一种基于多传感器信息融合的协同感知方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明属于人工智能技术领域,具体涉及一种基于多传感器信息融合的协同感知方法。
背景技术
人工智能亦称智械、机器智能,指由人制造出来的机器所表现出来的智能。通常人工智能是指通过普通计算机程序来呈现人类智能的技术。该词也指出研究这样的智能系统是否能够实现,以及如何实现。人工智能于一般教材中的定义领域是“智能主体的研究与设计”,智能主体指一个可以观察周遭环境并作出行动以达致目标的系统。约翰·麦卡锡于1955年的定义是“制造智能机器的科学与工程”。安德里亚斯·卡普兰和迈克尔·海恩莱因将人工智能定义为“系统正确解释外部数据,从这些数据中学习,并利用这些知识通过灵活适应实现特定目标和任务的能力”。人工智能的研究是高度技术性和专业的,各分支领域都是深入且各不相通的,因而涉及范围极广。聚焦人工智能重大科学前沿问题,以突破人工智能基础机理、模型和算法瓶颈为重点,重点布局可能引发人工智能范式变革的新一代人工智能基础理论研究,为人工智能持续发展与深度应用,提供强大科学储备项目面向重大科学前沿和原始创新,申请者应针对研究目标明确应用需求背景,凝练核心科学问题,提出能够形成本方向具有国际影响力的可验证系统(包括验证数据库、验证环境和验证结果等),鼓励代码开源和数据共享,但是现有传感器信息融合的协同感知存在以下问题:
一、现有传感器信息融合的协同感知,面向开放环境应用场景变换易导致智能系统性能急剧下降;
二、此外现有传感器信息融合的协同感知,不方便面向离散制造业和流程工业中复杂多维度人机物协同;
三、最后现有传感器信息融合的协同感知,不方便在针对无人系统自主智能精准感知与操控。
发明内容
本发明要解决的技术问题是克服现有的缺陷,提供一种基于多传感器信息融合的协同感知方法,以解决上述背景技术中提出的面向开放环境应用场景变换易导致智能系统性能急剧下降的问题。
为实现上述目的,本发明提供如下技术方案:一种基于多传感器信息融合的协同感知方法,包括以下步骤:
步骤一、模拟信号,并建立信号模型,同时将信号传输至各个节点;
步骤二、各个传感器节点分类识别该信号,并将信号进行分类,将分类后的信号传输至不同的处理器中;
步骤三、计算机节点可信度,提供复杂制造环境下的协同控制与决策;
步骤四、计算节点可靠性,跨媒体内容管理、跨模态医疗分析等重大需求,实现可回溯、可解释的类人跨媒体智能推理系统;
步骤五、对计算出的函数进行加密处理,认知任务下的场景主动感知技术;
步骤六、建立智能基础支撑体系角度;
步骤七、进行下一次协同决策。
