一种基于负压的番茄采摘机及其工作方法
文献发布时间:2023-06-19 10:36:57
技术领域
本发明属于农业采摘机械技术领域,具体涉及一种基于负压的番茄采摘机及其工作方法。
背景技术
随着番茄种植业的迅速发展,果园机械自动化成为趋势。但番茄果实生长密集,相互触碰且表皮容易损坏,使得番茄的机械自动化采摘难度较大。现有的番茄机械化采摘方式主要是将番茄植株连根铲起后进行再分拣,此种方式虽然有较高的效率,但只适用于果实抗裂、耐压、耐贮运、能够集中成熟的品种。而传统的抓取式采摘因末端执行器夹持力度较大,无法避免对番茄表面质量造成损伤,进而影响后续的贮藏和运输,同时,番茄成串生长的特性也为视觉识别带来了很大的难度,进一步为抓取式采摘带来困难。
发明内容
为了解决现有技术中的上述问题,本发明设计了一种基于负压的番茄采摘机及其工作方法。
为了解决现有技术中的上述问题,本发明一方面采用了以下方案:
一种基于负压的番茄采摘机,包括机器视觉模块、机械臂、负压采摘系统和控制器,所述机器视觉模块设置在所述机械臂末端,所述负压采摘系统的采摘口通过可伸缩的柔性管与吸力装置连通,所述采摘口设置在所述机械臂的末端并可随所述机械臂移动,所述采摘口的端部设置有旋转刀具;所述柔性管的下部设置有番茄排出口。
进一步,所述旋转刀具包括环形安装板和均布在所述环形安装板上的多组刀片,所述刀片一端可转动的设置在所述环形安装板上且由相对应的刀片驱动舵机驱动;所述刀片驱动舵机与所述控制器连接。
进一步,所述采摘口内壁上还设置有光电传感器,所述光电传感器与所述控制器连接。
进一步,所述柔性管的两端分别通过相应的大口径空气管与所述采摘口和所述吸力装置连接。
进一步,所述番茄排出口处设置有阀门,且所述阀门闭合时将所述番茄排出口密封;所述阀门通过连杆开关控制其开闭,所述阀门转动连接在所述柔性管下部。
进一步,所述连杆开关包括连杆、摇杆和舵机,所述舵机与所述控制器连接。
进一步,所述番茄排出口下方设置有收集箱。
进一步,所述吸力装置采用离心风机,所述离心风机与所述控制器连接。
进一步,所述控制器包括主控制器和舵机控制板。
进一步,所述机械臂包括一个旋转关节和三个俯仰关节,所述关节分别与相对应的关节控制舵机连接,所述关节控制舵机与所述控制器连接。
进一步,还包括行走底盘,所述机械臂、负压采摘系统和控制器设置在所述行走底盘上。
本发明另一方面还公开了以下方案:
一种基于负压的番茄采摘机的工作方法,工作时,电源通电,机器视觉模块识别定位采摘目标并将采摘目标的位置信息传递给控制器,所述控制器根据位置信息控制机械臂的各关节控制舵机使得所述机械臂将负压采摘系统的采摘口移动到合适位置;然后,所述负压采摘系统的吸力装置提供负压使采摘目标进入所述采摘口内部;当所述采摘口内的光电传感器检测到有果实进入时,安装在所述采摘口端部的旋转刀具工作割断番茄藤,使番茄落入所述负压采摘系统的柔性管内;最后,所述负压采摘系统的番茄排出口处的阀门打开使番茄落入下方收集箱内,从而完成目标番茄的采摘;同时,所述旋转刀具复位等待下次工作。
该基于负压的番茄采摘机及其工作方法具有以下有益效果:
(1)本发明中,由舵机驱动机械臂运动,由离心风机提供负压,由机器视觉模块识别采摘目标,由机械臂带动采摘口靠近采摘目标,由采摘口进行采摘作业,由番茄排出口完成果实的收集,具有操作简便、自动化程度高、节省人力、作业彻底等优点。
(2)本发明中,利用了机械臂带动涵道管的形式,布置合理、结构紧凑。
(3)本发明结构简单、果实损伤小、采摘效率高,可以克服传统采摘方式对果实的损伤和番茄生长特性的影响,便于实现自动化。
附图说明
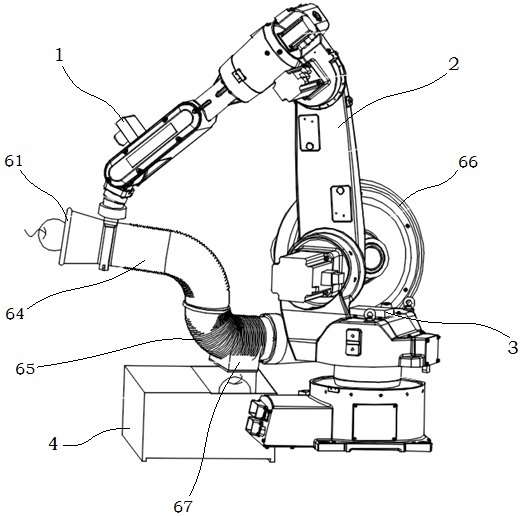
图1:本发明实施方式中基于负压的番茄采摘机的立体结构示意图;
图2:本发明实施方式中采摘口的剖视图;
图3:本发明实施方式中旋转刀具的工作状态示意图Ⅰ;
图4:本发明实施方式中旋转刀具的工作状态示意图Ⅱ;
图5:本发明实施方式中番茄排出口的局部放大图。
附图标记说明:
1—机器视觉模块;2—机械臂;3—控制器;4—收集箱;61—采摘口;62—光电传感器;63—旋转刀具;631—刀片;632—刀片驱动舵机;64—大口径空气管;65—柔性管;66—吸力装置;67—番茄排出口;671—阀门;672—连杆开关。
具体实施方式
