和第二压轮的受力端连接。
优选的,行进驱动组件包括:
第一伺服电机,设置于车架上;
第一齿轮,设置于第一伺服电机的输出端;
第二齿轮,有两个,两个第二齿轮分别设置于第一压轮和第二压轮的受力端,第一齿轮和两个第二齿轮之间通过链条传动连接。
优选的,开合驱动机构包括:
背板,设置于驱动车体上;
第一气缸,设置于背板上;
推动杆,设置于第一气缸的输出端,推动杆上设置有第一限位杆,第一限位杆贯穿背板并与其滑动连接;
从动杆,有两个,两个从动杆的受力端分别与推动杆的两端铰接,两个从动杆的输出端分别与扩张收缩组件的两个活动端连接。
优选的,扩张收缩组件包括:
主引导臂,设置于驱动车体的首部,主引导臂上设置于齿条和滑轨,水平驱动机构分别与齿条传动连接和滑轨滑动连接;
第一延展臂和第二延展臂,第一延展臂和第二延展臂分别位于主引导臂的两端并与其滑动连接,两个从动杆分别与第一延展臂和第二延展臂连接。
优选的,第一延展臂和第二延展臂的结构一致,第一延展臂包括:
副引导臂,位于主引导臂的一端,副引导臂与从动杆固定连接,副引导臂与主引导臂的结构一致;
挡板,设置于从动杆的输出端并与其铰接;
导向杆,设置于挡板上下两端,挡板通过导向杆与主引导臂滑动连接。
优选的,水平驱动机构包括:
滑动架,设置于主引导臂上,并且滑动架与滑轨滑动连接;
连动杆,贯穿滑动架并与其可转动连接;
齿轮,设置于连动杆上,并且齿轮与齿条啮合;
第二伺服电机,设置于滑动架上,并且第二伺服电机的输出端与连动杆连接。
优选的,纵向驱动机构包括:
固定架,设置于水平驱动机构上,固定架上设置有螺纹筒并与其可转动连接;
纵移板,纵移板的顶部对称设有螺纹杆和第二限位杆上,螺纹杆与螺纹筒螺纹连接,第二限位杆贯穿固定架并与其滑动连接;
纵移驱动组件,设置于固定架上,纵移驱动组件的输出端与螺纹筒传动连接。
优选的,纵移驱动组件包括:
第三伺服电机,设置于固定架上;
第一皮带轮,设置于第三伺服电机的输出端;
第二皮带轮,套设于螺纹筒上并与其固定连接,第一皮带轮和第二皮带轮之间通过皮带传动连接。
优选的,打磨驱动机构包括:
驱动板,驱动板的顶部设置有驱动杆,驱动杆贯穿纵移板并与其可转动连接,驱动板的底部对称设置有套筒,套筒的内部设有弹簧;
第四伺服电机,设置于纵移板上,并且第四伺服电机与驱动杆连接;
转盘,转盘的顶部对称设置有插杆,插杆与套筒滑动连接,并且弹簧的输出端抵触插杆的顶端,称重传感器设置于转盘的顶部,称重传感器的输出端朝向驱动板。
本发明与现有技术相比具有的有益效果是:首先工作人员将本设备放置于工作地点,此时需要根据实际使用情况针对性的选择工作模式,当任务道路为窄型路面,纵向驱动机构开始工作,纵向驱动机构的输出端带动打磨驱动机构进行下降,直至打磨驱动机构的输出端接触道路表面,打磨驱动机构输出端接触路面的压力数值通过称重传感器进行检测,当检测压力达到规定数值时,称重传感器发送信号给控制器,控制器暂停纵向驱动机构的工作,驱动车体开始工作,驱动本设备开始沿道路走向进行移动,在移动的过程中,打磨驱动机构开始工作,打磨驱动机构的输出端进行转动并对路面进行修复,在修复的过程中水平驱动机构开始工作,水平驱动机构的通过纵向驱动机构带动打磨驱动机构沿扩张收缩组件进行移动,此时打磨驱动机构的输出端通过转动对路面进行修复,并边沿道路的宽度进行往复移动,当任务道路为宽型路面,开合驱动机构开始工作,开合驱动机构的两个输出端推动扩张收缩组件的两个活动端,扩张收缩组件的固定端为主路径,扩张收缩组件的两个活动端为支线路径,通过主路径和两个支线路径的拼合以适应宽型路面,水平驱动机构的移动范围增加,以后的工序与窄型路面的工作流程一致;