优选的,所述步骤一,包括协同管理单元、故障诊断单元、信息判断单元、信息推理单元、信息融合单元、感知学习单元和多源异构信息协同决策单元,信号输入端用于连接多源异构传感器节点模型,信号输出端连接多源异构信息协同决策单元,协同管理单元用于对各个单元间的合作进行管理,通过对传感器设备的信息采集与分析的任务进行分解,向各功能单元分配任务,并根据任务执行情况对各单元提出的协同请求进行回应;故障诊断单元用于实现故障的诊断任务;信息判断单元用于实现诊断所需信息的判断,接受信息融合部中其它单元提出的判断请求,进行信息的判断,并将判断结果反馈给提出的判断请求的单元;信息推理单元用于实现不确定信息的推理,根据概率模型,应用贝叶斯网络推理公式计算各有向弧对应事件发生的后验概率,并提供给多源异构信息协同决策单元作为推理诊断的依据,针对应用场景变换易导致智能系统性能急剧下降问题,发展适应能力强的层次化网络结构、可连续学习的机器学习策略及一般性效能度量方法,突破无监督学习、经验记忆利用、内隐知识发现与引导及注意力。
优选的,所述步骤二,各个传感器节点分类识别该信号,并将信号进行分类,将分类后的信号传输至不同的处理器中,研究基于跨媒体的人类常识知识形成的机器学习新方法,并在常识知识支持下对跨媒体数据进行自底向上的深度抽象和归纳,有效管控不确定性的自顶向下演绎和推理,建立符号逻辑推理、归纳学习和直觉顿悟相互协调补充的新模型和方法,针对人类经济活动、人机对抗等非完全信息条件下的博弈特点,结合机器学习、控制论、博弈论等领域进展,研究不确定复杂环境下的动力学机制,将对抗学习、强化学习与动态博弈论进行融合。
优选的,所述步骤三,面向离散制造业和流程工业中复杂多维度人机物协同问题,研究跨层、跨域的分布式网络化协同控制方法,突破人机物三元协同决策与优化理论,实现人机物的虚实融合与动态调度,探索无人加工生产线的重构及人机共融智能交互等。
优选的,所述步骤四,利用贝叶斯公式将节点的可靠性分解为节点的互信度与可信度,从节点的监测结果相互支持、节点监测结果的不确定性、节点的历史分类正确率、节点接收目标信号的信噪比和环境影响等方面分别对节点的互信度和可信度进行了推导和建模,该模型涵盖了影响节点可靠性的各种因素,并对各种因素进行了合理分析和量化,实现了高可靠性的智能辅助决策。
优选的,所述步骤五,包括函数加密生成装置,通过函数加密生成装置对函数进行加密,输入的随机种子和原始密钥,根据原始密钥生成R轮迭代计算所需的轮密钥,其中R轮迭代计算所需的轮密钥包括第r轮的轮密钥,R表示生成加密函数所需的迭代计算的轮数,R是正整数并且1≤r≤R;通过使用随机数产生器并且根据随机种子生成R轮迭代计算所需的仿射扩张掩码和R轮迭代计算所需的随机干扰数据,其中仿射扩张掩码用于将m比特数据仿射地变换成n比特数据,m和n是预设正整数,n>m,R轮迭代计算所需的仿射扩张掩码包括第r轮的仿射扩张掩码,并且R轮迭代计算所需的随机干扰数据包括第r轮的随机干扰数据以此完成对函数的加密。
优选的,所述步骤六,建立智能基础支撑体系角度使新型感知器件与芯片可以模拟生物视、听、触、嗅等感知通道的信号处理和信息加工机理,研制新型感知器件、芯片以及相应的神经网络感知信息表示、处理、分析和识别算法模型,开发功能类似生物、性能超越生物的感知系统并实现功能验证,神经网络处理器关键标准与验证芯片设计支持训练和推理的神经网络计算指令集,制定神经网络表示与压缩标准,在此基础上开发高效基础算法库和接口标准,实现配套开发工具链,建立开放的、不依赖于具体芯片实现方式的芯片平台标准,实现软硬件系统接口的统一化,实现支持上述指令集、算法库、标准及开发接口的验证芯片和示例应用。
