一种电感器测试包装机
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及电子元器件加工技术领域,具体地说,是涉及一种电感器测试包装机。
背景技术
电感器、变压器、滤波器等都属于电子元器件,且均是电子元件和小型机器、仪器的重要组成部分。其中,电感器主要包括座体和绕组本体,座体系将绕组本体埋入金属磁性粉末内部压铸而成,座体上设置有两个表面贴装引脚,表面贴装引脚作为绕组本体的引出脚,两个表面贴装引脚分别与绕组本体的两端电连接,且两个表面贴装引脚分别位于座体的相对的两侧处。为了保证电感器具备一定的绝缘性能,在电感器生产过程中,需要对电感器进行耐压测试,在电感器进行耐压测试时,将测试仪器的第一检测端与电感器的第一个引脚电连接,将测试仪器的第二检测端与电感器的座体电连接,并将电感器的第二个引脚与座体进行电连接。
此外,为了提高电气元器件的生产效率及产品质量,现有的电气元器件的生产模式已从传统的人工作业模式逐渐向机械自动化作业模式过渡,例如,采用电感器测试包装机对电感器进行自动化的供料、下料、耐压测试、层间耐压测试、喷码、外形尺寸检测、包装等等。然而,现有的电感器测试包装机存在的缺点是:耐压测试工装多位单一测试通道并电感器测试包装机的转盘上料装置使用,且由于耐压测试所需的时间较长,一般在3.5秒左右,而其他工序所需时间较短,导致电感器测试包装机的生产效率难以进一步提高。
发明内容
为了解决上述问题,本发明的主要目的是提供一种生产效率高的电感器测试包装机。
为了实现本发明的主要目的,本发明提供一种电感器测试包装机,其中,包括供料装置、耐压测试装置和转盘上料装置,耐压测试装置包括耐压测试工装和第一移栽单元,耐压测试工装包括上座和底座,上座上设置有测试单元和第一插针单元,测试单元包括两个以上的测试位,测试位内设置有第一探针、第二探针、第三探针和第四探针,第一探针和第三探针沿第一方向分布,第二探针和第四探针沿第二方向分布,第三探针和第四探针之间连接有电阻,第一插针单元包括两组以上的第一针组,两组以上的第一针组与两个以上的测试位一一对应,第一针组包括第一插针和第二插针,第一插针与第一探针电连接,第二插针与第二探针电连接,底座上设置有第二插针单元,第二插针单元包括两组以上的第二针组,两组以上的第二针组与两组以上的第一针组一一对应,第二针组包括第三插针和第四插针,上座与底座之间具有第一装配位置,在第一装配位置,第三插针与第一插针电连接,第四插针与第二插针电连接,第一移栽单元包括第一驱动机构和抓取机构,第一驱动机构可驱动抓取机构在供料装置、耐压测试工装和转盘上料装置之间移动。
由上可见,供料装置用于向耐压测试装置有序的供给电感器,使得第一移栽单元能够将电感器移送至耐压测试工装处进行耐压测试;而通过对耐压测试工装的结构设计,使得耐压测试工装能够同时对两个以上的电感器进行耐压测试,有效的提高了测试效率,并更好的减少转盘上料装置的等待时间;转盘上料装置则用于将通过耐压测试的电感器移送至其他装置处进行相应的后续加工和/或检测。
一个优选的方案是,两个以上的测试位沿第一方向分布,两组以上的第一针组沿第一方向分布,两组以上的第二针组沿第一方向分布,第一插针和第二插针沿第三方向分布,第三插针和第四插针沿第三方向分布,第三方向与第一方向相垂直,上座与底座之间具有第二装配位置,在第二装配位置,第三插针与第二插针电连接,第四插针与第一插针电连接。
由上可见,上述结构设计使得当电感器的类型发生变化(如两个不同类型的电感器之间的引脚位置的圆心角相差90°)时,可通过改变上座与底座之间的装配关系来使耐压测试工装适用于不同类型的电感器,从而有效的扩大了耐压测试工装的兼容性。
另一个优选的方案是,供料装置包括供料单元、第二移栽单元和移送单元,供料单元包括基架、移送机构和分料机构,基架具有沿第四方向分布的下料工位和取料工位,下料工位处设置有储料仓,移送机构包括托盘和第一驱动组件,托盘位于储料仓的下方,第一驱动组件可驱动托盘在第四方向上在储料仓的出口处和取料工位之间移动,分料机构包括分料末端和第二驱动组件,分料末端位于出口和托盘之间,第二驱动组件安装在基架上,第二驱动组件可驱动分料末端朝向或背向储料仓移动,使得在托盘的承载面上,分料末端的投影的至少一部分位于出口的投影内或分料末端的投影位于出口的投影外,第二移栽单元包括取放机构和第二驱动机构,移送单元包括第三驱动机构和载具,第三驱动机构可驱动载具移动至第一移栽单元处,第二驱动机构可驱动取放机构移动至移送单元处。
由上可见,供料单元的储料仓用于堆叠存放摆放有电感器的料盘,分料机构则通过分料末端的动作将储料仓的料盘逐个下方至移送机构的托盘上,继而第一驱动组件将承接了料盘后的托盘移送至取料工位处。第二移栽单元则通过第二驱动机构驱动取放机构在取料工位和第一移栽单元的后级单元,进而将料盘上的电感器有序的移送至耐压检测装置处。通过对供料装置的结构设计,使得供料装置在向耐压检测装置移送电感器时,能有效避免电感器收到磨损,对电气元器件起到保护作用的同时,降低产品的不合格率。
进一步的方案是,供料单元还包括两个托举机构,两个托举机构均设置在下料工位处,且两个托举机构分别位于移送机构的相对的两侧,托举机构包括第三驱动组件和托块,第三驱动组件安装在基架上,第三驱动组件可驱动托块在储料仓的落料方向上在分料末端和托盘之间移动。