1、通过开合驱动机构和扩张收缩组件的设置,可以根据不同宽度的路面进行针对性修复,增加设备的实用性;
2、通过本设备的设置,可以针对不同宽度的道路进行针对性的平整工作,大大提高平整道路的速度。
附图说明
图1为本发明的主视图;
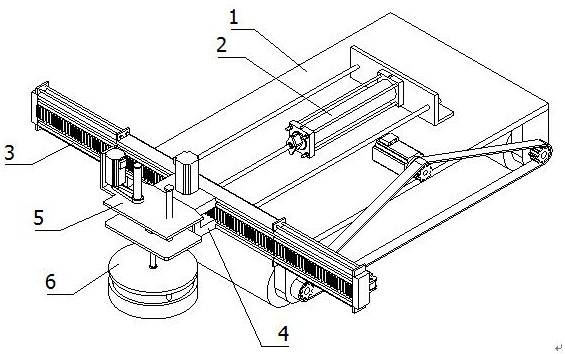
图2为本发明的立体结构示意图一;
图3为本发明的驱动车体的立体结构示意图;
图4为本发明的驱动车体的主视图;
图5为本发明的立体结构示意图二;
图6为本发明的扩张收缩组件和水平驱动机构的立体结构示意图;
图7为本发明的扩张收缩组件和水平驱动机构的侧视图;
图8为本发明的纵向驱动机构和打磨驱动机构的立体结构示意图;
图9为本发明的纵向驱动机构、打磨驱动机构和称重传感器的主视图;
图10为本发明的纵向驱动机构、打磨驱动机构和称重传感器的内部结构示意图。
图中标号为:
1-驱动车体;1a-车架;1b-第一压轮;1c-第二压轮;1d-行进驱动组件;1d1-第一伺服电机;1d2-第一齿轮;1d3-第二齿轮;
2-开合驱动机构;2a-背板;2b-第一气缸;2c-推动杆;2c1-第一限位杆;2d-从动杆;
3-扩张收缩组件;3a-主引导臂;3b-第一延展臂;3b1-副引导臂;3b2-挡板;3b3-导向杆;3c-第二延展臂;
4-水平驱动机构;4a-滑动架;4b-连动杆;4c-齿轮;4d-第二伺服电机;
5-纵向驱动机构;5a-固定架;5a1-螺纹筒;5b-纵移板;5b1-螺纹杆;5b2-第二限位杆;5c-纵移驱动组件;5c1-第三伺服电机;5c2-第一皮带轮;5c3-第二皮带轮;
6-打磨驱动机构;6a-驱动板;6a1-驱动杆;6a2-套筒;6a3-弹簧;6b-第四伺服电机;6c-转盘;6c1-插杆;
7-称重传感器。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图1至图2所示,一种用于市政工程道路路面修复的自动平整装置,包括:
驱动车体1;
开合驱动机构2,设置于驱动车体1的顶部,驱动车体1用于驱动开合驱动机构2进行移动,开合驱动机构2有两个输出端;
扩张收缩组件3,设置于驱动车体1的首部,扩张收缩组件3有两个活动端,扩张收缩组件3的两个活动端分别开合驱动机构2的两个输出端连接;
水平驱动机构4,设置于扩张收缩组件3上,扩张收缩组件3用于对水平驱动机构4的移动方向进行引导;
纵向驱动机构5,设置于水平驱动机构4上,水平驱动机构4用于驱动纵向驱动机构5沿扩张收缩组件3进行移动;
打磨驱动机构6,设置于纵向驱动机构5的输出端,纵向驱动机构5用于驱动打磨驱动机构6进行纵向移动;
称重传感器7,设置于打磨驱动机构6的输出端,称重传感器7用于检测打磨驱动机构6的输出端接触路面的力度;