优选的,所述步骤七,计算结束,回到步骤一开始下一次计算。
优选的,所述利用贝叶斯公式ε=∑^n*εili(Iai+Ibi+Ici)/∑^n*li(Iai+Ibi+Ici)×100%,采用对称分量法,按照每一段线路各相流经的电量,计算出各自的三相不平衡度,然后以每一档线路的长度为加权,计算出整条线路的三相负荷统计不平衡度,式中:下标i=1.2...n,下标a、b和c分别表示变压器的三相,ε为线路的三相负荷统计不平衡度;εi为线路每一档线路的三相负荷不平衡度;li为线路每一档线路的长度;Iai,Ibi,Ici分别为线路每一档线路的各相电流大小。
优选的,所述博弈,研究开放、动态、复杂环境下的大规模群体协作的组织架构、行为模式和激励机制,建立可表达、可计算、可调控的复合式激励算法,探索个体贡献汇聚成群体智能的涌现机理和演化规律,突破面向全局目标的群体智能演进方法和时空敏感的群体智能协同决策,研究不确定性、脆弱性和开放性条件下的任务建模、环境建模和人类行为建模,发展人在回路的机器学习方法及混合增强智能评价方法,把人对复杂问题分析与响应的高级认知机制与机器智能系统紧密耦合,有效避免由于人工智能技术的局限性引发的决策风险和系统失控。
与现有技术相比,本发明提供了一种基于多传感器信息融合的协同感知方法,具备以下有益效果:
1、本发明通过设置面向开放环境的自适应感知,针对应用场景变换易导致智能系统性能急剧下降问题,发展适应能力强的层次化网络结构、可连续学习的机器学习策略及一般性效能度量方法,突破无监督学习、经验记忆利用、内隐知识发现与引导及注意力选择等难点,研究基于跨媒体的人类常识知识形成的机器学习新方法,并在常识知识支持下对跨媒体数据进行自底向上的深度抽象和归纳,有效管控不确定性的自顶向下演绎和推理,建立符号逻辑推理、归纳学习和直觉顿悟相互协调补充的新模型和方法,支持跨媒体知识的不一致性分析,针对人类经济活动、人机对抗等非完全信息条件下的博弈特点,结合机器学习、控制论、博弈论等领域进展,研究不确定复杂环境下的动力学机制,将对抗学习、强化学习与动态博弈论进行融合,博弈;
2、本发明通过设置人在回路的混合增强智能,研究不确定性、脆弱性和开放性条件下的任务建模、环境建模和人类行为建模,发展人在回路的机器学习方法及混合增强智能评价方法,把人对复杂问题分析与响应的高级认知机制与机器智能系统紧密耦合,有效避免由于人工智能技术的局限性引发的决策风险和系统失控;
3、本发明通过设置认知任务下的场景主动感知技术,针对复杂环境中的自主定位、目标搜寻、场景分析和解释等认知要求,研究自然场景的主动视觉感知、三维环境动态建模和定位技术;研究复杂场景中声学环境探测与基于听觉反馈机理的言语主动感知技术;研究视听觉协同的从自然场景主动发现新目标及其属性知识的认知技术;
4、本发明通过设置人机协同软硬件技术研究,研究构造软硬件一体化的人机协同技术平台,研究适应真实世界情境理解与协同决策的模型与方法;研究人机协同中混合人类直觉、经验、行为的新型学习方法;研究环境和情景的自然理解、大规模知识的处理技术等;
