一种基于智能四驱的运动姿态识别系统
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及光伏清扫技术领域,尤其涉及一种基于智能四驱的运动姿态识别系统。
背景技术
光伏清扫设备也称为光伏清扫机器人,是用来清扫光伏板的常用设备。光伏清扫机设备由清扫本体和四个移动轮组成。光伏清扫设备在长时间清扫过程中,行走会歪斜。当光伏清扫设备累计歪斜达到一定程度后,清扫效果会很差,此时光伏清扫设备会自锁,待人工调整其至正常轨迹后再开始运行。
因此光伏清扫设备在行走过程中无法感知自身姿态歪斜问题和无法准确纠正自身姿态歪斜问题亟需解决。
发明内容
为了克服上述技术的不足,本发明的目的是提供一种基于智能四驱的运动姿态识别系统。
本发明所采用的技术方案是:一种基于智能四驱的运动姿态识别系统,包括设置在清扫本体上的中央处理控制器,所述清扫本体上设置有多个行走轮,所述清扫本体上设置有多个距离传感器,所述中央处理控制器用于接收处理距离传感器的信号并控制行走轮运动。
优选的,所述多个距离传感器包括第一超声波传感器和第二超声波传感器,第一超声波传感器和第二超声波传感器对称设置在清扫本体两端。
优选的,所述多个距离传感器包括第一激光传感器和第二激光传感器,第一激光传感器和第二激光传感器对称设置在清扫本体两端。
优选的,所述多个行走轮包括设置在第一行走轮、第二行走轮、第三行走轮和第四行走轮,其中,第一行走轮和第二行走轮安装在清扫本体的同一端,第三行走轮和第四行走轮安装在清扫本体的另一端,第一行走轮和第三行走轮同轴设置,第二行走轮和第四行走轮同轴设置。
与现有技术相比,本发明具有以下有益效果:本发明所述的一种基于智能四驱的运动姿态识别系统,能使光伏清扫设备在行走过程中感知自身姿态歪斜程度,并且及时准确纠正自身姿态歪斜,使得行走轨迹符合光伏板的位置,从而保证清扫效果最佳。
附图说明
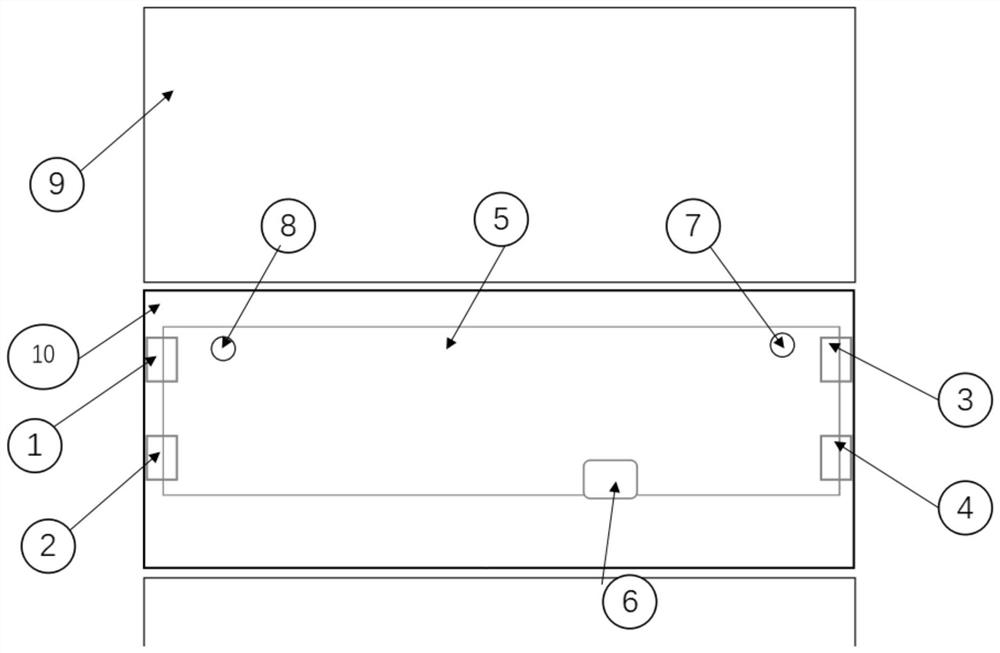
图1是本发明中实施例一的结构示意图;
图2是本发明中实施例二的结构示意图;
图3是光伏清扫设备行走歪斜的结构示意图。
具体实施方式
下面结合附图和具体实施例对本发明作详细说明。
实施例一
如图1所示,一种基于智能四驱的运动姿态识别系统,包括设置在清扫本体5上的中央处理控制器6。
清扫本体5上设置有第一行走轮1、第二行走轮2、第三行走轮3和第四行走轮4,其中,第一行走轮1和第二行走轮2安装在清扫本体5的同一端,第三行走轮3和第四行走轮4安装在清扫本体5的另一端,第一行走轮1和第三行走轮3同轴设置,第二行走轮2和第四行走轮4同轴设置。
清扫本体5上设置有第一超声波传感器7和第二超声波传感器8,第一超声波传感器7和第二超声波传感器8对称设置在清扫本体5两端。
所述中央处理控制器6用于接收处理第一超声波传感器7和第二超声波传感器8的信号并控制第一行走轮1、第二行走轮2、第三行走轮3和第四行走轮4的运动。
光伏清扫设备沿多个接连排序的光伏板行走,并对光伏板进行清扫。相邻的光伏板之间具有缝隙。光伏清扫设备沿第一光伏板10到第二光伏板9的方向行走。第一光伏板10与第二光伏板9之间具有缝隙。
工作原理:第一超声波传感器7和第二超声波传感器8为结构和型号相同的超声波传感器。第一超声波传感器7和第二超声波传感器8自身均具有发射超声波和接收超声波的功能。由于第一超声波传感器7和第二超声波传感器8不断发射超声波,超声波到光伏板的距离与超声波到缝隙的距离是不同的,因此第一超声波传感器7和第二超声波传感器8均可感知何时经过缝隙。