下面结合附图,对本发明做进一步说明:
图1至图5示出了本发明一种基于负压的番茄采摘机及其工作方法的具体实施方式。图1是本实施方式中基于负压的番茄采摘机的结构示意图;图2是本实施方式中采摘口的结构示意图;图3和图4是本实施方式中旋转刀具的工作状态示意图;图5是本实施方式中番茄排出口的局部放大图。
如图1所示,本实施方式中的基于负压的番茄采摘机,包括机器视觉模块1、机械臂2、负压采摘系统和控制器3,机器视觉模块1设置在机械臂2末端,所述负压采摘系统的采摘口61通过可伸缩的柔性管65与吸力装置66连通,采摘口61设置在机械臂2的末端并可随机械臂2移动,采摘口61的端部设置有旋转刀具63;柔性管65的下部设置有番茄排出口67。
优选地,旋转刀具63包括环形安装板和均布在所述环形安装板上的多组刀片631,刀片631一端可转动的设置在所述环形安装板上且由相对应的刀片驱动舵机632驱动;刀片驱动舵机632与控制器3连接,如图3和图4所述。
优选地,采摘口61内壁上还设置有光电传感器62,光电传感器62与控制器3连接,如图2所示。
优选地,柔性管65的两端分别通过相应的大口径空气管64与采摘口61和吸力装置66连接,如图1所示。
优选地,番茄排出口67处设置有阀门671,且阀门671闭合时将番茄排出口67密封;阀门671通过连杆开关672控制其开闭,阀门671转动连接在柔性管65下部,如图1和图5所示。
具体地,连杆开关672包括连杆、摇杆和舵机;所述舵机与控制器3连接,如图5所示。
优选地,番茄排出口67下方设置有收集箱4,如图1所示。
本实施例中,吸力装置66采用离心风机,所述离心风机与控制器3连接,如图1所示。
本实施例中,控制器3包括主控制器和舵机控制板。
优选地,机械臂2包括一个旋转关节和三个俯仰关节,所述关节分别与相对应的关节控制舵机连接,所述关节控制舵机与控制器3连接,如图1所示。
优选地,还包括行走底盘,机械臂2、负压采摘系统和控制器3设置在所述行走底盘上。本实施例中,行走底盘没有画出。
本实施方式中的基于负压的番茄采摘机,工作时,电源通电,机器视觉模块1识别定位采摘目标并将采摘目标的位置信息传递给控制器3,控制器3根据位置信息控制机械臂2的各关节控制舵机使得机械臂2将负压采摘系统的采摘口61移动到合适位置;然后,负压采摘系统的吸力装置66提供负压使采摘目标进入采摘口61内部;当采摘口61内的光电传感器62检测到有果实进入时,安装在采摘口61端部的旋转刀具63工作割断番茄藤,使番茄落入负压采摘系统的柔性管65内;最后,负压采摘系统的番茄排出口67处的阀门671打开使番茄落入下方收集箱4内,从而完成目标番茄的采摘;同时,旋转刀具63复位等待下次工作。
具体地,如图1所示,在工作过程中,首先将本番茄采摘机置于植株附近,电源通电后,机械臂2的各关节驱动舵机和离心风机开始工作,其中机器视觉模块1将识别到的果实位置信息通过通讯传递给控制器3,控制器3控制个关节驱动电机将采摘口61运送至合适位置;然后,离心风机高速工作,产生的负压将目标果实吸引至采摘口61中;
当采摘口61内的光电传感器62检测到有果实进入时,刀具驱动舵机632驱动旋转刀具63的刀片631转动,如图4所示,完成对番茄藤蔓的切割,使果实落入大口径空气管64内,随后旋转刀具63在刀具驱动舵机632的驱动下张开,如图3所示,等待下一次工作;
如图5所示,番茄排出口67处设置有开关,当果实靠近时,连杆开关672转动带动阀门671打开,果实落入收集箱4内,从而完成果实的采摘收集工作,随后连杆开关672带动阀门671关闭以保证负压采摘系统的气密性。
本发明中,由舵机驱动机械臂运动,由离心风机提供负压,由机器视觉模块识别采摘目标,由机械臂带动采摘口靠近采摘目标,由采摘口进行采摘作业,由番茄排出口完成果实的收集,具有操作简便、自动化程度高、节省人力、作业彻底等优点。
本发明中,利用了机械臂带动涵道管的形式,布置合理、结构紧凑。
本发明结构简单、果实损伤小、采摘效率高,可以克服传统采摘方式对果实的损伤和番茄生长特性的影响,便于实现自动化。
上面结合附图对本发明进行了示例性的描述,显然本发明的实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围内。
- 一种基于负压的番茄采摘机及其工作方法
- 一种基于图像识别的框架式番茄采摘机器人