建筑吊装器
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及吊装装置技术领域,更具体的说是建筑吊装器。
背景技术
专利号为CN201720484127.4的一种高效率的建筑设备吊装装置,该实用新型提供一种高效率的建筑设备吊装装置,包括支撑架,控制室,控制装置,转盘,辅助支架,底座结构,吊装装置,横梁,滑轨,吊装器,电机缠线轴,配重块,照明灯和牵引绳,所述的转盘安装在底座结构的上部;所述的支撑架固定在转盘的中上部;所述的控制室设置在转盘的上部前侧;所述的控制装置设置在控制室内。该实用新型照明灯的设置,有利于方便使用者在夜间操作使用;压力传感器和报警灯的设置,有利于方便检测吊装物的重量,且在物体过重时,报警灯能够及时报警;指示灯的设置,有利于在夜间使用时,能够更加轻易的被路人发现;固定绳和弹簧扣的配合设置,有利于方便吊装一些没有挂环的物体。但是该装置不能吊起柱状或锥状的筒体。
发明内容
本发明的目的是提供建筑吊装器,其有益效果为本发明能吊起柱状或锥状的筒体。
本发明的目的通过以下技术方案来实现:
建筑吊装器,包括环形架、滑座、角度调节件、倾斜支撑机构、底脚支撑座、承托件和连接环,所述的滑座设置有两个,两个滑座对称活动连接在环形架的两端,角度调节件设置有两个,两个角度调节件对称设置在两个滑座上,两个角度调节件皆与环形架活动连接,倾斜支撑机构设置有两个,两个倾斜支撑机构对称活动连接在两个角度调节件上,底脚支撑座设置有四个,两个倾斜支撑机构的下端分别设置有两个底脚支撑座,承托件设置有四个,四个底脚支撑座的下端分别配合连接一个承托件,环形架上固定连接两个连接环。
所述的环形架上设有T型架、第一电动推杆、滑块、铰接臂、第二电动推杆和滑套;T型架固定连接在环形架的内部,两个滑座分别滑动连接在T型架的两端,第一电动推杆固定连接在T型架上,第一电动推杆的伸缩端固定连接滑块,滑块滑动连接在T型架的下端,滑块的两端分别转动连接一个铰接臂,两个铰接臂分别与两个滑座转动连接,环形架的两端分别固定连接一个第二电动推杆,两个第二电动推杆的伸缩端分别固定连接一个滑套,两个角度调节件分别与两个滑套活动连接;两个滑座的下端分别固定连接两个柱杆;所述角度调节件与一个滑座上的两个柱杆活动连接。
所述的角度调节件包括连接架、U型板、固定轴、第二电动推杆、拨杆和滑杆,连接架两端分别固定连接一个U型板,两个U型板分别滑动配合连接在两个柱杆上,两个U型板之间固定连接固定轴;所述倾斜支撑机构与固定轴活动连接,第二电动推杆固定连接在连接架上,第二电动推杆伸缩端固定连接拨杆;滑杆滑杆固定连接在连接架的上端,滑杆滑动配合连接在滑套内。
所述的倾斜支撑机构包括铰接板、槽杆、滑框、第一电机、丝杠、槽块、铰接杆、导杆、横杆和齿条;铰接板的两端分别固定连接铰接板和滑框,铰接板转动连接在固定轴上,拨杆滑动连接在槽杆内,第一电机固定连接在滑框上,第一电机的输出轴固定连接丝杠,丝杠与槽块螺纹连接,槽块滑动连接在滑框、上,槽块的两端分别转动连接一个铰接杆,两个铰接杆上分别转动连接一个底脚支撑座,导杆和横杆皆固定连接在滑框的下端,底脚支撑座与导杆和横杆活动连接;滑框的下端对称固定连接两个齿条;所述底脚支撑座与齿条传动连接。