首先工作人员将本设备放置于工作地点,此时需要根据实际使用情况针对性的选择工作模式,当任务道路为窄型路面,纵向驱动机构5开始工作,纵向驱动机构5的输出端带动打磨驱动机构6进行下降,直至打磨驱动机构6的输出端接触道路表面,打磨驱动机构6输出端接触路面的压力数值通过称重传感器7进行检测,当检测压力达到规定数值时,称重传感器7发送信号给控制器,控制器暂停纵向驱动机构5的工作,驱动车体1开始工作,驱动本设备开始沿道路走向进行移动,在移动的过程中,打磨驱动机构6开始工作,打磨驱动机构6的输出端进行转动并对路面进行修复,在修复的过程中水平驱动机构4开始工作,水平驱动机构4的通过纵向驱动机构5带动打磨驱动机构6沿扩张收缩组件3进行移动,此时打磨驱动机构6的输出端通过转动对路面进行修复,并边沿道路的宽度进行往复移动,当任务道路为宽型路面,开合驱动机构2开始工作,开合驱动机构2的两个输出端推动扩张收缩组件3的两个活动端,扩张收缩组件3的固定端为主路径,扩张收缩组件3的两个活动端为支线路径,通过主路径和两个支线路径的拼合以适应宽型路面,水平驱动机构4的移动范围增加,以后的工序与窄型路面的工作流程一致。
如图3所示驱动车体1包括:
车架1a;
第一压轮1b和第二压轮1c,第一压轮1b和第二压轮1c分别设置于车架1a的首尾两端并与其可转动连接;
行进驱动组件1d,设置于车架1a上,并且行进驱动组件1d的输出端分别与第一压轮1b和第二压轮1c的受力端连接;
驱动车体1开始工作,行进驱动组件1d开始工作,行进驱动组件1d的输出端带动第一压轮1b和第二压轮1c进行同向转动,第一压轮1b和第二压轮1c通过车架1a带动其他机构随其一同移动,通过第一压轮1b和第二压轮1c较宽的滚动面使得修复后的路面不会产生压痕。
如图4所示行进驱动组件1d包括:
第一伺服电机1d1,设置于车架1a上;
第一齿轮1d2,设置于第一伺服电机1d1的输出端;
第二齿轮1d3,有两个,两个第二齿轮1d3分别设置于第一压轮1b和第二压轮1c的受力端,第一齿轮1d2和两个第二齿轮1d3之间通过链条传动连接;
行进驱动组件1d开始工作,第一伺服电机1d1的输出端带动第一齿轮1d2转动,第一齿轮1d2通过链条带动两个第二齿轮1d3进行同向转动,两个第二齿轮1d3分别带动第一压轮1b和第二压轮1c进行同向转动。
如图5所示开合驱动机构2包括:
背板2a,设置于驱动车体1上;
第一气缸2b,设置于背板2a上;
推动杆2c,设置于第一气缸2b的输出端,推动杆2c上设置有第一限位杆2c1,第一限位杆2c1贯穿背板2a并与其滑动连接;
从动杆2d,有两个,两个从动杆2d的受力端分别与推动杆2c的两端铰接,两个从动杆2d的输出端分别与扩张收缩组件3的两个活动端连接;
开合驱动机构2开始工作,第一气缸2b的输出端推动推动杆2c靠近扩张收缩组件3,推动杆2c通过两个从动杆2d带动扩张收缩组件3的两个活动端翻转,使得扩张收缩组件3的主路径和两个支线路径的拼合完成,背板2a用于固定支撑,第一限位杆2c1用于对推动杆2c的移动方向进行引导。
如图5和图6所示扩张收缩组件3包括:
主引导臂3a,设置于驱动车体1的首部,主引导臂3a上设置于齿条和滑轨,水平驱动机构4分别与齿条传动连接和滑轨滑动连接;
第一延展臂3b和第二延展臂3c,第一延展臂3b和第二延展臂3c分别位于主引导臂3a的两端并与其滑动连接,两个从动杆2d分别与第一延展臂3b和第二延展臂3c连接;
两个从动杆2d分别第一延展臂3b和第二延展臂3c,第一延展臂3b和第二延展臂3c分别向主引导臂3a的两端伸出,直至主引导臂3a、第一延展臂3b和第二延展臂3c呈直线排列,水平驱动机构4沿主引导臂3a、第一延展臂3b和第二延展臂3c进行移动。
如图6所示第一延展臂3b和第二延展臂3c的结构一致,第一延展臂3b包括:
