乳房X射线照相装置
文献发布时间:2023-06-19 11:06:50
本申请基于并主张在先日本专利申请2019-211331(申请日:11/22/2019)的优先权,本申请通过参照在先申请而包含该在先申请的全部内容。
技术领域
本发明的实施方式涉及乳房X射线照相装置。
背景技术
乳房X射线照相(mammography)装置是利用压迫板压迫载置于摄影台上的乳房,扩张乳腺,进行从1个方向的二维图像收集的乳房专用X射线摄影装置。由于存在于乳房之中的乳腺是立体地分支的前端连接小叶的结构,因此,仅仅原样摄影的话,乳腺的重叠多,无法进行准确的评价。因此,通过压迫乳房并将其拉伸得较薄,能够减少乳腺的重叠,并且能够进行基于更低的剂量的X射线摄影。
现有技术文献
专利文献
专利文献:国际公开第2015/045484号
发明内容
在使用了乳房X射线照相装置的图像诊断中,有时不仅进行CC(Cranio-Caudal:头尾方向)摄影,还进行MLO(Medio-Lateral-Oblique:内外斜位方向)摄影。在MLO摄影中,在定位时或刚刚结束定位之后,乳房因自重而向比正确的部位(位置)靠下侧的位置偏移。结果,没在正确的位置进行X射线摄影,无法得到正确的图像。特别是在摄影大的乳房时,该问题显著地出现。为了防止乳房从正确的位置偏移,诊疗放射线技师必须在定位时,用手强力地抬起乳房,进而用手用力地压迫乳房的同时进行定位。
另外,在进行大的乳房的定位的情况下,诊疗放射线技师必须在以较强的力使乳房扩展后,用手施加力以避免扩展后的乳房复原,并且一边使手退避一边压迫。诊疗放射线技师必须用力压迫乳房,因此体力被耗费而疲劳。特别是,在如集团体检那样在1天进行30名以上的X射线摄影的情况下,非常辛苦。
本发明要解决的技术问题在于,在进行乳房的定位时,抑制乳房因自重而从正确的位置偏移。
实施方式的乳房X射线照相装置具备:乳房载置台,载置乳房;压迫板,对被载置于所述乳房载置台的所述乳房进行压迫;支承臂,将所述乳房载置台支承为能够倾斜;以及处理电路,控制所述压迫板的驱动,以使被载置于通过所述支承臂而倾斜的所述乳房载置台上的所述乳房在从下方被支承的同时被压迫。
附图说明
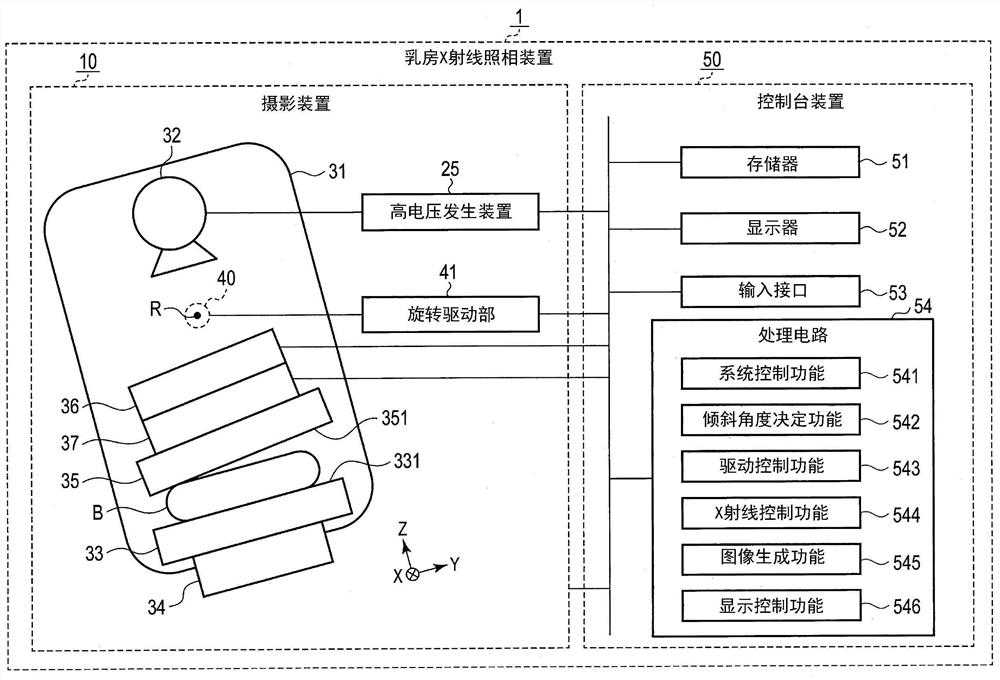
图1是例示第一实施方式的乳房X射线照相装置的结构的图。
图2是表示第一实施方式的乳房X射线照相装置的外观的图。
图3是表示第一实施方式的压迫板、压迫板移动机构及压迫板倾斜机构的结构的一例的图。
图4是表示对第一实施方式的摄影角度与倾斜角度的目标值的关系进行表示的对应表的一例的图。
图5是表示第一实施方式的乳房X射线照相装置的定位执行处理的步骤的一例的流程图。
图6是表示第一实施方式的乳房X射线照相装置的MLO摄影的情形的立体图。
图7是用于说明第一实施方式的定位执行处理的步骤的概略图。
图8是用于说明第一实施方式的定位执行处理的步骤的概略图。
图9是用于说明第一实施方式的定位执行处理的步骤的概略图。
图10是用于说明第一实施方式的定位执行处理的步骤的概略图。
图11是对第二实施方式的乳房X射线照相装置执行定位执行处理时的乳房载置台与压迫板之间的距离与倾斜角度的关系进行表示的图。
图12是表示第二实施方式的乳房X射线照相装置的定位执行处理的步骤的一例的流程图。
图13是表示从第二实施方式的定位执行处理的开始起经过的时间与倾斜角度的关系的图。
图14是例示第三实施方式的乳房X射线照相装置的结构的图。
图15是表示第三实施方式的乳房X射线照相装置的定位执行处理的步骤的一例的流程图。
图16是表示从第三实施方式的定位执行处理的开始起经过的时间与由传感器检测出的压力之间的关系的图。
附图标记说明
1…乳房X射线照相装置
10…摄影装置
20…支承单元
21…基座
22,24…支柱部
25…高电压发生装置
30…摄影单元
31…支承臂
32…X射线产生部
33…乳房支承台
331…支承面
34…X射线检测器
35…压迫板
351…压迫面
36…压迫板移动机构
37…压迫板倾斜机构
38…操作面板
39A,39B…传感器
40…支承轴
41…旋转驱动部
50…控制台装置
51…存储器
52…显示器
53…输入接口
54…处理电路
541…系统控制功能
542…倾斜角度决定功能
543…驱动控制功能
544…X射线控制功能
545…图像生成功能
546…显示控制功能
B…乳房
L…距离
α…摄影角度
θ…倾斜角度
具体实施方式
一般而言,根据实施方式,乳房X射线照相装置具备:乳房载置台,载置乳房;压迫板,对载置于所述乳房载置台上的所述乳房进行压迫;支承臂,将所述乳房载置台支承为能够倾斜;以及处理电路,对所述压迫板的驱动进行控制,以使被载置于通过所述支承臂而倾斜的所述乳房载置台上的所述乳房在从下方被支承的同时被压迫。
以下,参照附图对X射线诊断装置的实施方式进行详细地说明。在以下的说明中,对于具有大致相同的功能以及结构的结构要素,标注相同的附图标记,仅在必要的情况下进行重复说明。另外,在以下的说明中,“乳房X射线照相装置”也可以称为“X射线诊断装置”或“乳房X射线摄影装置”。
(第一实施方式)
图1是例示第一实施方式的乳房X射线照相装置1的结构的图。图2是表示乳房X射线照相装置1的外观的图。如图1及图2所示,乳房X射线照相装置1具备摄影装置10和控制台装置50。摄影装置10具备支承单元20、摄影单元30、以及支承轴40。