所述的底脚支撑座包括轴座、转轴、第一齿轮和底架;轴座滑动连接在导杆和横杆上,轴座与铰接杆转动连接,转轴转动连接在轴座上,转轴的两端分别固定连接第一齿轮和底架,第一齿轮与齿条啮合传动连接,承托件与底架连接。
所述的承托件包括三角形底块、固定座和卡槽;三角形底块固定连接在固定座上,固定座设置在底架的下端,三角形底块上设有卡槽。
所述的底脚支撑座还包括第二电机和第二齿轮,第二电机固定连接在底架上,第二电机输出轴固定连接第二齿轮;所述承托件还包括长轴和第三齿轮,长轴固定连接在固定座的上端,长轴转动连接在底架的下端,第三齿轮固定连接在长轴上,第三齿轮与第二齿轮啮合传动连接。
述的承托件还包括推板、圆杆和第三电动推杆;推板滑动连接在卡槽内,圆杆固定连接在推板上,圆杆与固定座滑动连接,圆杆上固定连接有竖杆,竖杆固定连接在第三电动推杆的伸缩端,第三电动推杆固定连接在固定座上。
本发明建筑吊装器的有益效果为:
本发明建筑吊装器,本发明能吊起柱状或锥状的筒体。改变滑座和倾斜支撑机构整体的长度,进而适用于不同高度的筒体,两个改变滑座之间间距可调适用于不同直径的筒体,四个承托件向外端转动180度的同时慢慢插入到筒体的底部,将筒体铲起对其进行托起,筒体的下端卡进四个承托件内,对筒体的底部进行承托和限位,两个滑座启动带动两个倾斜支撑机构向外端转动,可以对锥形的筒体进行承托;可以调节承托件的角度,进而能够托起不同倾斜程度的底面的筒体。
附图说明
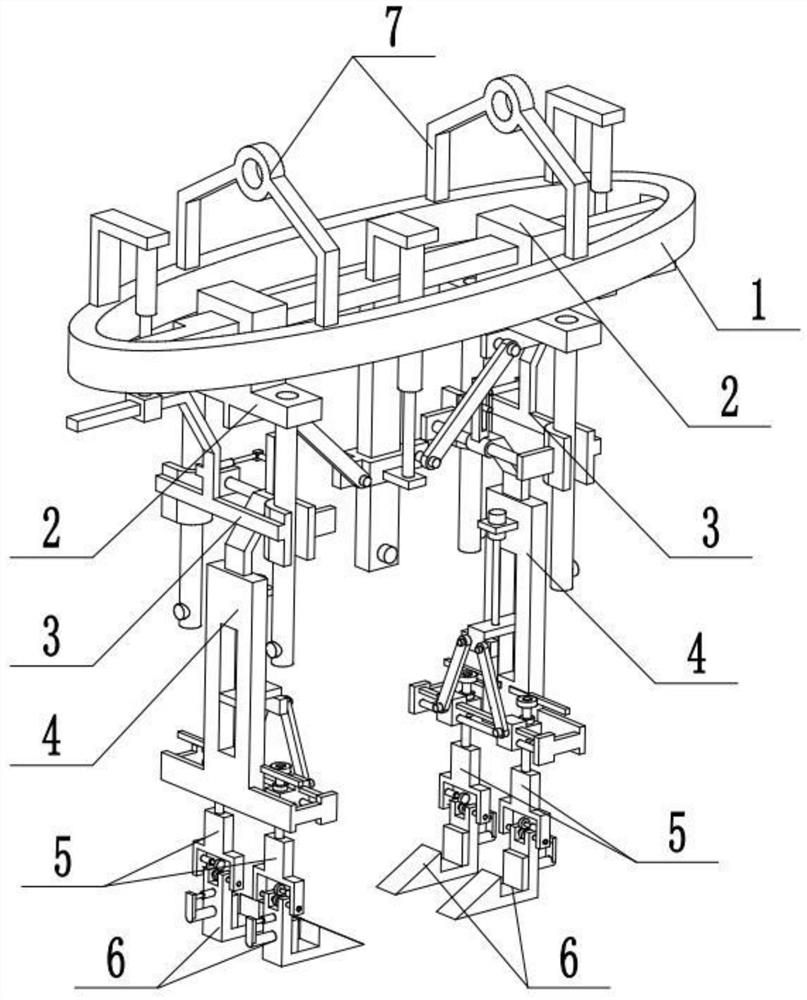
图1为本发明建筑吊装器的结构示意图一;
图2为本发明建筑吊装器的结构示意图二;
图3为环形架和连接环的结构示意图;
图4为滑座的结构示意图;
图5为角度调节件的结构示意图;
图6为倾斜支撑机构的结构示意图;
图7为底脚支撑座的结构示意图;
图8为承托件的结构示意图。
图中:环形架1;T型架1-1;第一电动推杆1-2;滑块1-3;铰接臂1-4;第二电动推杆1-5;滑套1-6;滑座2;柱杆2-1;角度调节件3;连接架3-1; U型板3-2;固定轴3-3;第二电动推杆3-4;拨杆3-5;滑杆3-6;倾斜支撑机构4;铰接板4-1;槽杆4-2;滑框4-3;第一电机4-4;丝杠4-5;槽块4-6;铰接杆4-7;导杆4-8;横杆4-9;齿条4-10;底脚支撑座5;轴座5-1;转轴5-2;第一齿轮5-3;底架5-4;第二电机5-5;第二齿轮5-6;承托件6;三角形底块6-1;固定座6-2;卡槽6-3;推板6-4;圆杆6-5;第三电动推杆6-6;连接环7。
具体实施方式
在发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;本申请中出现的电器元件在使用时均外接连通电源和控制开关。
下面结合附图1-8和具体实施方式对本发明做进一步详细的说明。
具体实施方式一:
下面结合图1-8说明本实施方式,建筑吊装器,包括环形架1、滑座2、角度调节件3、倾斜支撑机构4、底脚支撑座5、承托件6和连接环7,所述的滑座2设置有两个,两个滑座2对称活动连接在环形架1的两端,角度调节件3 设置有两个,两个角度调节件3对称设置在两个滑座2上,两个角度调节件3 皆与环形架1活动连接,倾斜支撑机构4设置有两个,两个倾斜支撑机构4对称活动连接在两个角度调节件3上,底脚支撑座5设置有四个,两个倾斜支撑机构4的下端分别设置有两个底脚支撑座5,承托件6设置有四个,四个底脚支撑座5的下端分别配合连接一个承托件6,环形架1上固定连接两个连接环7。