由上可见,通过设置托举机构,使得分料机构在将储料仓内的料盘逐个下放至托盘上时,料盘能够平稳、准确地下落至托盘上,继而保证移栽单元的取放机构能够准确地吸取料盘上的电感器,并避免在料盘下落过程中,料盘上的电感器受到冲击而散乱分布在料盘上或跌出料盘外。
更进一步的方案是,基架还具有位于取料工位下游端的回收工位,回收工位处设置有回收料仓,第一驱动组件还可驱动托盘在第一方向上移动至回收料仓的入口处,供料单元还包括卡料机构和两个顶推机构,卡料机构包括卡料末端和第四驱动组件,卡料末端位于入口和托盘之间,第四驱动组件安装在基架上,第四驱动组件可驱动卡料末端朝向回收料仓移动,使得在承载面上,卡料末端的投影的至少一部分位于入口的投影内,两个顶推机构均设置在回收工位处,且两个顶推机构分别位于移送机构的相对的两侧,顶推机构包括第五驱动组件和推块,第五驱动组件安装在基架上,第五驱动组件可驱动推块在回收料仓的进料方向上在卡料末端和托盘之间移动。
由上可见,上述结构设计使得当料盘上的电感器被第二移栽单元取完后,第一驱动组件能够驱动托盘将空料盘移送至回收工位处,继而使顶推机构配合卡料机构将空料盘堆码到回收料仓内,以对空料盘进行回收。
更进一步的方案是,卡料末端为第一卡爪,第四驱动组件包括第一座体和第一弹性件,第一卡爪绕第一转动轴线与第一座体可转动地连接,第一弹性件迫使第一卡爪的爪部朝向回收料仓移动;和/或分料末端为第二卡爪,第二驱动组件包括第二座体、第二弹性件和第一气缸,第二卡爪绕第二转动轴线与第二座体可转动地连接,第二弹性件迫使第二卡爪的爪部朝向储料仓移动,第一气缸驱动第二卡爪的爪部背向储料仓移动。
由上可见,上述结构设计使得开料机构在配合顶推机构将空料盘堆码到回收料仓内的过程中,无需借助电气控制元件对卡料机构进行控制,使得供料装置的编程更加简单,并且,还能够保证空料盘被推入回收料仓时的流畅性以及防止空料盘进入回收料仓后从回收料仓的入口脱出回收料仓;此外,当分料机构将储料仓内的料盘逐个下放至托盘上时,先通过第一气缸驱动第二卡爪的爪部背向储料仓移动,使第二卡爪解除对最靠近出来仓出口处的第一个料盘的阻挡,进而使第一个料盘下落到托盘上,而后第一气缸进行复位,第二卡爪的爪部在第二弹性件的弹性势能作用下向储料仓移动,进而对第一个料盘上方的第二个料盘进行阻挡,以实现将料盘逐个下放到托盘上。
更进一步的方案是,转盘上料装置包括转盘、驱动单元和第一直振单元,转盘上设置有沿自身周向分布的吸料模组,吸料模组包括基座、吸料单元、限位挡块、第三弹性件和调节手轮,吸料单元包括气柱和吸嘴,气柱沿自身的轴向贯穿基座,吸嘴安装在气柱的第一端并与气柱连通,限位挡块安装在气柱的第二端处,基座位于吸嘴和限位挡块之间,第三弹性件迫使吸嘴在轴向背向基座移动,调节手轮绕自身的回转轴线可转动地安装在基座上,回转轴线垂直于轴向,调节手轮具有调节部,调节部的周壁上成型有至少一个配合面,限位挡块可与一个配合面或基座邻接,调节部可通过是配合面调节限位挡块与回转轴线在轴向上的垂直距离,驱动单元驱动转盘转动,每个吸料模组均可移动至第一直振单元处,第一驱动机构可驱动抓取机构移动至第一直振单元处。
由上可见,可预先根据吸料模组所需适配的不同高度的电感器的数量及电感器的高度值对调节手轮的调节部进行相匹配的设置,使得调节部上的每个配合面能够对应一种不同高度的电感器,以在当吸料模组所需西区的电感器的高度值发生变化时,可以通过转动调节手轮,使调节手轮上相对应的一个配合面与限位挡块进行接触,或使限位挡块直接与基座接触来对限位挡块与回转轴线在轴向上的垂直距离进行调节,而限位挡块则通过气柱调节吸嘴在轴向上的相对位置,从而使吸嘴能够适应于电感器的高度,保证吸料模组能够可靠的吸取电感器并避免电感器受损。通过对吸料模组的结构设计,使得当电感器的高度发生变化时,能够通过调节调节手轮来调节吸嘴的位置,进而既无需逐个对吸料模组的吸嘴进行更换,又能够更好的提高生产效率以及提高吸料模组的兼容性。
更进一步的方案是,配合面为平面;和/或配合面的数量为两个至六个,每个配合面与回转轴线之间均具有最大垂直距离,两个至六个最大垂直距离均不相等,或两个至六个最大垂直距离中有至少两个不相等。
由上可见,将配合面设置成平面能够保证配合面与限位挡块接触时的稳定性和可靠性;而配合面的数量、配合面与回转轴线之间的最大垂直距离则可根据吸料模组所需适配的不同高度的电感器的数量及电感器的高度值进行相适应的设置,以使得吸料模组能够适用于不同高度的多个电感器。
更进一步的方案是,基座在靠近限位挡块的一端处设置有弧面凹槽,调节手轮还具有回转部和操作部,回转部位于调节部和操作部之间,调节部和回转部均位于弧面凹槽内,吸料模组还包括固定螺栓,固定螺栓穿过调节手轮并与基座螺纹,回转部可绕回转轴线在弧面凹槽内转动。
由上可见,基座上的弧面凹槽能够对调节手轮的回转部进行适当的支撑和限位,以使得调节手轮能够较为稳定、可靠的转动,而固定螺栓则用于将调节手轮固定在基座上。
更进一步的方案是,吸料模组还包括轴套和弹簧柱塞,调节手轮绕回转轴线可转动地套装在轴套上,固定螺栓贯穿轴套,操作部正对基座的一面上设置有两个以上的限位凹槽,两个以上的限位凹槽绕回转轴线分布,弹簧柱塞安装在基座上,在限位挡块与配合面或基座邻接时,弹簧柱塞的定位珠与两个以上的限位凹槽中的一个卡合。
由上可见,上述设计使得固定螺栓能够通过轴套将调节手轮固定在基座上,同时还实时调节手轮在转动过程中无需对调节螺栓进行操作;此外,每次完成对调节手轮的转动后,弹簧柱塞能够通过操作部上的限位凹槽对调节手轮进行限位,以避免调节手轮在非调节状态下发生转动。