5、本发明通过设置无人系统自主智能精准感知与操控,针对海、陆、空、天无人平台等自主智能发展需求,研究无约束环境、资源受限条件下的基于多传感器信息融合的协同感知方法;研究复杂场景下多源异构感知对象快速精准的分割、检测、定位、跟踪和识别方法;研究大范围场景地图构建、自主定位、透彻感知与动态认知等语义建模和理解方法等;研究复杂环境下面向多任务的协同、柔顺、精准操控方法。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制,在附图中:
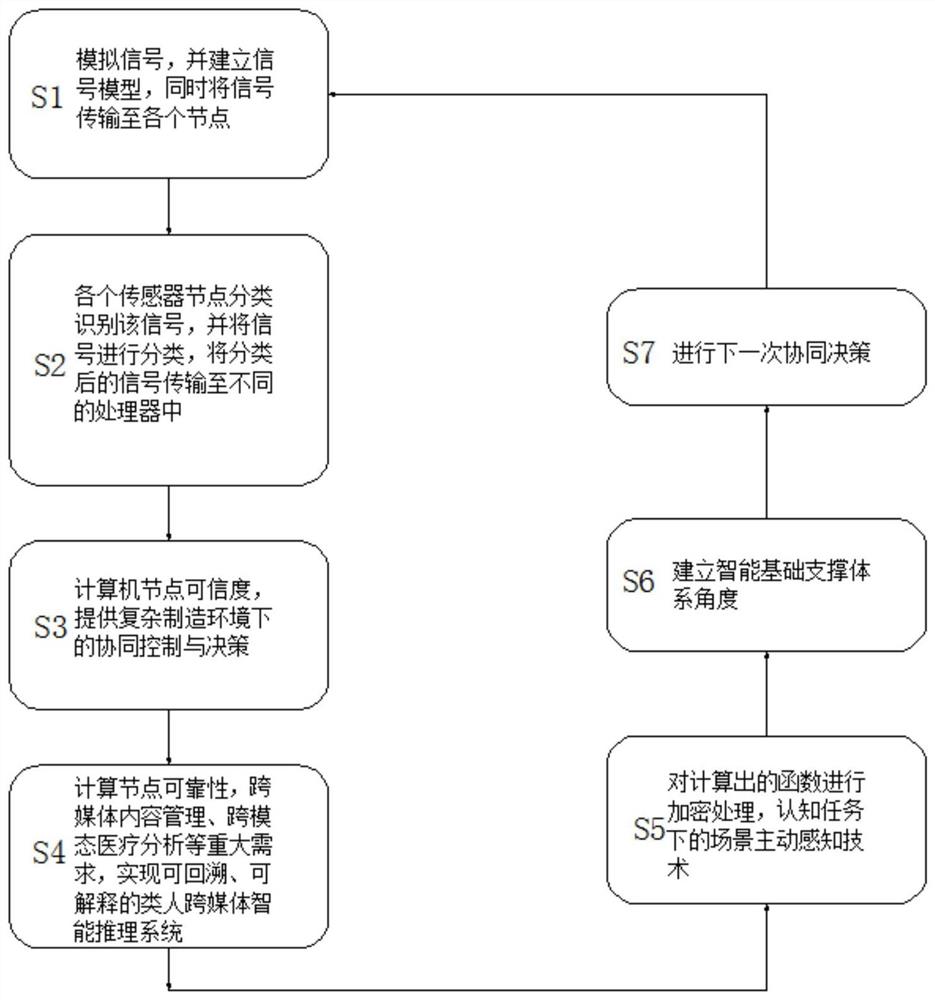
图1为本发明提出的流程图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,本发明提供一种技术方案:一种基于多传感器信息融合的协同感知方法,包括以下步骤:
步骤一、模拟信号,并建立信号模型,同时将信号传输至各个节点;
步骤二、各个传感器节点分类识别该信号,并将信号进行分类,将分类后的信号传输至不同的处理器中;
步骤三、计算机节点可信度,提供复杂制造环境下的协同控制与决策;
步骤四、计算节点可靠性,跨媒体内容管理、跨模态医疗分析等重大需求,实现可回溯、可解释的类人跨媒体智能推理系统;
步骤五、对计算出的函数进行加密处理,认知任务下的场景主动感知技术;
步骤六、建立智能基础支撑体系角度;
步骤七、进行下一次协同决策。
本发明中,优选的,所述步骤一,包括协同管理单元、故障诊断单元、信息判断单元、信息推理单元、信息融合单元、感知学习单元和多源异构信息协同决策单元,信号输入端用于连接多源异构传感器节点模型,信号输出端连接多源异构信息协同决策单元,协同管理单元用于对各个单元间的合作进行管理,通过对传感器设备的信息采集与分析的任务进行分解,向各功能单元分配任务,并根据任务执行情况对各单元提出的协同请求进行回应;故障诊断单元用于实现故障的诊断任务;信息判断单元用于实现诊断所需信息的判断,接受信息融合部中其它单元提出的判断请求,进行信息的判断,并将判断结果反馈给提出的判断请求的单元;信息推理单元用于实现不确定信息的推理,根据概率模型,应用贝叶斯网络推理公式计算各有向弧对应事件发生的后验概率,并提供给多源异构信息协同决策单元作为推理诊断的依据,针对应用场景变换易导致智能系统性能急剧下降问题,发展适应能力强的层次化网络结构、可连续学习的机器学习策略及一般性效能度量方法,突破无监督学习、经验记忆利用、内隐知识发现与引导及注意力,本发明通过设置面向开放环境的自适应感知,针对应用场景变换易导致智能系统性能急剧下降问题,发展适应能力强的层次化网络结构、可连续学习的机器学习策略及一般性效能度量方法,突破无监督学习、经验记忆利用、内隐知识发现与引导及注意力选择等难点,研究基于跨媒体的人类常识知识形成的机器学习新方法,并在常识知识支持下对跨媒体数据进行自底向上的深度抽象和归纳,有效管控不确定性的自顶向下演绎和推理,建立符号逻辑推理、归纳学习和直觉顿悟相互协调补充的新模型和方法,支持跨媒体知识的不一致性分析,针对人类经济活动、人机对抗等非完全信息条件下的博弈特点,结合机器学习、控制论、博弈论等领域进展,研究不确定复杂环境下的动力学机制,将对抗学习、强化学习与动态博弈论进行融合,博弈。