跨越缝隙时因为反射面远,超声波传感器接收到的反馈信号时间长,中央处理控制器6会根据信号反馈时间差来判断是否感应器遇到缝隙了,同时中央处理控制器6记录第一超声波传感器7和第二超声波传感器8感应到缝隙的时间;当第一超声波传感器7和第二超声波传感器8感应到缝隙的时序有差别,则表明光伏清扫设备姿态歪斜了。姿态歪斜角度θ=ArcSin(时间差*行走速度/N),N是第一超声波传感器7和第二超声波传感器8之间的距离,从而精确知道光伏清扫设备的倾斜角度。当光伏清扫设备歪斜后,中央处理控制器6通过控制不同行走轮的行走速度从而使光伏清扫设备调整自身歪斜的问题。
如图3所示,此时中央处理控制器6控制第一行走轮1、第二行走轮2转速快一些并同时控制第三行走轮3和第四行走轮4转速慢一些,从而使清扫本体5歪斜角度得到调整,进而完成姿态纠正。
实施例二
如图2所示,一种基于智能四驱的运动姿态识别系统,包括设置在清扫本体5上的中央处理控制器6。
清扫本体5上设置有第一行走轮1、第二行走轮2、第三行走轮3和第四行走轮4,其中,第一行走轮1和第二行走轮2安装在清扫本体5的同一端,第三行走轮3和第四行走轮4安装在清扫本体5的另一端,第一行走轮1和第三行走轮3同轴设置,第二行走轮2和第四行走轮4同轴设置。
清扫本体5上设置有第一激光传感器11和第二激光传感器12,第一激光传感器11和第二激光传感器12对称设置在清扫本体5两端。
所述中央处理控制器6用于接收处理第一激光传感器11和第二激光传感器12的信号并控制第一行走轮1、第二行走轮2、第三行走轮3和第四行走轮4的运动。
光伏清扫设备沿多个接连排序的光伏板行走,并对光伏板进行清扫。相邻的光伏板之间具有缝隙。光伏清扫设备沿第一光伏板10到第二光伏板9的方向行走。第一光伏板10与第二光伏板9之间具有缝隙。
工作原理:第一激光传感器11和第二激光传感器12为结构和型号相同的激光传感器。第一激光传感器11和第二激光传感器12自身均具有发射激光和接收激光的功能。由于第一激光传感器11和第二激光传感器12不断发射激光,激光到光伏板的距离与激光到缝隙的距离是不同的,因此第一激光传感器11和第二激光传感器12均可感知何时经过缝隙。
跨越缝隙时因为反射面远,激光传感器接收到的反馈信号时间长,中央处理控制器6会根据信号反馈时间差来判断是否感应器遇到缝隙了,同时中央处理控制器6记录第一激光传感器11和第二激光传感器12感应到缝隙的时间;当第一激光传感器11和第二激光传感器12感应到缝隙的时序有差别,则表明光伏清扫设备姿态歪斜了。姿态歪斜角度θ=ArcSin(时间差*行走速度/N),N是第一激光传感器11和第二激光传感器12之间的距离,从而精确知道光伏清扫设备的倾斜角度。当光伏清扫设备歪斜后,中央处理控制器6通过控制不同行走轮的行走速度从而使光伏清扫设备调整自身歪斜的问题。
如图3所示,此时中央处理控制器6控制第一行走轮1、第二行走轮2转速快一些并同时控制第三行走轮3和第四行走轮4转速慢一些,从而使清扫本体5歪斜角度得到调整,进而完成姿态纠正。
上述实施例以本发明技术方案为前提,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于上述的实施例。
- 一种基于智能四驱的运动姿态识别系统
- 一种基于智能四驱的金属感应式运动姿态识别系统