附图说明
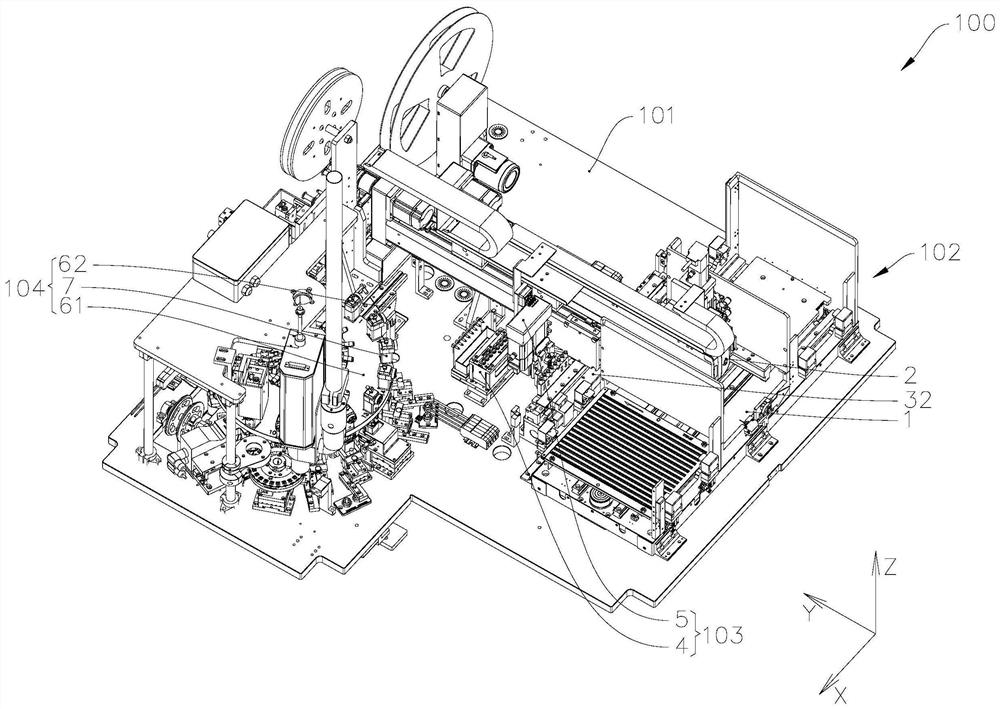
图1是本发明电感器测试包装机第一实施例的省略部分组件后的结构图。
图2是本发明电感器测试包装机第一实施例的供料单元的第一省略部分组件后的结构图。
图3是本发明电感器测试包装机第一实施例的供料单元的第二省略部分组件后的结构图。
图4是本发明电感器测试包装机第一实施例的供料单元的第三省略部分组件后的结构图。
图5是本发明电感器测试包装机第一实施例的分料机构的剖视图。
图6是本发明电感器测试包装机第一实施例的卡料机构的剖视图。
图7是本发明电感器测试包装机第一实施例的供料单元的第四省略部分组件后的结构图。
图8是本发明电感器测试包装机第一实施例的供料装置的省略部分组件后的结构图。
图9是本发明电感器测试包装机第一实施例的耐压测试装置的结构图。
图10是本发明电感器测试包装机第一实施例的耐压测试装置的省略部分组件后的结构图。
图11是本发明电感器测试包装机第一实施例的耐压测试工装的分解图。
图12是本发明电感器测试包装机第一实施例的上座的局部结构图。
图13是本发明电感器测试包装机第一实施例的底座的局部结构图。
图14是本发明电感器测试包装机第一实施例的上座的省略部分组件后的局部结构图。
图15是本发明电感器测试包装机第一实施例的上座的各探针与电感器的连接示意图。
图16是本发明电感器测试包装机第一实施例的吸嘴模组的结构图。
图17是本发明电感器测试包装机第一实施例的吸嘴模组的分解图。
图18是本发明电感器测试包装机第一实施例的调节手轮的第一视角下的结构图。
图19是本发明电感器测试包装机第一实施例的调节手轮的第二视角下的结构图。
图20是本发明电感器测试包装机第二实施例的吸料模组的第一使用状态参考图。
图21是本发明电感器测试包装机第二实施例的吸料模组的第二使用状态参考图。
以下结合附图及实施例对本发明作进一步说明。
具体实施方式
电感器测试包装机第一实施例
参照图1,电感器测试包装机100包括机架101、供料装置102、耐压测试装置103和转盘上料装置104,供料装置102、耐压测试装置103和转盘上料装置104均安装在机架101上。其中,耐压测试装置103用于对供料装置102供给的电感器进行耐压测试,并将通过耐压测试的电感器移送至转盘上料装置104处进行后续检测和包装。
供料装置102包括供料单元1、第二移栽单元2、第二直振单元31、移送单元32和料盘33。参照图2和3,供料单元1包括基架11、移送机构12、分料机构13、托举机构14、卡料机构15和顶推机构16。基架11具有下料工位111、取料工位112和回收工位113,下料工位111、取料工位112和回收工位113依次沿第四方向分布,第四方向与第一方向X相反。下料工位111处设置有储料仓1111,储料仓1111用于存放摆放有电感器的料盘33;回收工位113处设置有回收料仓1131,回收料仓1131用于对空料盘33进行回收。
移送机构12用于将料盘33从下料工位111的储料仓1111处移送至取料工位112处,使第二移栽单元2能够将料盘33上的电感器取走,此外,移送机构12还用于将料盘33从取料工位112处移送至回收工位113处,使得当料盘33上的电感器被全部取走后,空料盘33能够被自动回收至回收料仓1131内。具体地,移送机构12包括托盘121和第一驱动组件122。
在储料仓1111的落料方向上,托盘121位于储料仓1111下方,且托盘121位于回收料仓1131的下方;其中,落料方向与耐压测试装置103的高度方向Z相反。托盘121用于承接储料仓1111内落下的料盘33,第一驱动组件122用于驱动托盘121在第四方向上移动,以使得托盘121能够在下料工位111、取料工位112和回收工位113之间移动,即第一驱动组件122能够驱动托盘121在储料仓1111的出口、取料工位112和回收料仓1131的入口之间移动。具体地,在本实施例中,第一驱动组件122包括两个带轮1221、传动带1222、第一电机1223和第一导轨模组1224。其中,两个带轮1221沿第四方向分布,带轮1221绕自身的轴线可转动地安装在基架11上,且带轮1221的轴向平行于落料方向;传动带1222绕设在两个带轮1221之间,托盘121与传动带1222固定连接;第一电机1223用于驱动两个带轮1221中的一个转动,进而通过传动带1222和两个带轮1221的配合驱动托盘121在第四方向上移动;第一导轨模组1224沿第四方向延伸,且第一导轨模组1224连接在托盘121和基架11之间,第一导轨模组1224的设置使得托盘121的移动更加的平稳、可靠。需要说明的是,在其他实施例中,第一驱动组件122可以被设置为其他结构,如包括滚珠丝杠、第二电机和第二导轨模组。可见,第一驱动组件122的结构可根据其安装空间、托盘121的控制要求及供料装置102的生产成本等条件进行相适应的调整、改变。