支承单元20设置于检查室的地面或壁面,对摄影单元30进行支承。支承单元20经由支承轴40支承摄影单元30。支承轴40具有中心轴R。支承轴40以中心轴R为中心相对于支承单元20旋转。中心轴R是摄影单元30的旋转轴。
在支承单元20的内部收容有用于使支承轴40转动的旋转驱动部41。旋转驱动部41是用于使支承轴40转动的转动机构和/或驱动部,与支承轴40连接。旋转驱动部41例如由齿轮、步进马达、带式输送机以及丝杠等实现。旋转驱动部41按照支承轴40的旋转角信息,以中心轴R为中心使支承轴40相对于支承单元20旋转。并且,通过旋转驱动部41,经由支承轴40与支承单元20连接的摄影单元30绕中心轴R转动。通过摄影单元30绕中心轴R转动,由此能够进行头尾方向(CranioCaudal projection:CC)的摄影(以下,称为CC摄影)、内外斜向(MedioLateral Oblique projection:MLO)的摄影(以下,称为MLO摄影)等。
支承单元20具有基座21、第一支柱部22、第二支柱部23。基座21设置于检查室的地面或壁面。第一支柱部22支承于基座21,并且支承第二支柱部23。在第一支柱部22及第二支柱部23的内部,收容有用于使第二支柱部23相对于第一支柱部22上下移动的上下移动机构、驱动部。在摄影时,通过该上下移动机构,配合患者的身高来调整第二支柱部23的高度。支承单元20也可以被称为支架。
另外,在支承单元20中收容有高电压产生装置25。为了使从X射线管的阴极产生的热电子加速,高电压产生装置25产生施加于阳极与阴极之间的高电压并向X射线管输出。高电压产生装置25也可以收容于控制台装置50。支承单元20是支承台的一例。
摄影单元30具备支承臂31、X射线产生部32、乳房载置台33、X射线检测器34、压迫板35、压迫板移动机构36、压迫板倾斜机构37、操作面板38。
支承臂31支承X射线产生部32、乳房载置台33、X射线检测器34、压迫板35、压迫板移动机构36、压迫板倾斜机构37以及操作面板38。另外,支承臂31与支承轴40连接。通过支承轴40旋转,支承臂31与X射线产生部32、乳房载置台33、X射线检测器34、压迫板35、压迫板移动机构36、压迫板倾斜机构37及操作面板38一起以中心轴R为中心相对于支承单元20旋转。支承臂31将乳房载置台33支承为能够倾斜。另外,支承臂31在后述的载置面331相对于水平面倾斜的状态下支承X射线产生部32、乳房载置台33、X射线检测器34以及压迫板35。支承臂31也可以被称为C臂。
X射线产生部32具备对被检体照射X射线的X射线管以及X射线光圈。另外,X射线产生部32也可以称为X射线管装置。
X射线管是产生X射线的真空管。X射线管具备管球、设置于管球的灯丝(阴极)和钨阳极。X射线管通过高电压使从灯丝放出的热电子加速。X射线管通过使该加速电子与钨阳极碰撞而产生X射线。
X射线光圈位于X射线管与乳房载置台33之间。X射线光圈由铅板等金属板构成。X射线光圈通过将开口区域外的X射线遮蔽,来缩小X射线管产生的X射线对被检体的乳房的照射范围(以下,称为X射线照射范围)。X射线光圈通过将X射线被遮蔽的区域调节为任意的尺寸,来调整X射线照射范围的大小。X射线光圈根据操作者从输入接口53输入的X射线照射范围的大小,由未图示的驱动装置来驱动。
乳房载置台33与X射线产生部32对置设置。在乳房载置台33上载置有患者的乳房。乳房载置台33支承所载置的患者的乳房。乳房载置台33也可以被称为摄影台。另外,在支承臂31的内部收容有用于使乳房载置台33移动的驱动部。驱动部例如由齿轮、步进马达、带式输送机以及丝杠等实现,与乳房载置台33连接。驱动部根据乳房载置台33的位置信息,使乳房载置台33相对于支承臂31移动。患者是被检体的一例。
乳房载置台33具有载置面331。载置面331与X射线产生部32对置。载置面331是用于载置患者的乳房的平面。载置面331也可以被称为摄影面。
X射线检测器34收容于乳房载置台33。X射线检测器34以与X射线产生部32对置的方式配置。X射线检测器34检测从X射线管发出并透过载置于乳房载置台33的乳房B后的X射线。作为这样的X射线检测器34,能够使用将X射线直接变换为电荷的检测器、和在变换为光之后变换为电荷的检测器,这里以前者为例进行说明,但也可以是后者。即,接收机例如具备将透过了乳房后的X射线变换为电荷并蓄积的平面状的FPD(Flat Panel Detector:平板检测器)和生成用于读出蓄积于该FPD的电荷的驱动脉冲的栅极驱动器。FPD是将微小的检测元件在列方向以及行方向上二维排列而构成的。各个检测元件具备:光电膜,感知X射线,根据入射X射线量生成电荷;电荷蓄积电容器,蓄积在该光电膜中产生的电荷;以及TFT(薄膜晶体管),以规定的定时输出蓄积在电荷蓄积电容器中的电荷。所蓄积的电荷根据栅极驱动器供给的驱动脉冲依次被读出。作为X射线检测器34,也可以采用膜暗盒或CR暗盒。
在此,将沿着中心轴R的方向规定为X方向,将连结X射线检测器34的检测面的中心与X射线管的焦点的方向(以下,称为摄影方向)规定为Z方向。X方向与Z方向正交。另外,将与Z方向以及X方向正交的方向规定为Y方向。通过摄影单元30以中心轴R为中心旋转,Z方向和Y方向以X方向为中心旋转。在Z方向与铅垂方向(上下侧方向)一致的情况下,Y方向相当于摄影时从患者观察的左右方向。
