一种起落系统以及无人机
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及航空技术领域,特别涉及一种起落系统以及无人机。
背景技术
目前,一些柱状结构的无人机,由于此类无人机的重心偏高,起降过程中容易翻倒,容易损坏机身。
因此,如何减少无人机翻倒以延长无人机的使用寿命,成为本领域技术人员亟待解决的技术问题。
发明内容
本发明的目的是提供一种起落系统以及无人机,以减少无人机翻倒以延长无人机的使用寿命。
为实现上述目的,本发明提供一种起落系统,包括:
可转动的设置在机身上的起落架;以及
磁吸驱动组件,所述磁吸驱动组件的一部分设置在所述起落架上,所述磁吸驱动组件的另一部分设置在所述机身上,当所述磁吸驱动组件位于第一状态时,推动所述起落架展开以支撑所述机身;当所述磁吸驱动组件位于第二状态时,将收起后的所述起落架吸附在所述机身的侧面。
本发明其中一个实施例中,所述磁吸驱动组件包括设置在所述起落架上的第一永磁体;设置在所述机身上的第一电磁体和为所述第一电磁体提供电源的第一供电元件,当所述第一供电元件提供正向电时,所述磁吸驱动组件处于第一状态,当所述第一供电元件提供负向电时,所述磁吸驱动组件处于第二状态。
本发明其中一个实施例中,所述起落架包括多个起落关节和多个起落支腿,每个所述起落关节一部分设置在所述机身上,另一部分与一个所述起落支腿连接。
本发明其中一个实施例中,所述起落关节包括设置在所述机身上的第一起落关节和与所述第一起落关节轴接的第二起落关节,所述第二起落关节与所述起落支腿连接。
本发明其中一个实施例中,所述起落关节还包括可滑动的设置在所述第二起落关节上的定位销和能够驱动所述定位销移动的定位驱动件,所述第一起落关节上设置有与所述定位销配合的第一定位孔,所述定位销插入所述第一定位孔时,所述起落架处于第一锁定状态,所述定位销脱离所述第一定位孔时,所述起落架处于解锁状态。
本发明其中一个实施例中,所述第一起落关节上还设置有与所述定位销配合的第二定位孔,所述定位销插入所述第二定位孔时,所述起落架处于第二锁定状态。
本发明其中一个实施例中,所述定位销为第二永磁体,所述定位驱动件包括设置在所述第二起落关节上的第二电磁体、驱动弹簧和为所述第二电磁体提供电源的第二供电元件,所述驱动弹簧设置在所述第二电磁体与所述定位销之间,当所述第二供电元件提供正向电时,所述第二电磁体和所述驱动弹簧推动所述定位销向靠近所述第一起落关节的方向移动,当所述第二供电元件提供负向电时,所述第二电磁体吸引所述定位销向远离所述第一起落关节的方向移动。
本发明其中一个实施例中,所述第二起落关节上设置有导向槽,所述定位销上设置有与所述导向槽相配合的导向凸起。
本发明其中一个实施例中,还包括控制器,所述控制器控制所述第一供电元件和/或所述第二供电元件的供电状况。
本发明其中一个实施例中,还包括通讯组件,所述控制器与所述通讯组件实现通讯交互。
本发明还公开了一种无人机,包括机身和如上述中任一项所述的起落系统,所述起落系统的起落架可转动的设置在所述机身上。
使用本发明的起落系统时,当需要展开起落架时,磁吸驱动组件运行并处于第一状态,磁吸驱动组件推动所述起落架展开以支撑所述机身;当需要收起起落架时,磁吸驱动组件运行并处于第二状态,将收起后的所述起落架吸附在所述机身的侧面。可见,采用本发明的起落系统可以将起落架切换为展开状态或者收起状态,展开状态时能够使得无人机在起降状态得到有效的支撑,从而不容易发生翻倒的问题,从而延长无人机的使用寿命。另外,在起飞时,还可在磁吸驱动组件的作用下进行收起从而减小起落架对飞行的影响。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