分料机构13设置在储料仓1111的出口处,分料机构13用于控制储料仓1111内的料盘33逐个下放到托盘121上。结合图4和图5,分料机构13包括分料末端131和第二驱动组件132,在落料方向上,分料末端131位于储料仓1111的出口和托盘121之间,第二驱动组件132安装在基架11上,第二驱动组件132用于驱动分料末端131朝向或背向储料仓1111的出口移动,以使得在托盘121的承载面上,分料末端131的投影的至少一部分能够位于储料仓1111的出口的投影内或分料末端131的投影位于储料仓1111的出口的投影外,进而实现分料机构13将料盘33阻挡在储料仓1111内或实现分料机构13将料盘33下方至料盘33上。
具体地,在本实施例中,分料末端131为第二卡爪,第二驱动组件132包括第二座体1321、第二弹性件1322和第一气缸1323。其中,第二座体1321固定安装在基架11上,第二卡爪绕第二转动轴线与第二座体1321可转动地连接,第二转动轴线平行于第四方向;第二弹性件1322优选采用第二压缩弹簧,第二压缩弹簧抵接在第二座体1321和第二卡爪之间,且在落料方向上,第二压缩弹簧位于第二转动轴线的上方,第二压缩弹簧用于迫使第二卡爪绕第二转动轴线转动,以使第二卡爪的爪部朝向储料仓1111的出口移动;第一气缸1323安装在第二座体1321上,第一气缸1323的活塞杆平行于落料方向,且在落料方向上,第一气缸1323的活塞杆位于第二转动轴线的下方,第一气缸1323用于驱动的第二卡爪绕第二转动轴线转动,以使得第二卡爪的爪部背向储料仓1111的出口移动。优选地,第二卡爪上成型有楔形部1311,第一气缸1323的活塞杆上设置顶头1324,顶头1324具有弧面,弧面的中心线平行于第四方向,且弧面与楔形部1311的斜面1511邻接,而通过在第二卡爪上成型出楔形部1311以及在第一气缸1323的活塞杆上设置顶头1324,使得第二驱动组件132能够稳定、可靠地驱动第二卡爪的爪背向储料仓1111的出口移动,同时还能够对第一气缸1323的活塞杆和第二卡爪起到保护作用。
结合图7,托举机构14的数量优选为两个,两个托举机构14均设置在下料工位111处,且在落料方向上,托举机构14位于储料仓1111的出口的下方。此外,两个托举机构14还分别位于移送机构12的相对的两侧,托举机构14的设置使得分料机构13在将储料仓1111内的料盘33逐个下放至托盘121上时,料盘33能够平稳、准确地下落至托盘121上,继而保证第二移栽单元2能够准确吸取料盘33上的电感器,并避免在料盘33下落过程中,料盘33上的电感器由于受到冲击而散乱分布在料盘33上或跌出料盘33外。托举机构14包括第三驱动组件1331和托块142,第三驱动组件1331安装在基架11上,且第三驱动组件1331优选采用第三气缸,托块142与第三气缸的活塞杆固定连接,使得第三气缸能够驱动托块142在落料方向上在分料机构13的分料末端131和托盘121之间移动,以在当储料仓1111内的料盘33下落至托盘121的过程中,第三气缸能够先驱动托块142移动至分料机构13的分料末端131处,当分料机构13控制储料仓1111内的一个料盘33下落至托块142上后,第三气缸驱动托块142向托盘121移动,使得托块142上的料盘33平稳落至托盘121上。
结合图6,卡料机构15设置在回收料仓1131的入口处,卡料机构15用于配合顶推机构16将空料盘33堆码到回收料仓1131。卡料机构15包括卡料末端151和第四驱动组件152,在回收料仓1131的进料方向上,卡料末端151位于回收料仓1131的入口和托盘121之间,其中,进料方向与高度方向Z相同。第四驱动组件152用于驱动卡料末端151朝向回收料仓1131的入口移动,以使得在托盘121的承载面上,卡料末端151的投影的至少一分部能够位于回收料仓1131的入口的投影内,进而实现卡料末端151将料盘33阻挡在回收料仓1131内。具体地,在本实施例中,卡料末端151为第一卡爪,第四驱动组件152包括第一座体1521和第一弹性件1522。其中,第一座体1521固定安装在基架11上,第一卡爪绕第一转动轴线与第一座体1521可转动地连接,第一转动轴线平行于第四方向;第一弹性件1522优选采用第一压缩弹簧,第一压缩弹簧抵接在第一座体1521和第一卡爪之间,且在进料方向上,第一压缩弹簧位于第一转动轴线的上方,第一压缩弹簧用于迫使第一卡爪绕第一转动轴线转动,以使第一卡爪的爪部朝向回收料仓1131的入口移动,此外,第一卡爪的爪部的朝向料盘33的一面优选呈斜面1511设置,即该斜面1511倾斜于料盘33的承载面,使得料盘33在向第一卡爪移动过程中,料盘33能够通过该斜面1511推动第一卡爪绕第一转动轴线转动,以使第一卡爪的爪部背向回收料仓1131的出口移动,进而使得料盘33能够从第一卡爪的爪部的下方移动至第一卡爪的爪部的上方。可见,通过对卡料机构15的结构设计,使得空料盘33在堆码过程中,无需借助电气元件对卡料机构15进行控制,进而使得供料装置102的变成更加的简单,此外,卡料机构15的结构设计还能够保证空料盘33被推入回收料仓1131时的流畅性以及防止空料盘33进入回收料仓1131后从回收料仓1131的入口脱出回收料仓1131。
