一种面向空间应用的参考腔腔前耦合光路及调节方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明属于窄线宽激光器领域,涉及一种耦合光路。
背景技术
具有极高频率稳定度和极窄激光线宽的窄线宽激光器在原子光钟、引力波探测、精密光谱测量等领域有着重要的应用前景。特别是随着空间科学的快速发展,空间光钟、空间引力波探测等对面向空间应用的窄线宽激光器的需求日益迫切。实现窄线宽激光器最常用的方法是基于超稳光学参考腔的Pound-Drever-Hall(PDH)激光稳频技术,目前利用该方法实现的窄线宽激光器的激光频率稳定度已经达到10
图1是PDH稳频的基本原理,实线代表激光传输方向,虚线代表电子学信号的传输方向。激光器出射激光经过电光相位调制器进行相位调制后,耦合入光学参考腔。由于光学参考腔及外围真空系统的体积较大,参考腔光轴一般与激光器出射激光不在同一平面,通常需要将经过相位调制的激光(也可以是未经过相位调制的激光,这种情况需要在耦合光路中再对激光进行相位调制)耦合入光纤跳线中,然后将跳线的另一端连接到与参考腔光轴处于同一平面(也可以是与参考腔光轴垂直的平面,然后增加一个与耦合光路平面成45°的反射镜将激光反射至光学参考腔)的耦合光路中的光纤准直器。然后通过一对二维调节的反射镜将激光耦合入光学参考腔。
基于光学参考腔的PDH激光稳频是将激光频率锁定在光学参考腔的谐振频率,而参考腔有不同的模式,不同的模式对应着不同的谐振频率。通常是将激光频率锁定在参考腔的TEM
为了使激光指向与参考腔光轴重合,通常使用一对反射镜来对激光指向进行平移及角度的调节。反射镜一般是固定于光学调整架上,通过调整架上的螺钉来改变反射镜的俯仰角,从而改变激光光束的方向,将激光耦合入光学参考腔。由于光学参考腔与光学调整架一般为分离的结构,且光学调整架为活动部件,仅依靠弹簧的拉力来维持反射镜的角度,对于面向空间应用的窄线宽激光器,因发射过程中需经历复杂的振动环境,激光指向与参考腔光轴难免发生相对位移,导致在轨运行后PDH鉴频信号的信噪比降低,及系统的锁定质量变差,进而导致输出激光的稳定性降低。
发明内容
为了克服现有技术的不足,本发明提供一种面向空间应用的参考腔腔前耦合光路,在空间环境等力学环境复杂的应用中有效降低激光指向与参考腔的相对位移,即使发生了相对位移,也能够根据远程指令进行精密调节,从而对系统进行恢复。
本发明解决其技术问题所采用的技术方案是:一种面向空间应用的参考腔腔前耦合光路,包括光纤准直器、匹配透镜、分束棱镜、反射镜和光楔。
所述的光纤准直器带有尾纤,经相位调制的激光被耦合入光纤准直器,光纤准直器的出射激光经匹配透镜进行高斯光束变换后,由分束棱镜分为两束,其中一束入射到一号光电探测器进行激光功率的监视和稳定控制,另一束通过两个光楔组后经偏振分束棱镜和1/4玻片由反射镜反射进入光学参考腔,每个光楔分别通过电机控制进行旋转,反射镜将激光反射至与光路垂直的方向,光学参考腔视角为沿光轴方向;由光学参考腔反射回的激光再次经过1/4玻片和偏振分束棱镜,进入二号光电探测器。