另外,载置面331相对于Z方向正交,与X方向以及Y方向平行。即,载置面331是与摄影方向正交的平面。摄影方向相对于铅垂方向的角度(以下,称为摄影角度)α相当于载置面331相对于水平面的角度。摄影角度α在0度至90度的范围内变化。另外,在进行X射线摄影时,载置面331与被检体的胸壁正交,Y方向与被检体的胸壁平行。
压迫板35对载置于乳房载置台33上的乳房进行压迫。压迫板35设置于X射线产生部32与乳房载置台33之间。压迫板35能够在Z方向上相对于乳房载置台33移动。压迫板35例如由热塑性树脂形成。作为热塑性树脂,例如使用具有高机械强度并且使X射线透过的聚碳酸酯、或者透明的丙烯酸类树脂。
压迫板35具有压迫面351。压迫面351与乳房载置台33的载置面331对置。压迫面351是用于在其与载置面331之间压迫乳房B的平面。压迫板35以在Y方向上相对于载置面331倾斜的状态向接近乳房载置台33的方向移动,由此从下方对载置于载置面331的乳房B进行支承,并且在其与载置面331之间压迫乳房B。另外,压迫板35以随着朝向下侧而与载置面331的距离变小的状态,向接近载置面331的方向移动。
压迫板移动机构36由移动机构和驱动部构成。压迫板移动机构36与压迫板35连接,使压迫板35在Z方向上相对于乳房载置台33移动,由此使压迫板35向相对于乳房载置台33接近或远离的方向移动。压迫板移动机构36例如由齿轮、步进马达、带式输送机以及丝杠等实现,与压迫板35连接。若压迫板35通过压迫板移动机构36向接近乳房载置台33的方向移动,则在压迫板35与乳房载置台33之间,载置于乳房载置台33的载置面331上的乳房被压迫。被压迫板35压迫的乳房B扩张得较薄,乳房B内的乳腺的重叠减少。
压迫板倾斜机构37由倾斜机构和驱动部构成。压迫板移动机构36与压迫板35连接。压迫板移动机构36通过改变压迫板35相对于乳房载置台33的倾斜度,来调整在Y方向上的压迫板35的压迫面351与乳房载置台33的载置面331所成的角度(以下,称为倾斜角度)θ。倾斜角度θ在0度至90度的范围内变化。压迫板倾斜机构37例如由齿轮、步进马达、带式输送机以及丝杠等实现,与压迫板35连接。压迫板倾斜机构37也可以被称为倾斜角度调整机构。
图3是表示压迫板35、压迫板移动机构36及压迫板倾斜机构37的结构的一例的图。在图3所示的一例中,压迫板移动机构36安装于支承臂31,能够沿Z方向相对于支承臂31移动。压迫板倾斜机构37由2根连接部件及与连接部件分别连接的马达构成。连接部件分别安装于一端被收容于压迫板移动机构36的内部的马达。连接部件的另一端在关于Y方向而远离的位置被安装于压迫板35。因此,压迫板35经由压迫板倾斜机构37与压迫板移动机构36连接。通过压迫板移动机构36,压迫板35和压迫板倾斜机构37一起在沿着Z方向接近或远离乳房载置台33的方向上移动。另外,连接部件分别能够相对于压迫板移动机构36沿Z方向移动。通过2根连接部件相对于压迫板移动机构36独立地移动,压迫板35的倾斜角度θ变化。
另外,压迫板35也可以经由压迫板移动机构36与压迫板倾斜机构37连接。在该情况下,在支承臂31上安装压迫板倾斜机构37,压迫板移动机构36安装在压迫板倾斜机构37上。另外,压迫板35安装于压迫板移动机构36。压迫板倾斜机构37使压迫板移动机构36及压迫板35一起相对于支承臂31旋转。由此,压迫板35的倾斜角度θ变化,并且基于压迫板移动机构36的压迫板35的移动方向从Z方向变化。而且,压迫板移动机构36使压迫板35相对于压迫板倾斜机构37及支承臂31向接近或远离乳房载置台33的方向移动。
操作面板38是用于输入压迫板35在Z方向上的移动、压迫板35的倾斜角度的目标值θX、与摄影单元30的转动有关的指示等的输入装置。
控制台装置50具备存储器51、显示器52、输入接口53以及处理电路54。另外,控制台装置50设为摄影装置10分体而进行说明,但也可以在摄影装置10中包含控制台装置50或控制台装置50的各结构要素的一部分。
另外,以下,设为控制台装置50以单一的控制台执行多个功能的情况进行说明,但也可以设为由不同的控制台来执行多个功能。例如,后述的图像生成功能545等处理电路54的功能也可以分散搭载于不同的控制台装置。
存储器51是存储各种信息的HDD(Hard Disk Drive:硬盘驱动器)、SSD(SolidState Drive:固态驱动器)、集成电路等存储装置。另外,存储器51除了HDD、SSD等以外,也可以是CD(Compact Disc)、DVD(Digital Versatile Disc)、闪存等可移动性存储介质。此外,存储器51也可以是在其与闪存、RAM(Random Access Memory:随机存取存储器)等半导体存储元件等之间读写各种信息的驱动装置。另外,存储器51的保存区域可以在乳房X射线照相装置1内,也可以在通过网络连接的外部存储装置内。
存储器51例如存储X射线图像、由处理电路54执行的程序、以及在处理电路54的处理中使用的各种数据等。存储器51是存储部的一例。
显示器52显示各种信息。例如,显示器52输出由处理电路54生成的医用图像(X射线图像)、用于受理来自操作者的各种操作的GUI(Graphical User Interface)等。例如,显示器52是液晶显示器、CRT(Cathode Ray Tube:阴极射线管)显示器。另外,显示器52是显示单元的示例。另外,显示器52也可以设置于支承单元20以及摄影单元30等。另外,显示器52既可以是台式,也可以由能够与控制台装置50主体进行无线通信的平板终端等构成。