顶推机构16的数量优选为两个,两个顶推机构16均设置在回收工位113处,且在进料方向上,定位机构位于回收料仓1131的入口的下方。此外,两个顶推机构16还分别位于移送机构12的相对的两侧,顶推机构16的设置使得当移送机构12将空料盘33移送至回收工位113处时,顶推机构16能够将空料盘33推向卡料末端151,进而配合卡料机构15将空料盘33堆码到回收料仓1131内,以对空料盘33进行回收。顶推机构16包括第五驱动组件161和推块162,第五驱动组件161安装在基架11上,且第五驱动组件161优选采用第五气缸,推块162与第五气缸的活塞杆固定连接,使得第五气缸能够驱动推块162在进料方向上在卡料末端151和托盘121之间移动,以在当移送机构12的托盘121移动至回收工位113处时,第五气缸能够驱动推块162自托盘121的下方朝向卡料末端151移动,进而将托盘121上的空料盘33顶推向卡料末端151,使空料盘33从第一卡爪的爪部的下方移动至第一卡爪的爪部的上方,以实现将空料盘33堆码到回收料仓1131内。
结合图8,第二移栽单元2包括取放机构21和第四驱动机构22,第四驱动机构22可驱动取放机构21移动至取料工位112处,以使取放机构21吸取取料工位112处的料盘33上的电气元器件,此外,第四驱动机构22还可以驱动取放机构21移动至第二直振单元31处。具体地,第四驱动机构22包括第六驱动组件211和第七驱动组件222,其中,第六驱动组件211包括第一直线模组和第三电机,第七驱动组件222安装在第一直线模组的第一滑台上,使得第三电机能够通过第一直线模组驱动第七驱动组件222在第二方向上移动,其中,第三方向Y、第四方向与落料方向两两相互垂直,第七驱动组件222包括第二直线模组和第四电机。
取放机构21包括第二气缸211、吸料座212和安装架213,第二气缸211的活塞杆平行于落料方向,且第二气缸211与第二直线模组的第二滑台固定连接,使得第四电机能够通过第二直线模组驱动取放机构21在落料方向上移动。吸料座212固定安装在第二直线模组的滑台上,以使得吸料座212能够与第二气缸211筒部在落料方向上移动,其中,吸料座212内设置有滑槽2121,滑槽2121的纵深方向平行于落料方向。安装架213设置在滑槽2121内,并可沿滑槽2121的纵深方向移动,安装架213与第二气缸211的活塞杆固定连接,使得第二气缸211能够驱动安装架213在滑槽2121内移动,此外,安装架213朝向取料托盘121的一侧上设置有磁性件。吸料座212用于与电感器接触,并对电感器起到一定的保护作用,以避免电感器在被吸取过程中受到磨损。当取放机构21需要对电感器进行吸取时,第二气缸211控制安装架213朝向电气元器件移动,即第二气缸211控制安装架213朝向吸料座212的底部移动,进而使安装架213上的磁性件吸住电感器;而取放机构21要解除对电感器的吸取时,第二气缸211驱动安装架213背向电感器移动,即第二气缸211控制安装架213背向吸料座212的底部移动,以使磁性件的磁力不足以将电感器吸附、固定在吸料座212上,从而使得电感器从吸料座212上脱落。
移送单元32包括第三驱动机构321和载具322,第三驱动机构321可驱动载具322在第一方向X上在第二直振单元31和耐压测试装置103之间移动,当载具322位于第二直振单元31处时,第二直振单元31能够在第三驱动机构321的配合下将电感器逐个送入载具322的容纳槽内。此外,在本实施例中,料盘33的数量为多个,料盘33上设置有多个储料槽331,储料槽331用于容纳电感器并对电感器进行限位,以使得电感器能够整齐、有序的摆放在料盘33上。通过对供料装置的结构设计,使得供料装置在向耐压测试装置进行自动化供料的过程中,能有效避免电感器受到磨损,以降低产品的不合格品率。
参照图9,耐压测试装置103包括耐压测试工装4和第一移栽单元5。其中,耐压测试工装4可同时对多个电感器进行耐压测试,以提高测试效率;第一移栽单元5则用于将电感器从载具322至耐压测试工装4上进行耐压测试,以及将完成并通过耐压测试的电感器移送至耐压测试装置103的转盘上料装置104进行后续的加工。结合图10和图11,耐压测试工装4包括上座41、底座42、回收料盒43、接近开关传感器44和对射型光电传感器45,其中,上座41和底座42之间具有第一装配位置和第二装配位置。
结合图12,上座41上设置有测试单元411和第一插针单元412,且在本实施例中,上座41位于底座42的上方,测试单元411设置于上座41的顶部,第一插针单元412设置于上座41的底部。测试单元411包括两个以上的测试位4111,两个以上的测试位4111优选沿第一方向X分布,测试位4111内设置有第一探针4112、第二探针4113、第三探针4114和第四探针4115,其中,第一探针4112和第三探针4114沿第一方向X分布,第二探针4113和第四探针4115沿第二方向分布,且优选第一方向X垂直于第二方向。此外,第三探针4114和第四探针4115之间电连接有电阻4116。第一插针单元412包括两组以上的第一针组4120,两组以上的第一针组4120优选沿第一方向X分布,使得两组以上的第一针组4120与两个以上的测试位4111一一对应。每组第一针组4120均包括第一插针4121和第二插针4122,且第二插针4122和第一插针4121优选沿第三方向Y分布,第三方向Y垂直于第一方向X。第一插针4121与相对应的一个测试位4111内的第一探针4112电连接,第二插针4122与相对应的一个测试位4111内的第二探针4113电连接。