所述的经相位调制的激光通过光纤输入,光纤通过光纤法兰与带尾纤的准直器连接。
对于未经过相位调制的入射激光,在耦合光路中对激光进行相位调制。
所述光楔的楔角范围为0.05°到0.5°。
所述光楔的参数相同或在同一数量级以内,所述参数包括光楔直径和楔角。
同一光楔组内光楔的距离小于10mm。
两个光楔组之间的距离小于20cm。
所述光楔的旋转步进小于0.1度。
所述的光楔组由两个光楔组成,单个光楔为圆形,两个光楔保持同轴。
本发明还提供上述面向空间应用的参考腔腔前耦合光路的调节方法,包括以下步骤:
a)沿激光传递的方向,旋转第一个光楔;根据参考腔后探测器探测到的电压值,判断光楔旋转方向正确与否,若电压值变大,则说明光楔的旋转方向正确,若电压值变小,则改变旋转方向;
b)旋转第三个光楔,直至参考腔后探测器探测到的电压值达到最大值;然后重复旋转第一个光楔,直至电压值达到最大值;之后再次旋转第三个光楔,如此往复,直至将电压值调至最大;
c)旋转第二个光楔,直至参考腔后探测器探测到的电压值达到最大值;然后旋转第四个光楔,直至电压值达到最大值;之后再次旋转第二个光楔,如此往复,直至将电压值调至最大;
d)重复步骤a)、b)、c),直至将电压值调至最大,则表明此时的耦合效率已调至最大。
本发明的有益效果是:能够有效解决参考腔耦合光路中激光指向与参考腔光轴的重合度易受环境振动影响而发生相对变化的问题,同时能够作为空间应用的一种解决方案,且能够通过远程指令来进行光束指向的调节。
本发明使用一体化光纤准直器,相比分离的光纤跳线和光纤准直器,本发明只需将外部激光通过光纤法兰与尾纤直接相连,无需光纤跳线与光纤准直器间的插拔,也就避免了每次插拔导致的激光指向的变化,及频繁的耦合光路调节,且该结构更加稳定,能够承受更大的环境振动。
本发明通过四个螺钉将完全固定的反射镜支架与光路板进行紧固连接,可以避免使用活动部件,大大增加系统应对各类环境振动的可靠性。
光楔组的加入为远程调控激光指向提供了便捷。一个光楔组只能实现光束的角度变化,无法对其进行平移。本发明中光楔1和光楔3配合调节,光楔2和光楔4配合调节,能够使激光指向在小范围内同时实现平移及角度变化,以应对经历剧烈环境振动导致的激光指向与参考腔光轴的相对变化,同时该方法可以实现对光束指向的远程控制,可以为空间应用及现场无人操作时提供有效的操作余量。
附图说明
图1是PDH稳频基本原理图;
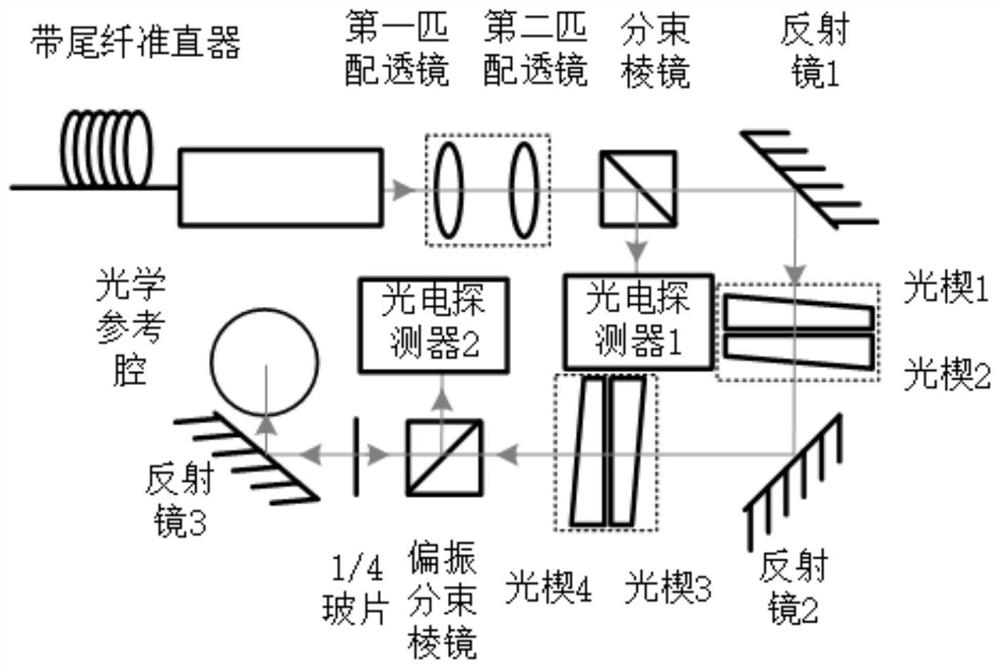
图2是参考腔耦合光路示意图;
图3是全固定反射镜支架结构示意图。
具体实施方式
下面结合附图和实施例对本发明进一步说明,本发明包括但不仅限于下述实施例。
本发明提出的一种面向空间应用的参考腔耦合光路,是面向空间应用的窄线宽激光器不可或缺的重要组成光路,是远程提高激光与参考腔耦合效率的关键技术。