输入接口53受理来自操作者的各种输入操作,将所受理的输入操作变换为电信号并输出至处理电路54。例如,输入接口53从操作者受理被检体信息、摄影条件、各种命令信号的输入等。例如,输入接口53通过用于进行支承臂31的旋转指示、X射线照射范围的设定、X射线摄影的执行以及处理电路54的各种处理等的轨迹球、鼠标、键盘、开关、按钮、操纵杆、通过与操作面接触而进行输入操作的触摸板、将显示画面与触摸板一体化的触摸面板显示器、以及脚踏开关等来实现。另外,输入接口53是输入部及操作部的一例。另外,输入接口53也可以设置于支承单元20以及摄影单元30等。另外,输入接口53也可以由能够与控制台装置50主体进行无线通信的平板终端等构成。另外,输入接口53不仅限于鼠标、键盘等具备物理的操作部件的接口。例如,从与装置分体设置的外部的输入设备接收与输入操作对应的电信号,并将该电信号向处理电路54输出的电信号的处理电路也包含在输入接口53的例子中。输入接口53是操作部的一例。
处理电路54控制乳房X射线照相装置1整体的动作。处理电路54是通过调用并执行存储器51内的程序来执行系统控制功能541、倾斜角度决定功能542、驱动控制功能543、X射线控制功能544、图像生成功能545以及显示控制功能546的处理器。
另外,在图1中,设为由单一的处理电路54实现系统控制功能541、倾斜角度决定功能542、驱动控制功能543、X射线控制功能544、图像生成功能545以及显示控制功能546而进行了说明,但也可以将多个独立的处理器组合而构成处理电路,通过各处理器执行程序来实现各功能。另外,系统控制功能541、倾斜角度决定功能542、驱动控制功能543、X射线控制功能544、图像生成功能545以及显示控制功能546也可以分别称为系统控制电路、倾斜角度决定电路、驱动控制电路、X射线控制电路、图像生成电路以及显示控制电路,也可以作为单独的硬件电路来安装。
在上述说明中使用的“处理器”这样的语句例如是指CPU(Central ProcessingUnit:中央处理单元)、GPU(Graphics Processing Unit:图形处理单元)、或者ASIC、可编程逻辑器件(例如,简单可编程逻辑器件(Simple Programmable Logic Device:SPLD)、复合可编程逻辑器件(Complex Programmable Logic Device:CPLD)、以及现场可编程门阵列(Field Programmable Gate Array:FPGA)等电路。处理器通过读出并执行存储器51中保存的程序来实现功能。另外,也可以代替在存储器51中保存程序,而构成为在处理器的电路内直接编入程序。在该情况下,处理器通过读出并执行编入到电路内的程序来实现功能。另外,本实施方式的各处理器不限于按每个处理器构成为单一的电路的情况,也可以将多个独立的电路组合而构成1个处理器,实现其功能。进而,也可以将图1中的多个结构要素综合到1个处理器来实现其功能。上述“处理器”的说明在以下的各实施方式以及变形例中也相同。
处理电路54通过系统控制功能541,基于经由输入接口53从操作者受理的输入操作,对乳房X射线照相装置1中的多个结构要素分别进行控制。例如,处理电路54根据摄影条件来控制摄影装置10中的各种结构要素。实现系统控制功能541的处理电路54是系统控制部的一例。
处理电路54通过倾斜角度决定功能542,根据摄影角度α来决定压迫板35的倾斜角度的目标值θX。即,处理电路54根据乳房载置台33的倾斜角度来决定压迫板35的倾斜角度。具体而言,处理电路54根据载置面331相对于水平面的角度,决定压迫板35的倾斜角度的目标值θX。此时,处理电路54在摄影角度α为第一角度的情况下,将倾斜角度的目标值θX设定为第一值,在摄影角度α为比第一角度大的第二角度的情况下,将倾斜角度的目标值θX设定为第一值以上的第二值。即,处理电路54随着摄影角度α变大,将倾斜角度的目标值θX决定为较大的值。实现倾斜角度决定功能542的处理电路54是倾斜角度决定部的一例。
处理电路54例如基于对摄影角度α与倾斜角度的目标值θX的关系进行表示的对应表来决定倾斜角度的目标值θX。对摄影角度α与倾斜角度的目标值θX的关系进行表示的对应表是例如查找表。对摄影角度α与倾斜角度的目标值θX的关系进行表示的对应表例如存储于存储器51。图4是表示对摄影角度α与倾斜角度的目标值θX的关系进行表示的对应表的一例的图。在图4的一例中,θ8为θ7以上的值,θ7为θ6以上的值,θ6为θ5以上的值,θ5为θ4以上的值,θ4为θ3以上的值,θ3为θ2以上的值,θ2为θ1以上的值。
处理电路54通过驱动控制功能543,例如基于从输入接口53输入的与各种驱动部的驱动有关的信息,进行该各驱动部的控制。具体而言,处理电路54控制用于使支承轴40转动的旋转驱动部41、以及用于使乳房载置台33移动的驱动部。另外,处理电路54通过基于倾斜角度的目标值θX来控制压迫板移动机构36和压迫板倾斜机构37,来控制压迫板35的位置、压迫板35的倾斜角度θ、以及压迫板35在其与乳房载置台33之间压迫乳房的压力(以下,称为压迫压力)。实现驱动控制功能543的处理电路54是驱动控制部的一例。另外,处理电路54控制压迫板35的驱动,以使被载置于通过支承臂31而倾斜的乳房载置台33上的乳房从下方被支承的同时被压迫。具体而言,处理电路54控制压迫板35的驱动,以在压迫板35的倾斜角度大于乳房载置台33的倾斜角度、并且下方的压迫板35与乳房载置台33之间的距离比上方小的状态下压迫乳房。