结合图13和图14,底座42上设置有第二插针单元421,且在本实施例中,第二插针单元421位于底座42的顶部。第二插针单元421包括两组以上的第二针组4210,两组以上的第二针组4210优选沿第一方向X分布,使得多组第二针组4210与多组第一针组4120一一对应。每组第二针组4210均包括第三插针4211和第四插针4212,且第四插针4212和第三插针4211沿第三方向Y分布。在第一装配位置,第三插针4211和第一插针4121相配合,以实现第三插针4211与第一插针4121之间的电连接,第四插针4212与第二插针4122相配合,以实现第四插针4212与第二插针4122之间的电连接。在第二装配位置,第三插针4211与第二插针4122相配合,以实现第三插针4211与第二插针4122之间的电连接,第四插针4212与第一插针4121相配合,以实现第四插针4212与第一插针4121之间的电连接。此外,在本实施例中,第一插针4121和第二插针4122均为母插针,第三插针4211和第四插针4212均为公插针。
需要说明的是,在其他实施例中,第一插针单元412还可以设置于上座41的侧部,例如,每组第一针组4120包括两根第一插针4121和两根第二插针4122,两根第一插针4121分别位于上座41的两个相对的侧壁上,两根第二插针4122分布位于前述的两个侧壁上,且在第一个侧壁上,第一插针4121位于第二插针4122的正上方;在第二侧壁上,第一插针4121位于第二插针4122的正下方;而第二插针单元421则可相应地设置在底座42的一个侧壁上。
回收料盒43设置在上座41的一侧,优选地,上座41与回收料盒43沿第三方向Y分布,回收料盒43用于对耐压测试不合格的电感器进行回收。接近开关传感器44的数量为两个以上,且两个以上的接近开关传感器44沿第一方向X分布,使得两个以上的接近开关传感器44与两组以上的第二针组4210一一对应。此外,接近开关传感器44位于回收料盒43的入口处,且回收料盒43位于接近开关传感器44和上座41之间。接近开关传感器44能够检测耐压测试不合格的电感器是否被投入到回收料盒43中,以避免耐压测试不合格的电感器参与后续的生产加工,进而更好的降低生产成本和产品的不合格品率。
测试单元411的测试位4111的数量优选为2个至10个,第一针组4120的数量与测试位4111的数量相等,第二针组4210的数量大于或等于测试位4111的数量,接近开关传感器44的数量等于第二针组4210的数量。具体地,在本实施例中,测试单元411的测试位4111的数量为8个,第一针组4120和第二针组4210的数量均为8组。对射型光电传感器45设置在上座41处,且在第一方向X上,对射型光电传感器45的发射端和接收端分别位于上座41的相对的两侧上。对射型光电传感器45用于检测测试单元411处是否有电感器。
如图9所示,第一移栽单元5包括抓取机构51和第一驱动机构52。抓取机构51用于抓取或放置电感器。抓取机构51包括连接座511、吸料座512、第四压缩弹簧513和第三导轨模组514。吸料座512上设置有吸料组件,吸料组件包括两个以上的吸嘴5121,两个以上的吸嘴5121沿第一方向X分布,使得两个以上的吸嘴5121与两个以上的测试位4111一一对应,且吸嘴5121的数量优选等于测试位4111的数量。采用吸嘴5121对电感器进行抓取既能够保证抓取的可靠性,又能够避免抓取机构51对电感器的耐压测试产生干扰。此外,吸料座512上设置有滑杆5122,滑杆5122沿第一探针4112的高度方向延伸,且滑杆5122沿第一探针4112的高度方向与连接座511可滑动地连接。其中,第一探针4112的高度方向平行于耐压测试工装4的高度方向Z。
第四压缩弹簧513套装在滑杆5122上,且第四压缩弹簧513的两端分别与连接座511、吸料座512抵接,第四压缩弹簧513用于迫使吸料座512在高度方向Z上朝向耐压测试工装4移动。第四压缩弹簧513的设置使得吸料座512能够具有一定的缓冲空间,以在当抓取机构51对电感器进行抓取或放置时能够避免抓取机构51、电感器或其他机构(如载具322、第一直振单元62等)之间出现硬性碰撞,从而避免抓取机构51、电感器及其他机构出现损伤或损坏。第三导轨模组514沿高度方向Z延伸,第三导轨模组514连接在连接座511和吸料座512之间,第三导轨模组514的设置使得吸料座512的移动更加的平稳、可靠。
第一驱动机构52包括第八驱动组件521和第九驱动组件522。第八驱动组件521包括第三直线模组5211和第三电机5212,第九驱动组件522安装在第三直线模组5211的第三滑台上,使得第三电机5212能够通过第三直线模组5211驱动第九驱动组件522在第三方向Y上移动。第九驱动组件522包括第四直线模组5221和第四电机5222,抓取机构51安装在第四直线模组5221的第四滑台上,使得第四电机5222能够驱动抓取机构51在高度方向Z上移动。
结合图15,当需要对电感器进行耐压测试时,第一移栽单元5的第一驱动机构52先驱动抓取机构51移动至载具322处抓取相应数量的电感器;接着,第一驱动机构52在驱动抓取机构51移动至耐压测试工装4的上座41处,使一个电感器位于一个测试位4111内,同时使电感器的壳体分别与测试位4111内的第一探针4112、第三探针4114接触,电感器的第一引脚与测试位4111内的第二探针4113接触,电感器的第二引脚与测试位4111内的第四探针4115接触,以实现耐压测试工装4对电感器进行耐压测试。