副引导臂3b1,位于主引导臂3a的一端,副引导臂3b1与从动杆2d固定连接,副引导臂3b1与主引导臂3a的结构一致;
挡板3b2,设置于从动杆2d的输出端并与其铰接;
导向杆3b3,设置于挡板3b2上下两端,挡板3b2通过导向杆3b3与主引导臂3a滑动连接;
两个从动杆2d分别推动第一延展臂3b和第二延展臂3c的挡板3b2向两端移动,两个副引导臂3b1两个从动杆2d翻转,直至主引导臂3a和两个副引导臂3b1处于一条直线状态,水平驱动机构4沿主引导臂3a和两个副引导臂3b1组成的路径移动,导向杆3b3用于对挡板3b2的移动方向进行引导,副引导臂3b1用于防止水平驱动机构4脱离副引导臂3b1。
如图7所示水平驱动机构4包括:
滑动架4a,设置于主引导臂3a上,并且滑动架4a与滑轨滑动连接;
连动杆4b,贯穿滑动架4a并与其可转动连接;
齿轮4c,设置于连动杆4b上,并且齿轮4c与齿条啮合;
第二伺服电机4d,设置于滑动架4a上,并且第二伺服电机4d的输出端与连动杆4b连接;
水平驱动机构4开始工作,第二伺服电机4d的输出端通过连动杆4b带动齿轮4c转动,齿轮4c通过与齿条的配合带动滑动架4a移动,滑动架4a沿主引导臂3a和两个副引导臂3b1的导向进行移动。
如图8所示纵向驱动机构5包括:
固定架5a,设置于水平驱动机构4上,固定架5a上设置有螺纹筒5a1并与其可转动连接;
纵移板5b,纵移板5b的顶部对称设有螺纹杆5b1和第二限位杆5b2上,螺纹杆5b1与螺纹筒5a1螺纹连接,第二限位杆5b2贯穿固定架5a并与其滑动连接;
纵移驱动组件5c,设置于固定架5a上,纵移驱动组件5c的输出端与螺纹筒5a1传动连接;
纵向驱动机构5开始工作,纵移驱动组件5c的输出端带动螺纹筒5a1转动,螺纹筒5a1通过螺纹杆5b1带动纵移板5b进行下降,纵移板5b带动打磨驱动机构6下降,固定架5a用于固定支撑,第二限位杆5b2用于对纵移板5b的移动方向进行引导。
如图9所示纵移驱动组件5c包括:
第三伺服电机5c1,设置于固定架5a上;
第一皮带轮5c2,设置于第三伺服电机5c1的输出端;
第二皮带轮5c3,套设于螺纹筒5a1上并与其固定连接,第一皮带轮5c2和第二皮带轮5c3之间通过皮带传动连接;
纵移驱动组件5c开始工作,第三伺服电机5c1的输出端带动第一皮带轮5c2转动,第一皮带轮5c2通过皮带带动第二皮带轮5c3转动,第二皮带轮5c3带动螺纹筒5a1转动。
如图10所示打磨驱动机构6包括:
驱动板6a,驱动板6a的顶部设置有驱动杆6a1,驱动杆6a1贯穿纵移板5b并与其可转动连接,驱动板6a的底部对称设置有套筒6a2,套筒6a2的内部设有弹簧6a3;
第四伺服电机6b,设置于纵移板5b上,并且第四伺服电机6b与驱动杆6a1连接;
转盘6c,转盘6c的顶部对称设置有插杆6c1,插杆6c1与套筒6a2滑动连接,并且弹簧6a3的输出端抵触插杆6c1的顶端,称重传感器7设置于转盘6c的顶部,称重传感器7的输出端朝向驱动板6a;
纵移板5b通过驱动板6a带动转盘6c下降,直至转盘6c贴至路面,当驱动板6a继续下降时压迫称重传感器7的输出端,称重传感器7对压力进行检测,当检测压力达到规定数值时,称重传感器7发送信号给控制器,控制器暂停纵向驱动机构5的工作,弹簧6a3用于转盘6c复位,还用于转盘6c随驱动板6a一同转动,打磨驱动机构6开始工作,第四伺服电机6b的输出端通过驱动杆6a1带动驱动板6a转动,驱动板6a通过套筒6a2和插杆6c1带动转盘6c转动,转盘6c通过转动路面进行修复。