处理电路54通过X射线控制功能544,例如读入来自系统控制功能541的信息,进行高电压发生装置25中的管电流、管电压、焦点尺寸、照射时间、脉冲宽度、X射线照射范围等X射线条件的控制。实现X射线控制功能544的处理电路54是X射线控制部的一例。
处理电路54通过图像生成功能545例如基于从X射线检测器34输出的数据生成X射线图像。另外,处理电路54也可以对所生成的X射线图像进行各种合成处理或减法(减影)处理等。实现图像生成功能545的处理电路54是图像生成部的一例。
处理电路54通过显示控制功能546,例如读入来自系统控制功能541的信号,从存储器51取得期望的X射线图像并显示于显示器52。实现显示控制功能546的处理电路54是显示控制部的一例。
接着,对由乳房X射线照相装置1执行的定位执行处理的动作进行说明。定位执行处理是指,在MLO摄影中的乳房的定位中,在抑制乳房因自重从正确的位置偏离的状态下,在乳房载置台33与压迫板35之间压迫乳房的处理。另外,以下说明的定位执行处理中的处理顺序只不过是一例,各处理在可能的范围内能够进行适当变更即可。另外,关于以下说明的处理顺序,能够根据实施方式适当地进行步骤的省略、置换以及追加。
图5是表示本实施方式的定位执行处理的顺序的一例的流程图。定位执行处理在摄影单元30旋转到MLO摄影中的摄影角度α、患者的乳房B载置于乳房载置台33的载置面331上、且通过诊疗放射线工程师的手将乳房B朝向乳房载置台33按压的状态下执行。处理电路54例如基于由诊疗放射线技师在输入接口53或操作面板38中输入了使定位执行处理开始的指示这一情况,开始定位执行处理。诊疗放射线技师是操作者的一例。图6是表示MLO摄影的情形的立体图,表示在乳房载置台33的载置面331上载置有患者的乳房B的情形。另外,图7至图10是用于说明定位执行处理的顺序的概略图。在图7中,用在X射线检测器34的检测面的中心和X射线产生部32通过、并与支承臂31的旋转轴垂直的截面表示在MLO摄影中将患者的乳房B载置于乳房载置台33的载置面331上的状态。
(定位执行处理)
(步骤S101)
处理电路54通过倾斜角度决定功能542取得摄影角度α。处理电路54例如通过取得从输入接口53输入的摄影方法,取得摄影角度α。
(步骤S102)
处理电路54通过倾斜角度决定功能542,基于取得的摄影角度α和表示倾斜角度的目标值与摄影角度的关系的对应表,决定倾斜角度的目标值θX。
(步骤S103)
处理电路54通过驱动控制功能543控制压迫板移动机构36及压迫板倾斜机构37,如图8所示,使压迫板35相对于乳房载置台33的载置面331倾斜,直到倾斜角度θ成为目标值θX为止。图8用在X射线检测器34的检测面的中心和X射线产生部32通过、并与支承臂31的旋转轴垂直的截面,表示从图7所示的状态起压迫板35倾斜直到倾斜角度θ成为目标值θX为止的状态。
(步骤S104)
处理电路54通过驱动控制功能543,使压迫板35的向接近乳房载置台33的方向的移动开始。压迫板35以压迫面351相对于载置面331倾斜至倾斜角度的目标值θX的状态下,逐渐接近乳房载置台33。并且,随着压迫板35接近乳房载置台33,压迫面351与载置面331的距离L变小。
若压迫板35接近乳房载置台33,则如图9所示,首先,压迫板35的压迫面351的下方部位从上侧与载置于乳房载置台33上的乳房B接触。在图9中,用在X射线检测器34的检测面的中心和X射线产生部32通过、并与支承臂31的旋转轴垂直的截面表示从图8所示的状态起压迫板35接近乳房载置台33、而压迫面351的下端与乳房B接触的状态。
随着压迫板35进一步接近乳房载置台33,如图10所示,压迫面351中的与乳房B的接触面积增加,并且压迫压力变大,乳房B朝向载置面331扩张。然后,当乳房B被充分压迫时,诊疗放射线技师判断为乳房B的定位完成,例如,在输入接口53或操作面板38中输入使压迫板35的移动停止的指示。在图10中,用在X射线检测器34的检测面的中心和X射线产生部32通过、并与支承臂31的旋转轴垂直的截面表示从图9所示的状态起压迫板35向接近乳房载置台33的方向移动、而乳房B被充分压迫的状态。
(步骤S105)
处理电路54通过驱动控制功能543判断是否输入了使压迫板35的移动停止的指示。在没有输入使压迫板35的移动停止的指示的情况下(步骤S105-否),处理电路54待机直到输入使压迫板35的移动停止的指示为止,继续使压迫板35接近乳房载置台33的处理。在输入了使压迫板35的移动停止的指示的情况下(步骤S105-是),处理进入到步骤S106。
(步骤S106)
处理电路54通过驱动控制功能543使压迫板35的向接近乳房载置台33的方向的移动停止,结束定位执行处理。
当定位执行处理结束时,诊疗放射线技师对载置于乳房载置台33上并被压迫板35压迫的乳房B进行X射线摄影,取得乳房B的X射线图像。
以下,对本实施方式的乳房X射线照相装置1的效果进行说明。