本发明中,优选的,所述步骤二,各个传感器节点分类识别该信号,并将信号进行分类,将分类后的信号传输至不同的处理器中,研究基于跨媒体的人类常识知识形成的机器学习新方法,并在常识知识支持下对跨媒体数据进行自底向上的深度抽象和归纳,有效管控不确定性的自顶向下演绎和推理,建立符号逻辑推理、归纳学习和直觉顿悟相互协调补充的新模型和方法,针对人类经济活动、人机对抗等非完全信息条件下的博弈特点,结合机器学习、控制论、博弈论等领域进展,研究不确定复杂环境下的动力学机制,将对抗学习、强化学习与动态博弈论进行融合,本发明通过设置人在回路的混合增强智能,研究不确定性、脆弱性和开放性条件下的任务建模、环境建模和人类行为建模,发展人在回路的机器学习方法及混合增强智能评价方法,把人对复杂问题分析与响应的高级认知机制与机器智能系统紧密耦合,有效避免由于人工智能技术的局限性引发的决策风险和系统失控。
本发明中,优选的,所述步骤三,面向离散制造业和流程工业中复杂多维度人机物协同问题,研究跨层、跨域的分布式网络化协同控制方法,突破人机物三元协同决策与优化理论,实现人机物的虚实融合与动态调度,探索无人加工生产线的重构及人机共融智能交互等,本发明通过设置认知任务下的场景主动感知技术,针对复杂环境中的自主定位、目标搜寻、场景分析和解释等认知要求,研究自然场景的主动视觉感知、三维环境动态建模和定位技术;研究复杂场景中声学环境探测与基于听觉反馈机理的言语主动感知技术;研究视听觉协同的从自然场景主动发现新目标及其属性知识的认知技术。
本发明中,优选的,所述步骤四,利用贝叶斯公式将节点的可靠性分解为节点的互信度与可信度,从节点的监测结果相互支持、节点监测结果的不确定性、节点的历史分类正确率、节点接收目标信号的信噪比和环境影响等方面分别对节点的互信度和可信度进行了推导和建模,该模型涵盖了影响节点可靠性的各种因素,并对各种因素进行了合理分析和量化,实现了高可靠性的智能辅助决策,本发明通过设置人机协同软硬件技术研究,研究构造软硬件一体化的人机协同技术平台,研究适应真实世界情境理解与协同决策的模型与方法;研究人机协同中混合人类直觉、经验、行为的新型学习方法;研究环境和情景的自然理解、大规模知识的处理技术等。
本发明中,优选的,所述步骤五,包括函数加密生成装置,通过函数加密生成装置对函数进行加密,输入的随机种子和原始密钥,根据原始密钥生成R轮迭代计算所需的轮密钥,其中R轮迭代计算所需的轮密钥包括第r轮的轮密钥,R表示生成加密函数所需的迭代计算的轮数,R是正整数并且1≤r≤R;通过使用随机数产生器并且根据随机种子生成R轮迭代计算所需的仿射扩张掩码和R轮迭代计算所需的随机干扰数据,其中仿射扩张掩码用于将m比特数据仿射地变换成n比特数据,m和n是预设正整数,n>m,R轮迭代计算所需的仿射扩张掩码包括第r轮的仿射扩张掩码,并且R轮迭代计算所需的随机干扰数据包括第r轮的随机干扰数据以此完成对函数的加密。