当耐压测试工装4完成对电感器的耐压测试后,第一移栽单元5的第一驱动机构52先驱动抓取机构51移动至耐压测试工装4的回收料盒43处;接着,当被抓取多个电感器中存在耐压测试不合格的电感器时,抓取机构51将耐压测试不合格的电感器丢入回收料盒43中,同时与该耐压测试不合格的电感器相对应的一个接近开关传感器44检测该耐压测试不合格的电感器是否被丢入回收料盒43进行回收;接着,第一驱动机构52驱动抓取机构51移动至转盘上料装置104的第一直振单元62处,以将耐压测试检测合格的电感器放置到第一直振单元62上。
当电感器的类型发生改变(如两个不同类型的电感器之间的引脚位置的圆心角相差90°)时,将上座41调转180°,使得上座41有第一装配位置切换至第二装配位置,此时,该电感器的壳体分别与测试位4111内的第二探针4113、第四探针4115接触,电感器的第一引脚与第一探针4112接触,电感器的第二引脚与第三探针4114接触。可见,通过对耐压测试工装4的结构设计,使得该耐压测试工装4能够同时对两个以上的电感器进行耐压测试,有效的提高了测试效率,且当被测电感器的类型发生改变时,可通过改变上座41与底座42之间的装配关系来使耐压测试工装4适用于不同类型的电感器,从而有效的扩大了耐压测试工装4的兼容性,同时耐压测试工装4还能够有效的减少转盘上料装置104的等待时间。
转盘上料装置104包括转盘61、第一直振单元62、吸料模组7和驱动单元。其中,转盘61绕自身的轴线可转动地安装在机架101上,且转盘61的轴线平行于高度方向Z。吸料模组7的数量为多个,多个吸料模组7沿转盘61的周向均匀分布,且多个吸料模组7均安装在转盘61上。机架101在转盘61的周向上设置有多个加工工位,其中,第一直振单元62设置在多个加工工位中的一个上,第一直振单元62用于将第一移栽单元5移送的通过耐压测试的电感器逐个移送向转盘61上的吸料模组7的正下方处,使得当吸料模组7经过第一直振单元62时,能够在第一直振单元62上抓取相应数量的电感器。此外,其他加工工位分别设置有其他装置,如层间耐压检测装置、视觉检测装置、包装装置等,使得当电感器被吸料模组7移送至不同的加工工位时,该加工工位内的装置能够对电感器进行相应的加工。驱动单元安装在机架101上,驱动单元用于驱动转盘61转动以及驱动转盘61在高度方向Z上相对机架101移动,以控制吸料模组7对电感器进行取放。
参照图16和图17,吸料模组7包括基座71、吸料单元72、限位挡块73、第三弹性件74、调节手轮75、固定螺栓76、轴套77和弹簧柱塞78。基座71安装在转盘61,以使吸料模组7随转盘进行移动。基座71的中部设置有通孔,通孔贯穿基座71。
吸料单元72包括气柱721和吸嘴722,气柱721沿通孔的轴向延伸并贯穿基座71的通孔,使得气柱721的两端分别位于通孔外。气柱721的中部设置有气体流道,吸嘴722安装在气柱721的第一端上,吸嘴722上设置有气孔,气孔与气体流道连通。优选地,吸嘴722与气柱721可拆卸地连接,使得当吸嘴722出现损坏时,可以仅对气嘴进行更换而无需更换整个吸料单元72。限位挡块73安装在气柱721的第二端处,使得基座71位于吸嘴722和限位挡块73之间,限位挡块73的设置既用于防止气柱721脱离基座71,又用于限制吸嘴722的下移极限位置,即限位挡块73具有限定吸嘴722与基座71在气柱721的轴向上的最大距离的作用。此外,基座71在靠近限位挡块73的一端处设置有弧面凹槽711,弧面凹槽711的轴向垂直于气柱721的轴向,弧面凹槽711用于对调节手轮75起到一定的支撑和限位作用。
第三弹性件74用于迫使吸嘴722在气柱721的轴向上背向基座71移动,具体地,在本实施例中,第三弹性件74采用第三压缩弹簧,第三压缩弹簧套装在气柱721上,且第三压缩弹簧两端分别与气柱721上的第一限位部7211、基座71抵接,当然,若气柱721上没有设置第一限位部7211时,第三压缩弹簧则抵接在吸嘴722和基座71之间。此外,在其他实施例中,第三弹性件74也可采用拉簧,而当第三弹性件74采用拉簧时,第三弹性件74的两端可分别与限位挡块73、基座71连接,或第三弹性件74的两端也可分别与气柱721的第二端、基座71连接。可见,第三弹性件74的结构及位置设置可根据设计要求、安装空间等条件进行相适应的调整、设置。
结合图18和图19,调节手轮75绕自身的回转轴线可转动地安装在基座71上,其中,调节手轮75的回转轴线垂直于轴向。调节手轮75具有调节部751、回转部752和操作部753,回转部752位于调节部751和操作部753之间,且调节部751、回转部752和操作部753优选为一体成型。此外,回转部752和操作部753优选呈圆柱状设置,且回转部752的轴线、操作部753的轴线和调节手轮75的回转轴线呈共线设置。调节部751和回转部752位于均位于基座71的弧面凹槽711内,调节部751的周壁上成型有至少一个配合面7511,且限位挡块73可与一个配合面7511或基座71邻接,从而使得调节手轮75可以通过调节部751的配合面7511调节限位挡块73与回转轴线在气柱721的轴向上的垂直距离。优选地,配合面7511为平面,因为将配合面7511设置成平面能够更好的保证配合面7511与限位挡块73接触时的稳定性和可靠性。此外,配合面7511的数量优选为两个至六个,每个配合面7511与调节手轮75的回转轴线之间均具有最大垂直距离H,其中,每个配合面7511与调节手轮75的回转轴线之间的最大垂直距离H均不相等,或者,两个至六个配合面7511中具有至少两个配合面7511与调节手轮75的回转轴线之间的最大垂直距离H不相等,即至少两个最大垂直距离H不相等。