在使用时,通过两个连接环7将环形架1固定在外接的起吊装置上,起吊装置吊起环形架1带动两个滑座2和两个倾斜支撑机构4进入到柱状筒体内,起吊装置带动环形架1向下移动,使得四个承托件6向筒体的下端靠近移动,环形架1可以调节两个角度调节件3竖直方向的位置,角度调节件3带动倾斜支撑机构4上下移动,从而改变滑座2和倾斜支撑机构4整体的长度,进而适用于不同高度的筒体,环形架1启动调节两个滑座2之间的间距,使得位于两侧的两个承托件6向靠近筒体的内壁方向移动,适用于不同直径的筒体,四个承托件6靠近筒体内壁后,两个倾斜支撑机构4启动分别带动其对应的两个底脚支撑座5背离滑动,两个底脚支撑座5之间的间距变大的同时还向外端转动,四个底脚支撑座5分别带动四个承托件6向外端转180度,四个承托件6向外端转动180度的同时慢慢插入到筒体的底部,将筒体铲起,并对其进行托起,筒体的下端卡进四个承托件6内,对筒体的底部进行承托和限位,两侧的两个底脚支撑座5分别背离滑动,使得两侧的两个承托件6之间的间距变大,从而增大了受力面积,使得对筒体的承托更加稳定;
当需要对锥形的筒体进行吊装时,处于竖直方向的两个倾斜支撑机构4进入到锥形筒体内后,两个滑座2启动带动两个倾斜支撑机构4向外端转动,四个承托件6将筒体底部铲起托起,四个承托件6的角度可以进行调节,从而使得当倾斜支撑机构4带动承托件6转动倾斜时,承托件6也可以恢复至水平状态将筒体的水平底部铲起,同理,可以调节承托件6的角度,进而能够托起不同倾斜程度的底面的筒体。
具体实施方式二:
下面结合图1-8说明本实施方式,所述的环形架1上设有T型架1-1、第一电动推杆1-2、滑块1-3、铰接臂1-4、第二电动推杆1-5和滑套1-6;T型架 1-1固定连接在环形架1的内部,两个滑座2分别滑动连接在T型架1-1的两端,第一电动推杆1-2固定连接在T型架1-1上,第一电动推杆1-2的伸缩端固定连接滑块1-3,滑块1-3滑动连接在T型架1-1的下端,滑块1-3的两端分别转动连接一个铰接臂1-4,两个铰接臂1-4分别与两个滑座2转动连接,环形架1的两端分别固定连接一个第二电动推杆1-5,两个第二电动推杆1-5的伸缩端分别固定连接一个滑套1-6,两个角度调节件3分别与两个滑套1-6活动连接;两个滑座2的下端分别固定连接两个柱杆2-1;所述角度调节件3与一个滑座2上的两个柱杆2-1活动连接。第一电动推杆1-2启动带动滑块1-3上下滑动,滑块1-3通过两个铰接臂1-4带动两个滑座2之间的间距发生改变,两个滑座2 带动两个4之间的间距发生改变,从而使得装置可以适用于不同直径的筒体进行吊装。
具体实施方式三:
下面结合图1-8说明本实施方式,所述的角度调节件3包括连接架3-1、U 型板3-2、固定轴3-3、第二电动推杆3-4、拨杆3-5和滑杆3-6,连接架3-1 两端分别固定连接一个U型板3-2,两个U型板3-2分别滑动配合连接在两个柱杆2-1上,两个U型板3-2之间固定连接固定轴3-3;所述倾斜支撑机构4与固定轴3-3活动连接,第二电动推杆3-4固定连接在连接架3-1上,第二电动推杆 3-4伸缩端固定连接拨杆3-5;滑杆3-6滑杆3-6固定连接在连接架3-1的上端,滑杆3-6滑动配合连接在滑套1-6内。两个第二电动推杆1-5启动伸缩时通过滑套1-6带动两个滑杆3-6上下移动,两个滑杆3-6带动U型板3-2在柱杆2-1 上滑动,从而改变角度调节件3整体的竖直位置,角度调节件3带动倾斜支撑机构4、底脚支撑座5、承托件6上下移动,从而改变装置整体的长度,进而适用于不同高度的筒体。
具体实施方式四:
下面结合图1-8说明本实施方式,所述的的倾斜支撑机构4包括铰接板4-1、槽杆4-2、滑框4-3、第一电机4-4、丝杠4-5、槽块4-6、铰接杆4-7、导杆4-8、横杆4-9和齿条4-10;铰接板4-1的两端分别固定连接铰接板4-1和滑框4-3, 铰接板4-1转动连接在固定轴3-3上,拨杆3-5滑动连接在槽杆4-2内,第一电机4-4固定连接在滑框4-3上,第一电机4-4的输出轴固定连接丝杠4-5,丝杠4-5与槽块4-6螺纹连接,槽块4-6滑动连接在滑框4-3、上,槽块4-6的两端分别转动连接一个铰接杆4-7,两个铰接杆4-7上分别转动连接一个底脚支撑座5,导杆4-8和横杆4-9皆固定连接在滑框4-3的下端,底脚支撑座5与导杆 4-8和横杆4-9活动连接;滑框4-3的下端对称固定连接两个齿条4-10;所述底脚支撑座5与齿条4-10传动连接。在使用时,第二电动推杆3-4启动通过拨杆3-5带动槽杆4-2转动,槽杆4-2带动铰接板4-1绕着固定轴3-3转动,铰接板4-1带动滑框4-3向外端转动,从而改变滑框4-3的倾斜程度,从而可以对不同锥度的筒体进行吊装。
具体实施方式五:
下面结合图1-8说明本实施方式,所述的底脚支撑座5包括轴座5-1、转轴 5-2、第一齿轮5-3和底架5-4;轴座5-1滑动连接在导杆4-8和横杆4-9上,轴座5-1与铰接杆4-7转动连接,转轴5-2转动连接在轴座5-1上,转轴5-2 的两端分别固定连接第一齿轮5-3和底架5-4,第一齿轮5-3与齿条4-10啮合传动连接,承托件6与底架5-4连接。在使用时,第一电机4-4启动通过丝杠4-5 带动槽块4-6向下移动,槽块4-6通过两个铰接杆4-7带动两个轴座5-1和底架5-4向外端移动,两个轴座5-1带动两个第一齿轮5-3向外端移动,两个第一齿轮5-3通过与两个齿条4-10啮合传动连接发生转动,两个第一齿轮5-3带动两个转轴5-2转动,两个转轴5-2带动两个底架5-4向外端转动,两个底架 5-4带动两个承托件6背离滑动的同时向外端转动从而可以插入到筒体底部,背离滑动的两个承托件6之间间距变大,增大了承托的受力面积,增加了稳固性。
具体实施方式六:
下面结合图1-8说明本实施方式,所述的承托件6包括三角形底块6-1、固定座6-2和卡槽6-3;三角形底块6-1固定连接在固定座6-2上,固定座6-2设置在底架5-4的下端,三角形底块6-1上设有卡槽6-3。三角形底块6-1向外端转动时,其尖部先插入到筒体底面和地面之间,然后随着三角形底块6-1的转动,其倾斜面不断将筒体顶起,当三角形底块6-1完全转至外端时,筒体的下端进入到卡槽6-3内,实现对筒体下端的卡接,当起吊装置吊起筒体时,四个承托件6对筒体的下端进行支撑,以及避免筒体窜动。