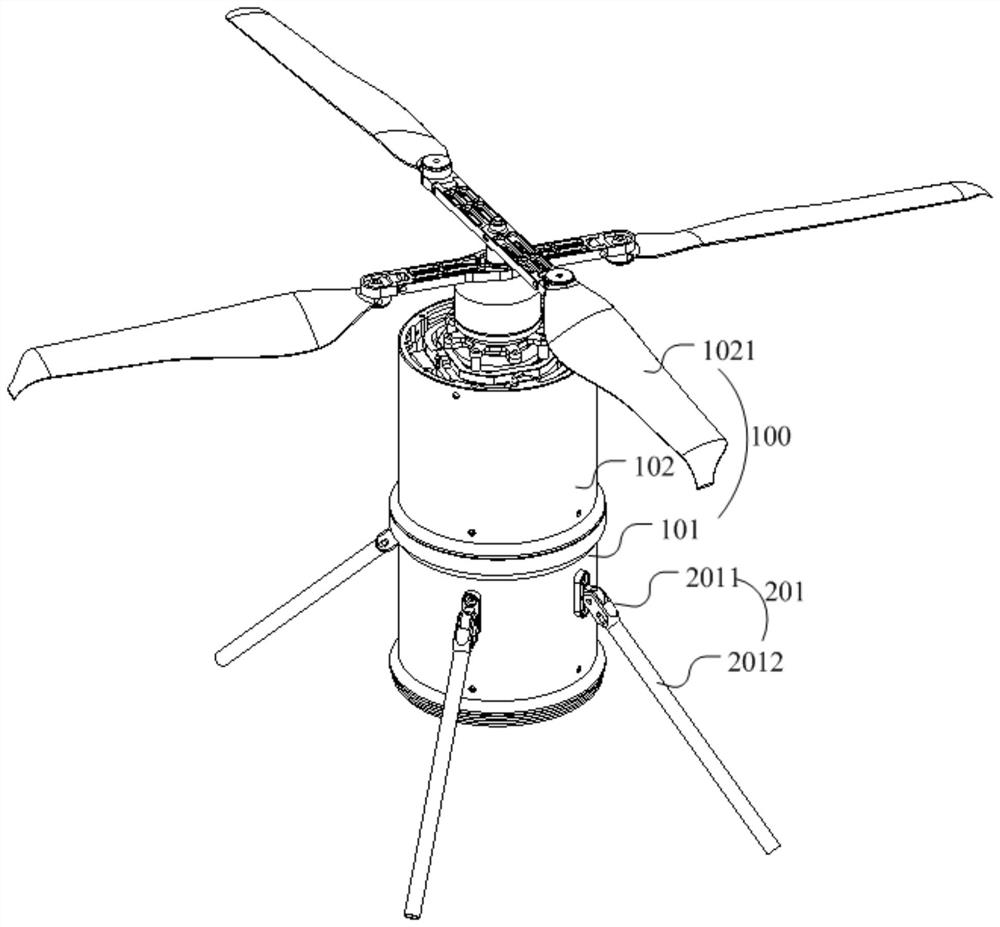
图1为本发明实施例所提供的一种无人机处于展开状态时的立体结构示意图;
图2为本发明实施例所提供的一种无人机处于收起状态时的立体结构示意图;
图3为图1所提供的一种起落架的立体结构示意图;
图4为图1所提供的一种起落架的剖视结构示意图;
图5为本发明实施例所提供的一种起落系统的立体结构示意图;
其中:100为机身、101为电池舱、102为动力舱、1021为螺旋桨、200为起落系统、201为起落架、202为磁吸驱动组件、203为定位销、204为定位驱动件、2011为起落关节、2012为起落支腿、2021为第一永磁体、2022为第一电磁体、2031为导向凸起、2041为第二电磁体、2042为驱动弹簧、2011a为第一起落关节、2011b为第二起落关节、2011c为第一定位孔、2011d为第二定位孔、2011e为导向槽。
具体实施方式
本发明提供一种起落系统以及无人机,以减少无人机翻倒以延长无人机的使用寿命。
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和实施方式对本发明作进一步的详细说明。
请参考图1至图5,本发明公开的起落系统200,包括起落架201和磁吸驱动组件202,其中,起落架201可转动的设置在机身100上;磁吸驱动组件202的一部分设置在起落架201上,磁吸驱动组件202的另一部分设置在机身100上,当磁吸驱动组件202位于第一状态时,推动起落架201展开以支撑机身100;当磁吸驱动组件202位于第二状态时,将收起后的起落架201吸附在机身100的侧面。
使用本发明的起落系统200时,当需要展开起落架201时,磁吸驱动组件202运行并处于第一状态,磁吸驱动组件202推动起落架201展开以支撑机身100;当需要收起起落架201时,磁吸驱动组件202运行并处于第二状态,将收起后的起落架201吸附在机身100的侧面。可见,采用本发明的起落系统200可以将起落架201切换为展开状态或者收起状态,展开状态时能够使得无人机在起降状态得到有效的支撑,从而不容易发生翻倒的问题,从而延长无人机的使用寿命。另外,在起飞时,还可在磁吸驱动组件202的作用下进行收起从而减小起落架201对飞行的影响。
磁吸驱动组件202的作用是提供将起落架201吸附在机身100的磁吸力,以及将起落架201推离机身100的排斥力。具体的,该磁吸驱动组件202包括第一永磁体2021、第一电磁体2022和第一供电元件,其中,第一永磁体2021设置在起落架201上,第一电磁体2022设置在机身100上,第一供电元件为第一电磁体2022提供电源支持;当第一供电元件提供正向电时,磁吸驱动组件202处于第一状态,当第一供电元件提供负向电时,磁吸驱动组件202处于第二状态。正向电和负向电可以互换,即当第一供电元件提供负向电时,磁吸驱动组件202处于第一状态,当第一供电元件提供正向电时,磁吸驱动组件202处于第二状态。
或者第一永磁体2021设置在机身100上,第一电磁体2022设置在起落架201上,第一供电元件为第一电磁体2022提供电源支持;当第一供电元件提供正向电时,磁吸驱动组件202处于第一状态,当第一供电元件提供负向电时,磁吸驱动组件202处于第二状态。正向电和负向电可以互换,即当第一供电元件提供负向电时,磁吸驱动组件202处于第一状态,当第一供电元件提供正向电时,磁吸驱动组件202处于第二状态。