本发明中,优选的,所述步骤六,建立智能基础支撑体系角度使新型感知器件与芯片可以模拟生物视、听、触、嗅等感知通道的信号处理和信息加工机理,研制新型感知器件、芯片以及相应的神经网络感知信息表示、处理、分析和识别算法模型,开发功能类似生物、性能超越生物的感知系统并实现功能验证,神经网络处理器关键标准与验证芯片设计支持训练和推理的神经网络计算指令集,制定神经网络表示与压缩标准,在此基础上开发高效基础算法库和接口标准,实现配套开发工具链,建立开放的、不依赖于具体芯片实现方式的芯片平台标准,实现软硬件系统接口的统一化,实现支持上述指令集、算法库、标准及开发接口的验证芯片和示例应用。
本发明中,优选的,所述步骤七,计算结束,回到步骤一开始下一次计算。
本发明中,优选的,所述利用贝叶斯公式ε=∑^n*εili(Iai+Ibi+Ici)/∑^n*li(Iai+Ibi+Ici)×100%,采用对称分量法,按照每一段线路各相流经的电量,计算出各自的三相不平衡度,然后以每一档线路的长度为加权,计算出整条线路的三相负荷统计不平衡度,式中:下标i=1.2...n,下标a、b和c分别表示变压器的三相,ε为线路的三相负荷统计不平衡度;εi为线路每一档线路的三相负荷不平衡度;li为线路每一档线路的长度;Iai,Ibi,Ici分别为线路每一档线路的各相电流大小。
本发明中,优选的,所述博弈,研究开放、动态、复杂环境下的大规模群体协作的组织架构、行为模式和激励机制,建立可表达、可计算、可调控的复合式激励算法,探索个体贡献汇聚成群体智能的涌现机理和演化规律,突破面向全局目标的群体智能演进方法和时空敏感的群体智能协同决策,研究不确定性、脆弱性和开放性条件下的任务建模、环境建模和人类行为建模,发展人在回路的机器学习方法及混合增强智能评价方法,把人对复杂问题分析与响应的高级认知机制与机器智能系统紧密耦合,有效避免由于人工智能技术的局限性引发的决策风险和系统失控,本发明通过设置无人系统自主智能精准感知与操控,针对海、陆、空、天无人平台等自主智能发展需求,研究无约束环境、资源受限条件下的基于多传感器信息融合的协同感知方法;研究复杂场景下多源异构感知对象快速精准的分割、检测、定位、跟踪和识别方法;研究大范围场景地图构建、自主定位、透彻感知与动态认知等语义建模和理解方法等;研究复杂环境下面向多任务的协同、柔顺、精准操控方法。
本发明的工作原理及使用流程:使用时,模拟信号,并建立信号模型,同时将信号传输至各个节点,各个传感器节点分类识别该信号,并将信号进行分类,将分类后的信号传输至不同的处理器中,计算机节点可信度,提供复杂制造环境下的协同控制与决策,计算节点可靠性,跨媒体内容管理、跨模态医疗分析等重大需求,实现可回溯、可解释的类人跨媒体智能推理系统,对计算出的函数进行加密处理,认知任务下的场景主动感知技术,建立智能基础支撑体系角度,进行下一次协同决策。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于多传感器信息融合的协同感知方法
- 一种基于多传感器信息融合的无人方程式赛车感知规划方法