本实施方式的乳房X射线照相装置1具备:X射线管,产生X射线;X射线检测器34,检测从X射线管照射的X射线;乳房载置台33,具有供被检体的乳房载置的载置面331,支承乳房;压迫板35,设置于X射线管与乳房载置台33之间,能够在与载置面331正交的第一方向上移动,具有与载置面331对置的压迫面351,能够在压迫面351与载置面331之间压迫乳房;压迫板移动机构36,使压迫板35在第一方向移动;压迫板倾斜机构37,调整压迫板35在第二方向上的相对于载置面331的倾斜角度θ;以及支承臂31,在载置面331相对于水平面倾斜的状态下支承X射线管、乳房载置台33、X射线检测器34以及压迫板35。压迫板35通过倾斜角度的调整,以相对于第一方向正交且在与被检体的胸壁平行的第二方向上相对于载置面331倾斜的状态,向接近载置面331的方向移动,由此与载置面331协作而从下方支承乳房,并且在压迫板35与载置面331之间压迫乳房B。
在此,第二方向是与将X射线产生部32和X射线检测器34连结的直线正交的方向。另外,载置面331是与被检体的胸壁正交的平面。
另外,在本实施方式的乳房X射线照相装置1中,压迫板35以随着朝向下侧而与载置面331之间接近的状态下,向接近载置面331的方向移动。
此外,Z方向相当于第一方向,Y方向相当于第二方向。
即,通过上述的结构以及动作,根据本实施方式的乳房X射线照相装置1,以在从正面(患者侧)观察时的左右方向上使压迫板35倾斜的状态,压迫板35朝向乳房载置台33移动,从而压迫面351能够在与乳房的接触部分从下侧支承乳房,并且能够在压迫面351与载置面331之间压迫乳房。因此,在定位时乳房难以因自重而下落,能够抑制乳房因自重而从正确的位置偏移。而且,通过抑制乳房因自重而从正确的位置偏移,从而X射线图像的画质提高。另外,通过抑制乳房因自重而从正确的位置偏移,能够减少诊疗放射线技师用手压迫乳房的力,能够减轻诊疗放射线技师的疲劳。
另外,本实施方式的乳房X射线照相装置1具备设置于检查室的地面或壁面并支承支承臂31的支承单元20。支承臂31以与第一方向及第二方向正交的旋转轴为中心相对于支承单元20旋转。另外,本实施方式的乳房X射线照相装置1,根据摄影角度α来决定倾斜角度的目标值θX,例如,在摄影角度α为第一角度的情况下,能够将倾斜角度的目标值θX设定为第一值,在摄影角度α为比第一角度大的第二角度的情况下,能够将倾斜角度的目标值θX设定为第一值以上的第二值。在此,支承单元20相当于支承台,支承轴40的中心轴R相当于旋转轴,摄影角度α相当于载置面331相对于水平面的角度。
即,通过上述的结构和动作,根据本实施方式的乳房X射线照相装置1,能够在X射线摄影中的摄影单元30的旋转角度越大、则使压迫板35相对于乳房载置台33倾斜越大的状态下,进行载置于乳房载置台33上的乳房的定位。由此,X射线摄影时的乳房载置台33的载置面331的倾斜所引起的对乳房的定位的影响越大,能够使增大压迫板35相对于乳房载置台33的倾斜角度越大,能够有效地抑制乳房因自重而从正确的位置偏移。
(第二实施方式)
对第二实施方式进行说明。本实施方式如下那样对第一实施方式的结构进行了变形。在本实施方式中,乳房X射线照相装置1根据压迫板35与乳房载置台33的距离,调整压迫板35的倾斜角度θ。对于与第一实施方式相同的结构、动作以及效果,省略说明。
处理电路54通过驱动控制功能543,随时间经过地取得压迫板35的压迫面351与乳房载置台33的载置面331的距离L。此时,处理电路54例如基于与压迫板移动机构36的移动驱动部的驱动状态以及乳房载置台33的驱动部的驱动状态有关的信息来计算距离L,由此取得距离L。
处理电路54通过驱动控制功能543,根据距离L来控制压迫板35的倾斜角度θ。图11是表示执行定位执行处理时的距离L与倾斜角度θ的关系的图。在图11中,横轴表示距离L,纵轴表示倾斜角度θ。处理电路54首先判断压迫板35的压迫面351与乳房载置台33的载置面331的距离L是否大于第一阈值Lth1。在距离L大于第一阈值Lth1的情况下,处理电路54在压迫板35的倾斜角度θ为目标值θX的状态下使压迫板35朝向乳房载置台33移动。另一方面,在距离L为第一阈值Lth1以下的情况下,处理电路54在倾斜角度θ小于目标值θX的状态下使压迫板35朝向乳房载置台33移动。第一阈值Lth1例如是30mm~50mm的范围内的值。第一阈值Lth1例如存储于存储器51中。
另外,处理电路54控制压迫板移动机构36和压迫板倾斜机构37,以使得在距离L为第二阈值Lth2的情况下倾斜角度θ为0。处理电路54在距离L为第二阈值Lth2以下的情况下,在压迫板35的倾斜角度θ为0的状态下使压迫板35朝向乳房载置台33移动。第二阈值Lth2是小于第一阈值Lth1的值。第二阈值Lth2例如是10mm~30mm的范围内的值。第二阈值Lth2例如存储于存储器51中。
以下,对由乳房X射线照相装置1执行的定位执行处理的动作进行说明。图12是表示本实施方式的定位执行处理的步骤的一例的流程图。图12中的步骤S201~步骤S204以及步骤S208~步骤S209的处理分别与第一实施方式中的步骤S101~步骤S106的处理相同,因此省略说明。图13是表示从定位执行处理的开始起经过的时间(以下,称为经过时间)T与倾斜角度θ的关系的图。在图13中,横轴表示经过时间T,纵轴表示倾斜角度θ。
(定位执行处理)
(步骤S205)
处理电路54通过驱动控制功能543取得压迫板35的压迫面351与乳房载置台33的载置面331的距离L。
(步骤S206)