需要说明的是,磁吸驱动组件202在处于第一状态时,第一电磁体2022与第一永磁体2021之间产生排斥力,从而将推动起落架201展开;磁吸驱动组件202在处于第二状态时,第一电磁体2022与第一永磁体2021之间产生磁吸力,从而将收起后的起落架201吸附在机身100上。
起落架201的结构形式有很多,只要具有支撑无人机机身100的功能均可以理解为起落架201。本发明其中一个实施例中,起落架201包括多个起落关节2011和多个起落支腿2012,每个起落关节2011一部分设置在机身100上,另一部分与一个起落支腿2012连接。本发明中起落架201通过起落关节2011设置在机身100上,实现起落架201可转动的设置在机身100上,而起落关节2011与起落支腿2012为一体式结构或者分体式结构。
只要能够实现起落支腿2012与机身100的可转动连接均在本发明的保护范围内,例如,起落关节2011包括设置在机身100上的第一起落关节2011a和与第一起落关节2011a轴接的第二起落关节2011b,第二起落关节2011b与起落支腿2012连接。其中,第一起落关节2011a和第二起落关节2011b通过转轴连接,或者第一起落关节2011a和第二起落关节2011b通过定位凸起轴接。
第一起落关节2011a上设置有旋转孔,第二起落关节2011b与旋转孔相对应的位置设置有第一定位凸起和第二定位凸起,通过第一定位凸起和第二定位凸起实现第二起落关节2011b轴接在第一起落关节2011a上。或者第一起落关节2011a和第二起落关节2011b上设置有贯穿的旋转孔,通过该旋转孔安装转轴。以上仅介绍了两种实现第一起落关节2011a和第二起落关节2011b轴接的连接方式,只要能够实现第二起落关节2011b与第一起落关节2011a轴接的连接方式均在本发明的保护范围。
为了提高稳定性,起落关节2011还包括可滑动的设置在第二起落关节2011b上的定位销203和能够驱动定位销203移动的定位驱动件204,第一起落关节2011a上设置有与定位销203配合的第一定位孔2011c,定位销203插入第一定位孔2011c时,起落架201处于第一锁定状态,定位销203脱离第一定位孔2011c时,起落架201处于解锁状态。当需要对起落架201上锁时,定位驱动件204推动定位销203向靠近第一定位孔2011c的方向移动直至定位销203插入第一定位孔2011c中,从而锁死起落关节2011,使得起落关节2011不能继续旋转。当收起起落支腿2012时,定位驱动件204驱动定位销203向远离第一定位孔2011c的方向移动,实现起落关节2011的解锁。
进一步的,为了节省能耗,第一起落关节2011a上还设置有与定位销203配合的第二定位孔2011d,定位销203插入第一定位孔2011c时,起落架201处于第二锁定状态。定位销203与第一定位孔2011c和第二定位孔2011d相配合时均能够实现对起落关节2011上锁的作用,只是上锁的位置存在差异,定位销203与第一定位孔2011c相配合时,起落架201在展开状态进行锁定;定位销203与第二定位孔2011d相配合时,起落架201在收起状态进行锁定。
具体的,当定位销203为第二永磁体时,该定位驱动件204包括设置在第二起落关节2011b上的第二电磁体2041和为第二电磁体2041提供电源的第二供电元件,当第二供电元件提供正向电时,第二电磁体2041推动定位销203向靠近第一起落关节2011a的方向移动,当第二供电元件提供负向电时,第二电磁体2041吸引定位销203向远离第一起落关节2011a的方向移动。其中,正向电和负向电可以互换。