本发明的工作原理:首先工作人员将本设备放置于工作地点,此时需要根据实际使用情况针对性的选择工作模式,当任务道路为窄型路面,纵向驱动机构5开始工作,c0的输出端带动螺纹筒5a1转动,螺纹筒5a1通过螺纹杆5b1带动纵移板5b进行下降,纵移板5b通过驱动板6a带动转盘6c下降,直至转盘6c贴至路面,当驱动板6a继续下降时压迫称重传感器7的输出端,称重传感器7对压力进行检测,当检测压力达到规定数值时,称重传感器7发送信号给控制器,控制器暂停纵向驱动机构5的工作,驱动车体1开始工作,行进驱动组件1d开始工作,第一伺服电机1d1的输出端带动第一齿轮1d2转动,第一齿轮1d2通过链条带动两个第二齿轮1d3进行同向转动,两个第二齿轮1d3分别带动第一压轮1b和第二压轮1c进行同向转动,第一压轮1b和第二压轮1c通过车架1a带动其他机构随其一同移动,在移动的过程中,打磨驱动机构6开始工作,第四伺服电机6b的输出端通过驱动杆6a1带动驱动板6a转动,驱动板6a通过套筒6a2和插杆6c1带动转盘6c转动,转盘6c通过转动路面进行修复,在修复的过程中水平驱动机构4开始工作,第二伺服电机4d的输出端通过连动杆4b带动齿轮4c转动,齿轮4c通过与齿条的配合带动滑动架4a移动,滑动架4a沿主引导臂3a进行移动,此时打磨驱动机构6的输出端通过转动对路面进行修复,并沿道路的宽度进行往复移动,当任务道路为宽型路面,开合驱动机构2开始工作,第一气缸2b的输出端推动推动杆2c靠近扩张收缩组件3,推动杆2c通过两个从动杆2d带动扩张收缩组件3的两个活动端翻转,使得扩张收缩组件3的主路径和两个支线路径的拼合完成以适应宽型路面,水平驱动机构4的移动范围增加,以后的工序与窄型路面的工作流程一致。
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一、工作人员将本设备放置于工作地点,此时需要根据实际使用情况针对性的选择工作模式,当任务道路为宽型路面时;
步骤二、开合驱动机构2开始工作,开合驱动机构2的两个输出端推动扩张收缩组件3的两个活动端,扩张收缩组件3的固定端为主路径,扩张收缩组件3的两个活动端为支线路径,通过主路径和两个支线路径的拼合以适应宽型路面;
步骤三、纵向驱动机构5开始工作,纵向驱动机构5的输出端带动打磨驱动机构6进行下降,直至打磨驱动机构6的输出端接触道路表面;
步骤四、打磨驱动机构6输出端接触路面的压力数值通过称重传感器7进行检测,当检测压力达到规定数值时,称重传感器7发送信号给控制器,控制器暂停纵向驱动机构5的工作;
步骤五、驱动车体1开始工作,驱动本设备开始沿道路走向进行移动;
步骤六、在移动的过程中,打磨驱动机构6开始工作,打磨驱动机构6的输出端进行转动并对路面进行修复;
步骤七、在修复的过程中水平驱动机构4开始工作,水平驱动机构4的通过纵向驱动机构5带动打磨驱动机构6沿扩张收缩组件3进行移动,此时打磨驱动机构6的输出端通过转动对路面进行修复,并边沿道路的宽度进行往复移动。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种用于市政工程道路路面修复的自动平整装置
- 一种用于道路路面平整度检测用的测量装置