例如,在本实施例中,调节部751具有四个配合面7511,限位挡块73始终与四个配合面7511中的任意一个进行配合接触,且四个配合面7511中有两个配合面7511与调节手轮75的回转轴线之间的最大垂直距离H相等,即在本实施例中,调节手轮75可对限位挡块73与回转轴线在气柱721的轴向上的垂直距离进行三种不同距离值的调节,使得吸料模组7能够适用于三种不同高度的目标物料。需要说明的是,在其他实施例中,若每个配合面7511与调节手轮75的回转轴线之间的最大垂直距离H均不相等,且限位挡块73始终与两个以上的配合面7511中的一个配合接触时,限位挡块73的可切换位置数量与调节部751上的配合面7511的数量相等,如当调节部751上具有五个配合面7511时,限位挡块73则具有五个可切换位置,即吸料模组7能够适用于五种不同高度的目标物料。
操作部753位于基座71的弧面凹槽711外,操作部753用于为工作人员提供旋转调节手轮75的施力点。固定螺栓76用于将调节手轮75固定在基座71上,其中,固定螺栓76的轴线平行于调节手轮75的回转轴线。轴套77设置在调节手轮75和固定螺栓76之间,使得固定螺栓76能够通过轴套77将调节手轮75固定在基座71上,同时还使得调节手轮75在转动过程中无需对固定螺栓76进行操作,即轴套77的设置使得在对调节手轮75进行转动时,无需对固定螺栓76进行拧紧或拧松。具体地,调节手轮75套装在轴套77上,轴套77在靠近固定螺栓76的螺帽的一端设置有第二限位部771,第二限位部771的设置能够有效的防止调节手轮75从轴套77上脱出,当固定螺栓76将轴套77和调节手轮75固定在基座71上时,固定螺栓76的螺柱贯穿轴套77后与基座71进行螺纹连接,使得轴套77的两端分别与基座71、固定螺栓76的螺帽邻接,进而避免轴套77沿固定螺栓76的轴向移动。
此外,操作部753正对基座71的一面上设置有两个以上的限位凹槽7531,两个以上的限位凹槽7531绕调节手轮75的回转轴线分布。弹簧柱塞78安装在基座71上,且在限位挡块73与调节部751的配合面7511进行接触配合时,弹簧柱塞78定位珠与两个以上的限位凹槽7531中的一个卡合。优选地,限位凹槽7531的数量与调节部751上配合面7511的数量相等,使得无论当限位挡块73与调节部751的哪个配合面7511进行接触配合时,弹簧柱塞78总能够与多个限位凹槽7531中的一个卡合。在本实施例中,限位凹槽7531的数量为四个,四个限位卡槽绕调节手轮75的回转轴线均匀分布。弹簧柱塞78的设置使得每次完成对调节手轮75的转动后,弹簧柱塞78能够通过操作部753上的限位凹槽7531对调节手轮75进行限位,以避免调节手轮75在非调节状态下发生转动。
吸料模组7设计时,可预先根据吸料模组7所需适配的不同高度的目标物料的数量及目标物料的高度值对调节手轮75的调节部751进行相匹配的设置,使得调节部751上的每个配合面7511能够对应一种不同高度的目标物料,以在当吸料模组7所需吸取的目标物料的高度值发生变化时,可以通过转动调节手轮75,使调节手轮75上相应的一个配合面7511与限位挡块73进行配合接触来对限位挡块73与回转轴线在气柱721的轴向上的垂直距离进行调节,而限位挡块73则通过气柱721调节吸嘴722在轴向上的相对位置,从而使吸嘴722能够适应于目标物料的高度,保证吸料模组7能够可靠的吸取目标取料并避免目标物料受损。通过对吸料模组7的结构设计,使得当电感器的高度方向变化时,能够通过调节手轮75来调节吸嘴722的位置,进而既无需逐个对吸料模组7的吸嘴722进行更换,又能够更好的提高生产效率以及提高吸料模组7的兼容性。需要说明的是,本发明提供的电感器测试包装机也可适用于对变压器进行加工。综上可见,通过对电感器测试包装机的结构设计,使得电感器测试包装机具有生产效率高、兼容性强的优点。
电感器测试包装机第二实施例
参照图20和图21,本实施例与吸料模组第一实施例的不同之处在于限位挡块82与基座81、调节手轮的配合方式,具体地,在本实施例中,调节手轮的调节部831具有一个配合面8311,限位挡块82可以与该配合面8311进行配合接触或与基座81进行配合接触,而虽然在本实施例中,调节手轮的调节部831仅具有一个配合面8311,但由于当限位挡块82与基座81进行配合接触时,在气柱841的轴向上,限位挡块82与调节手轮的回转轴线之间的垂直距离为H1,而当限位挡块82与调节部831的配合面8311进行配合接触时,在气柱841的轴向上,限位挡块82与调节手轮的回转轴线之间的垂直距离等于配合面8311与调节手轮的回转轴线之间的最大垂直距离H2,且H2大于H1。可见,虽然调节手轮的调节部831仅具有一个配合面8311,但通过对调节手轮的结构设计,使得通过转动调节手轮仍能够使得限位挡块82具有两个可切换位置,从而使得吸料模组可对两种不同高度的目标物料进行吸取。
最后需要强调的是,以上所述仅为本发明的优选实施例,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种变化和更改,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 耐压测试工装、测试装置及电感器测试包装机
- 一种电感器全自动测试包装机及其使用方法