处理电路54通过驱动控制功能543,判断距离L是否为第一阈值Lth1以下。在距离L不为规定的第一阈值Lth1以下的情况下,即,在距离L大于第一阈值Lth1的情况下(步骤S206-否),处理电路54在压迫板35的倾斜角度θ为目标值θX的状态下使压迫板35朝向乳房载置台33移动,直到距离L成为第一阈值Lth1以下为止。在距离L为第一阈值Lth1以下的情况下(步骤S206-是),处理进入到步骤S207。
(步骤S207)
处理电路54通过驱动控制功能543使压迫板35朝向乳房载置台33移动,并且使压迫板35的倾斜角度θ逐渐变小。因此,在距离L为第一阈值Lth1以下的情况下,倾斜角度θ比目标值θX小。并且,在距离L为第二阈值Lth2以下的情况下,处理电路54在倾斜角度θ为0的状态下,使压迫板35朝向乳房载置台33移动。
以下,对本实施方式的乳房X射线照相装置1的效果进行说明。在本实施方式中,除了与第一实施方式的效果相同的效果之外,还能够得到以下的效果。
例如,在摄影对象是大的乳房的情况下,容易发生因自重引起的位置偏移。另外,在摄影对象为大的乳房的情况下,在距离L大于第一阈值Lth1的状态下,载置于乳房载置台33上的乳房与压迫板35接触。在距离L为第一阈值Lth1以下且大于第二阈值Lth2的状态下,乳房被压迫板35压迫,并且诊疗放射线技师使固定乳房的手退避。并且,在距离L为第二阈值Lth2以下的状态下,乳房成为被充分压迫的状态。
另一方面,在摄影对象为小的乳房的情况下,不易发生因自重引起的位置偏移。另外,在摄影对象为小的乳房的情况下,在距离L为第一阈值Lth1以下且大于第二阈值Lth2的状态下,载置于乳房载置台33上的乳房与压迫板35接触。在距离L为第二阈值Lth2以下的状态下,乳房被压迫板35压迫,并且诊疗放射线技师使固定乳房的手退避。
本实施方式的乳房X射线照相装置1,基于目标值θX来控制压迫板倾斜机构37的驱动以及压迫板移动机构36的驱动,在压迫板35与乳房载置台33的距离L大于第一阈值Lth1的情况下,在倾斜角度θ为目标值θX的状态下使压迫板35朝向乳房载置台33移动,在距离L为第一阈值Lth1以下的情况下,在倾斜角度θ小于目标值θX的状态下,使压迫板35朝向乳房载置台33移动。在此,第一阈值Lth1相当于规定的值。
即,通过上述的结构以及动作,根据本实施方式的乳房X射线照相装置1,在摄影对象为大的乳房的情况下,在距离L为第一阈值Lth1以下且大于第二阈值Lth2的情况下,在倾斜角度θ为目标值θX的状态下通过压迫板35压迫乳房。在该情况下,与第一实施方式同样地,乳房因自重而从正确的位置偏移的情况得到抑制。另一方面,在摄影对象为小的乳房的情况下,在距离L为第二阈值Lth2以下的情况下,在倾斜角度θ为0的状态下通过压迫板35压迫乳房。因此,在如摄影对象是较大的乳房的情况那样容易发生因自重引起的位置偏移的情况下,通过使压迫板35相对于乳房载置台33倾斜地进行定位,从而抑制乳房的从正确的位置的偏移,在如摄影对象是较小的乳房的情况那样不易发生因自重而引起的位置偏移的情况下,通过不使压迫板35相对于乳房载置台33倾斜地进行定位,从而能够提高X射线摄影的精度。
另外,也可以代替压迫板35与乳房载置台33的距离L,而使用对乳房的压力。在该情况下,检测作用于乳房的压力的压力传感器例如设置于压迫板35。处理电路54通过驱动控制功能543取得由压力传感器检测出的压力,在由压力传感器检测出的压力成为规定值的情况下,控制压迫板35的驱动,以使压迫板35的倾斜角度与乳房载置台33的倾斜角度一致。具体而言,处理电路54在由压力传感器检测出的压力为规定值以上的情况下,使压迫板35的倾斜角度θ为0。压迫板35的倾斜角度θ为0时,压迫板35相对于水平面的倾斜角度与乳房载置台33相对于水平面的倾斜角度一致。在该状态下,处理电路54使压迫板35朝向乳房载置台33移动。
(第三实施方式)
对第三实施方式进行说明。本实施方式如下那样对第一实施方式的结构进行了变形。在本实施方式中,乳房X射线照相装置1具备检测从乳房B作用于压迫板35的压力的压力传感器,通过基于压力传感器的压力的检测结果来调整压迫板35的倾斜角度θ,由此控制压迫压力。对于与第一实施方式相同的结构、动作以及效果,省略说明。
图14是例示第三实施方式的乳房X射线照相装置1的结构的图。如图14所示,在压迫板35上安装有传感器39A和传感器39B。传感器39A是安装于压迫板35的下方位置,并检测作用于压迫面351的下方位置的压力P1的压力传感器。传感器39B是安装在压迫板35的上方位置,并检测作用于压迫面351的上方位置的压力P2的压力传感器。压力P1和压力P2被发送至处理电路54。
处理电路54通过驱动控制功能543,根据传感器39A以及传感器39B的检测结果,判断载置于乳房载置台33上的乳房B是否与压迫板35接触。而且,处理电路54根据乳房B与压迫板35的接触状态,控制压迫板35的倾斜角度θ,由此控制作用于乳房B的压迫压力。具体而言,处理电路54在由传感器39A检测出的压力P1或由传感器39B检测出的压力P2大于规定值的情况下,使压迫板35朝向乳房载置台33移动并且使压迫板35的倾斜角度θ逐渐增大后,使倾斜角度θ逐渐变小。规定的值例如是0[N]。规定的值例如存储于存储器51中。规定的值也可以是0以上的值。
以下,对由乳房X射线照相装置1执行的定位执行处理的动作进行说明。图15是表示本实施方式的定位执行处理的顺序的一例的流程图。图15中的步骤S301~步骤S304以及步骤S308~步骤S309的处理分别与第一实施方式中的步骤S101~步骤S106的处理相同,因此省略说明。图16是表示定位执行处理中的经过时间T与由传感器39A检测出的压力P1以及由传感器39B检测出的压力P2之间的关系的图。在图16中,横轴表示经过时间T,纵轴表示压力。