本发明所描述的参考腔耦合光路如图2所示,经相位调制的激光首先会被耦合入一个带尾纤的光纤准直器,将输出激光的光纤通过光纤法兰与图2中带尾纤的准直器连接,出射激光经第一匹配透镜和第二匹配透镜进行高斯光束变换后,由分束棱镜分为两束,一束入射到光电探测器1进行激光功率的监视和稳定控制,另一束经反射镜1反射通过光楔1和光楔2组成的光楔组(单个光楔为圆形,楔角范围一般为0.05°到0.5°,每个光楔的参数相同或者相近(光楔直径和楔角应在同一数量级以内,便于光楔及工装的统一设计与加工),两个光楔分别安装于一个外壳内,然后装于同一个支架,距离尽量靠近(两个光楔的距离应小于10mm,以减小光楔导致的光束指向变化),两个光楔保持同轴,每个光楔可以通过电机控制进行绕轴转动),再经反射镜2反射经过光楔3和光楔4组成的光楔组,两个光楔组之间的距离应小于20cm,距离太远会使光楔转动一次产生的光束指向变化过大,之后激光通过偏振分束棱镜和1/4玻片由反射镜3反射进入光学参考腔。其中反射镜3是将激光反射至与光路平面垂直的方向,参考腔视角为沿光轴方向。由参考腔反射回的激光再次经过1/4玻片和偏振分束棱镜,进入光电探测器2,一般光电探测器前还需一个短焦透镜将激光聚焦至光电探测器的光电二级管中。
对于未经过相位调制的入射激光,在耦合光路中对激光进行相位调制。
本发明描述的参考腔耦合光路的主要创新如下:
1)使用一体化光纤准直器,即带尾纤的光纤准直器,并将带尾纤的准直器通过支撑结构完全固定于耦合光路底板。
2)使用完全固定的反射镜支架替代光学调整架,反射镜支架如图3所示,通过点胶及螺圈挤压将反射镜完全固定于支架内。
3)增加远程调节模块,以解决系统经历振动环境后耦合效率降低的问题:两块光楔组成一个光楔组,在耦合光路中增加两个光楔组,且使用调节步进精密的电机(如超声电机)单独控制每个光楔组中光楔绕光楔组轴线的旋转角度,光楔旋转的步进小于0.1度。
所述的远程调节方法如下:
a)通过指令控制电机,沿激光传递的方向,使光楔1顺时针旋转,根据参考腔后探测器探测到的基模对应的电压值,判断光楔1旋转方向的正确与否。若电压值变大,则说明光楔1的旋转方向正确,若电压值变小,则需将光楔1的旋转方向改为逆时针。
b)顺时针旋转光楔3,若电压值变大,则继续旋转光楔3,直至电压值出现拐点又变小,然后继续按照步骤a中电压值变大的方向旋转光楔1,使电压值变大,直至再次出现拐点后又变小,之后再次以同样的方向旋转光楔3,如此往复,直至将电压值调至最大后停止旋转。若电压值变小,则逆时针旋转光楔3,按照同样的方法将电压值调至最大。
c)顺时针旋转光楔2,若电压值变大,则继续旋转光楔2,直至电压值出现拐点后又变小,然后使用与调节光学3同样的方法调节光楔4,使电压值变大并出现拐点后变小,然后继续旋转光楔2,如此往复旋转光楔2和光楔4,直至电压值最大。若电压值变小,则逆时针选装光楔2,按照同样的方法,通过光楔2和光楔4,将电压值调制最大。