具体实施方式七:
下面结合图1-8说明本实施方式,所述的底脚支撑座5还包括第二电机5-5 和第二齿轮5-6,第二电机5-5固定连接在底架5-4上,第二电机5-5输出轴固定连接第二齿轮5-6;所述承托件6还包括长轴6-7和第三齿轮6-8,长轴6-7 固定连接在固定座6-2的上端,长轴6-7转动连接在底架5-4的下端,第三齿轮6-8固定连接在长轴6-7上,第三齿轮6-8与第二齿轮5-6啮合传动连接。第二电机5-5启动通过第二齿轮5-6带动第三齿轮6-8转动,第三齿轮6-8通过长轴6-7带动三角形底块6-1转动,改变三角形底块6-1的倾斜程度,从而使得滑框4-3倾斜时,三角形底块6-1依旧可以对筒体的水平底面进行托起,或者通过改变三角形底块6-1的倾斜程度对不同的倾斜底面进行承托。
具体实施方式八:
下面结合图1-8说明本实施方式,所述的承托件6还包括推板6-4、圆杆 6-5和第三电动推杆6-6;推板6-4滑动连接在卡槽6-3内,圆杆6-5固定连接在推板6-4上,圆杆6-5与固定座6-2滑动连接,圆杆6-5上固定连接有竖杆,竖杆固定连接在第三电动推杆6-6的伸缩端,第三电动推杆6-6固定连接在固定座6-2上。第三电动推杆6-6启动带动推板6-4左右移动,改变了卡槽6-3 的大小,进而可以使得不同壁厚的筒体均可以卡进卡槽6-3内,对不同壁厚的筒体进行承托。
本发明建筑吊装器的工作原理:使用装置时,通过两个连接环7将环形架1 固定在外接的起吊装置上,起吊装置吊起环形架1带动两个滑座2和两个倾斜支撑机构4进入到柱状筒体内,起吊装置带动环形架1向下移动,使得四个承托件6向筒体的下端靠近移动,环形架1可以调节两个角度调节件3竖直方向的位置,角度调节件3带动倾斜支撑机构4上下移动,从而改变滑座2和倾斜支撑机构4整体的长度,进而适用于不同高度的筒体,环形架1启动调节两个滑座2之间的间距,使得位于两侧的两个承托件6向靠近筒体的内壁方向移动,适用于不同直径的筒体,四个承托件6靠近筒体内壁后,两个倾斜支撑机构4 启动分别带动其对应的两个底脚支撑座5背离滑动,两个底脚支撑座5之间的间距变大的同时还向外端转动,四个底脚支撑座5分别带动四个承托件6向外端转180度,四个承托件6向外端转动180度的同时慢慢插入到筒体的底部,将筒体铲起,并对其进行托起,筒体的下端卡进四个承托件6内,对筒体的底部进行承托和限位,两侧的两个底脚支撑座5分别背离滑动,使得两侧的两个承托件6之间的间距变大,从而增大了受力面积,使得对筒体的承托更加稳定;当需要对锥形的筒体进行吊装时,处于竖直方向的两个倾斜支撑机构4进入到锥形筒体内后,两个滑座2启动带动两个倾斜支撑机构4向外端转动,四个承托件6将筒体底部铲起托起,四个承托件6的角度可以进行调节,从而使得当倾斜支撑机构4带动承托件6转动倾斜时,承托件6也可以恢复至水平状态将筒体的水平底部铲起,同理,可以调节承托件6的角度,进而能够托起不同倾斜程度的底面的筒体。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 建筑构件的吊装辅助方法及装置和建筑构件的吊装方法
- 一种建筑材料用吊装器