(定位执行处理)
(步骤S304)
处理电路54通过驱动控制功能543,使压迫板35的向接近乳房载置台33的方向的移动开始。压迫板35在压迫面351的倾斜角度θ为0的状态下,即压迫面351相对于载置面331不倾斜的状态下,逐渐接近乳房载置台33。并且,随着压迫板35接近乳房载置台33,压迫面351与载置面331的距离L变小。当压迫板35接近乳房载置台33时,压迫板35的压迫面351从上侧与载置于乳房载置台33上的乳房B接触。在压迫板35与乳房B接触之前,压力P1和压力P2为0。
(步骤S305)
处理电路54通过驱动控制功能543,取得由传感器39A检测出的压力P1和由传感器39B检测出的压力P2。
(步骤S306)
处理电路54通过驱动控制功能543判断压力P1是否大于0。在压力P1不为0以上的情况下,即,在压力P1为0的情况下(步骤S306-否),处理电路54判断为乳房B未与压迫板35接触,在压迫板35的倾斜角度θ为0的状态下使压迫板35朝向乳房载置台33移动,直到压力P1成为大于0的值为止。在压力P1大于0的情况下(步骤S306-是),处理电路54判断为乳房B与压迫板35接触,处理进入到步骤S307。
(步骤S307)
处理电路54通过驱动控制功能543使压迫板35朝向乳房载置台33移动,并且使倾斜角度θ逐渐变大。若倾斜角度θ逐渐变大,则与压迫板35的上方部位相比,压迫板35的下方部位逐渐接近乳房载置台33。乳房B在压迫板35与乳房载置台33之间,与上方位置相比,在下方部位更大地被压迫。因此,压力P1比压力P2大。另外,每单位时间的压力P1的增加量比每单位时间的压力P2的增加量大。
当倾斜角度θ达到目标值θX时,处理电路54使压迫板35朝向乳房载置台33移动,并且使倾斜角度θ逐渐变小。当倾斜角度θ逐渐变小时,压迫板35的上方部位和下方部位中的与乳房载置台33的距离之差变小。因此,压力P1与压力P2之差逐渐变小。然后,若进一步经过规定的时间,则处理电路54使倾斜角度θ为0。当倾斜角度θ为0时,压迫板35成为相对于乳房载置台33不倾斜的状态,压力P1和压力P2大致相同。此外,也可以代替使用倾斜角度θ的目标值θX,例如根据压力P1、距离L或者经过时间T的值来控制倾斜角度θ。
以下,对本实施方式的乳房X射线照相装置1的效果进行说明。在本实施方式中,除了与第一实施方式的效果相同的效果之外,还能够得到以下的效果。
本实施方式的乳房X射线照相装置1具备对作用于压迫面351或者载置面331的压力进行检测的传感器39A、39B,在由传感器39A、39B检测出的压力P1、P2比规定的值大的情况下,能够在使压迫板35朝向乳房载置台33移动并且使倾斜角度θ逐渐增大之后,使倾斜角度θ逐渐变小。
即,通过上述结构和动作,根据本实施方式的乳房X射线照相装置1,当载置在乳房载置台33上的乳房与压迫板35接触时,压迫板35相对于乳房载置台33倾斜。而且,在压迫板35相对于乳房载置台33倾斜的状态下压迫板35朝向乳房载置台33移动,从而压迫面351在与乳房的接触部分从下侧支承乳房,并且在下方部位的压迫压力大于上方部位的压迫压力的状态下压迫乳房。因此,能够得到与第一实施方式的效果相同的效果。
另外,通过上述的结构和动作,根据本实施方式的乳房X射线照相装置1,在压迫板35相对于乳房载置台33未倾斜的状态下,X射线照射到乳房,能够执行X射线摄影。即,能够在被压迫的乳房的厚度均匀的状态下执行X射线摄影。由此,能够抑制乳房中的X射线的照射量的由压迫位置引起的差,能够提高通过X射线摄影而生成的X射线图像的画质。
另外,乳房X射线照相装置1只要能够基于作用于乳房B的压迫压力,来判断是否处于被载置于乳房载置台33上的乳房B被压迫的状态即可。例如,设置于乳房X射线照相装置1的传感器也可以是1个。在该情况下,传感器例如检测作用于压迫板35的转矩。处理电路54基于传感器的检测结果,判断乳房B是否与压迫板35接触。在判断为乳房B与压迫板35接触的情况下,处理电路54按照存储于存储器51的规定的控制流程,控制压迫板35的倾斜角度θ,由此控制作用于乳房B的压迫压力。
另外,传感器也可以安装于乳房载置台33。在该情况下,传感器检测作用于乳房载置台33的载置面331的压力。处理电路54基于由传感器检测出的压力的值,判断乳房是否被压迫。
(第一实施方式至第三实施方式的应用例)
第一实施方式至第三实施方式中的乳房X射线照相装置1的结构也能够应用于进行MLO摄影的乳房X射线照相装置以外。MLO摄影是在摄影方向从水平面倾斜的状态下进行摄影的摄影方法的一例。只要是在从水平面倾斜的状态下进行乳房的定位的乳房X射线照相装置,则能够应用在第一实施方式至第三实施方式中说明的结构。
根据以上说明的至少1个实施方式,在乳房的定位时,能够抑制乳房因自重而从正确的位置偏移。
以上,说明了本发明的几个实施方式,但这些实施方式是作为例子提示的,并不意图限定发明的范围。这些新的实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更等。这些实施方式及其变形例包含在发明的范围及主旨内,并且包含在权利要求书所记载的发明及其等同的范围内。
- 在进行乳房X射线照相时改进的乳房支承装置
- 用于乳房X射线照相术和断层融合技术的超便携式装置