本发明实施例中,在第二电磁体2041与定位销203之间还设置有驱动弹簧2042,当定位销203与第一定位孔2011c或者第二定位孔2011d相配合时,驱动弹簧2042能够为定位销203提供预紧力,从而能够使得该定位销203较为稳定的与第一定位孔2011c或第二定位孔2011d相配合,并使得起落架通常状态下处于第一锁定状态或第二锁定状态。另外,在驱动弹簧2042的作用下,能够为起落关节2011在旋转过程中提供预紧力,减少了起落关节2011在旋转过程中噪音。
本发明其中一个实施例中为了使得定位销203按照规定路径移动,并在第二起落关节2011b上设置有导向槽2011e,而定位销203上设置有与导向槽2011e相配合的导向凸起2031。
为了方便调节,该起落系统200还包括控制器,控制器控制第一供电元件的供电状况。控制器可根据无人机的起落需求自行控制第一供电元件的供电状况。例如,控制器获取无人机降落的电信号后,控制第一供电元件为第一电磁体2022供电使得磁吸驱动组件202处于第一状态,使得起落架201展开,以支撑无人机;控制器获取无人机处于飞行状态时,控制第一供电元件为第一电磁体2022供电使得磁吸驱动组件202处于第二状态,使得起落架201收起,以降低起落架201在飞行过程中的阻力。或者控制器内部设置计时器,根据计时器来控制第一供电元件的通电状况。
进一步的,为了方便控制,控制器还可以控制第二供电元件的供电状况。例如,控制器获取无人机降落的电信号后,控制第一供电元件为第一电磁体2022供电使得磁吸驱动组件202处于第一状态,使得起落架201展开。为了使得起落架201稳定的处于展开状态,控制器控制第二供电元件提供正向电,第二电磁体2041和驱动弹簧2042推动定位销203向靠近第一起落关节2011a的方向移动,起落架201处于第一锁定状态;当需要切换到第二状态时,控制器控制第二供电元件提供负向电,第二电磁体2041向吸引定位销203向远离第一起落关节2011a的方向移动,起落架201处于解锁状态;控制器控制第一供电元件为第一电磁体2022供电使得磁吸驱动组件202处于第二状态,使得起落架201收起,以降低起落架201在飞行过程中的阻力。为了使得起落架201稳定的处于收起状态,控制器控制第二供电元件提供正向电,第二电磁体2041和驱动弹簧2042推动定位销203向靠近第一起落关节2011a的方向移动,起落架201处于第二锁定状态。
进一步的本发明的起落系统200还包括通讯组件,控制器与通讯组件实现通讯交互。即,当无人机通过遥控器或者移动终端进行控制时,通过该通讯组件能够实现控制器与遥控器或者移动终端的通讯交互,从而人为控制起落架201的收起和展开。
本发明还公开了一种无人机,包括机身100和如上述中任一项的起落系统200,起落系统200的起落架201可转动的设置在机身100上。由于上述起落系统200具有以上有益效果,包括该起落系统200的无人机也具有相应的效果,此处不再赘述。
上述机身100包括动力舱102和电池舱101,其中动力舱102实现无人机的飞行与控制,电池舱101为无人机提供电力支持,动力舱102与电池舱101可拆卸连接或者一体式结构。动力舱102装有电机、螺旋桨1021、飞控系统以及作动装置,能够实现无人机的飞行与控制。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种快速起落无人机以及无人机的起落控制方法
- 一种充电起落架、无人机、充电平台及无人机续航充电系统