d)重复步骤a)、b)、c),直至将电压值调至最大,则表明此时的耦合效率已调至最大。
4)该耦合光路与参考腔所处的真空腔室之间至少使用4个M5或更大的螺钉进行紧固连接,如此,可以减弱力学振动导致的激光指向与参考腔光轴的相对变化。
本发明的实施步骤:
1)将设计加工好的参考腔耦合光路底板完全固定于安装参考腔的真空腔室上;
2)将一体化光纤准直器(如索雷博生产的CFS11-633F型号)通过安装支架完全固定于光路底板的孔位上;并按照图2所示光路图,将其它光学元器件都完全固定于光路底板的预定孔位;其中光楔单端倾角需要选择合适的角度,角度太大则不能实现微调的目的,角度太小则调节范围不足,本发明案例中可以选择的倾角为0.1°。
3)将经过相位调制器的激光通过光纤法兰耦合至一体化光纤准直器;
4)通过反射镜1和反射镜2将激光耦合入光学参考腔。在首次调节过程中需在反射镜支架固定面的底部使用不同厚度的垫片来调整反射镜的俯仰角及左右倾角,通过反射镜1和反射镜2的配合调节,使激光耦合效率达到最高。调好后,通过统计垫片的厚度及数量计算增加垫片的厚度,将该厚度累加到反射镜支架的尺寸,重新加工反射镜支架,并将安装面进行研磨,使激光耦合效率达到最大。
5)经过剧烈振动后,如火箭发射等,激光与参考腔的耦合效率会降低,通过电机(如超声电机)的控制指令,控制两组光楔组中光楔的旋转角度,远程实现对激光耦合效率的恢复。
本发明的实施例包括以下步骤:
1)将加工好的参考腔耦合光路底板通过四个M5螺钉完全固定于安装参考腔的真空腔室上;
2)根据索雷博公司CFS11-633F型号的一体化光纤准直器输出激光特性,及其与参考腔腔镜之间的距离,计算所需的第一匹配透镜、第二匹配透镜的焦距及二者的位置,然后加工一个工装同时将一体化光纤准直器和两个匹配透镜完全固定于耦合光路底板上。
3)将三个反射镜通过3M公司的2166胶粘接于反射镜支架,并用螺圈压紧,预装于光学板的安装孔上。
4)通过在反射镜1和反射镜2支架的四个底角增加垫片的方式,使激光初步耦合入光学参考腔,通过参考腔后的相机观察到基模信号。
5)将2个光楔组和四个三阶微控公司生产的SJ-PXS-012-00型号的超声电机安装于专门设计的安装底座,并完全固定在耦合光学底板上。同时将分束棱镜、偏振分束棱镜及1/4玻片、1/2玻片固定于光路底板。
6)使10微米等厚度的垫片再次调节反射镜1和反射镜2的角度,通过参考腔后光电探测器对基模电压信号的监测,使其电压值达到最大。
7)将光电探测器1和光电探测器2完全固定于光路底板。
8)对调试好的参考腔耦合光学及参考腔等进行振动试验,并观察参考腔后探测器输出的基模电压幅值,若幅值降低,则通过指令控制超声电机,调节光楔转动角度,回复激光指向。
- 一种面向空间应用的参考腔腔前耦合光路及调节方法
- 一种面向空间应用的参考腔腔前耦合光路及调节方法