一种节能可控智能永磁悬浮输送平台
文献发布时间:2023-06-19 11:26:00
一种节能可控智能永磁悬浮输送平台。
技术领域
本发明涉及输送设备技术领域,尤其是涉及一种节能可控智能永磁悬浮输送平台。
背景技术
随着技术经济的蓬勃发展,电子技术和生物技术也日新月异的不断进步,在半导体加工车间和生物实验室中,作业空间内的洁净度和温度直接影响产品的质量和实验的准确性。因此,在这类无尘恒温空间中,必须采用除尘及温控设备,而产品及样品的传送要求采用无尘洁净传送系统。当前,实际应用的传送系统大多采用AGV、机械手、配有防尘结构的传送设备等,此类传统机械设备均存在机械摩擦、需油脂润滑,因此会有油污、金属粉尘及噪声的产生。
磁悬浮是一种以磁力为支撑力的非接触支撑技术,其优势为无机械接触摩擦、无需润滑、响应快、易于实现多自由度驱动等,已被成功应用于磁悬浮列车川、超高速磁力轴承凹、微动平台、飞轮储能电池等领域。
由于电磁悬浮装置中电磁线圈体积大,存在易发热,成本高,使之结构尺寸大且能耗高等问题。
发明内容
有鉴于此,有必要提供一种结构简单、使用方便的节能可控智能永磁悬浮输送平台。
为了解决上述技术问题,本发明的技术方案是:一种节能可控智能永磁悬浮输送平台,包括输送带、两个滚筒和悬浮装置,所述输送带转动连接在两个滚筒上,其中一个滚筒通过一第一电机驱使转动,所述滚筒周侧壁固定连接有若干个第一永磁体,相邻第一永磁体朝向输送带的磁极相反;所述输送带内表面固定连接有若干个第二永磁体,所述第二永磁体沿输送带内表面呈环形布置,相邻第二永磁体朝向滚筒的磁极相反;所述悬浮装置包括若干个分别位于输送带内上部和内下部的第三永磁体,所述第三永磁体通过一伺服电机驱使转动,所述第三永磁体跟随输送带转动,以使位于输送带内上部的第三永磁体朝向通过其正上方的输送带内上方的第一永磁体的磁极相同,位于输送带内下部的第三永磁体朝向通过其正下方的输送带内下方的第一永磁体的磁极相反。
进一步的,还包括传感器和控制模块,所述传感器用于监测悬浮装置与输送带之间间距的变化,所述控制模块接收传感器的信号并控制第一电机和伺服电机的运转。
进一步的,所述第三永磁体为柱形永磁体。
进一步的,所述第三永磁体转动连接在一导磁体内,所述导磁体具有转动连接第三永磁体的转动通道,所述导磁体还具有指向通过其正上方或正下方输送带上第一永磁体的两个导向部。
进一步的,所述滚筒转动连接在一机架上,该机架上固定连接有用于转动连接滚筒的轴承支架。
与现有技术相比,本发明具有以下有益效果:
1、滚筒与输送带之间存在斥力,使输送带在滚筒上悬浮起来,实现无接触悬浮。滚筒在转动过程中,为输送带提供牵引力,代替了原有的摩擦提供的驱动力,大幅度降低能量的损耗和皮带的磨损,节省了大量的费用。
2、通过直流伺服减速电机直连驱动柱形第三永磁体,通过控制第三永磁体的回转改变磁路中的磁通量来控制每一点的悬浮力协调实时控制,保证输送带的非接触悬浮。当输送带与悬浮装置的距离过大或过小时,通过第三永磁体的转动来调节悬浮力的大小,实现智能控制。
3、全程无接触悬浮,系统几乎无磨损;运行阻力小,能耗小;振动小,低噪音,扬尘少,运行平稳等优点。与其他结构的磁悬浮带式输送机相比,可实现智能控制,结构更加简单,能耗进一步降低,系统造价与维护成本也更加低廉。
为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附图式,作详细说明。
附图说明
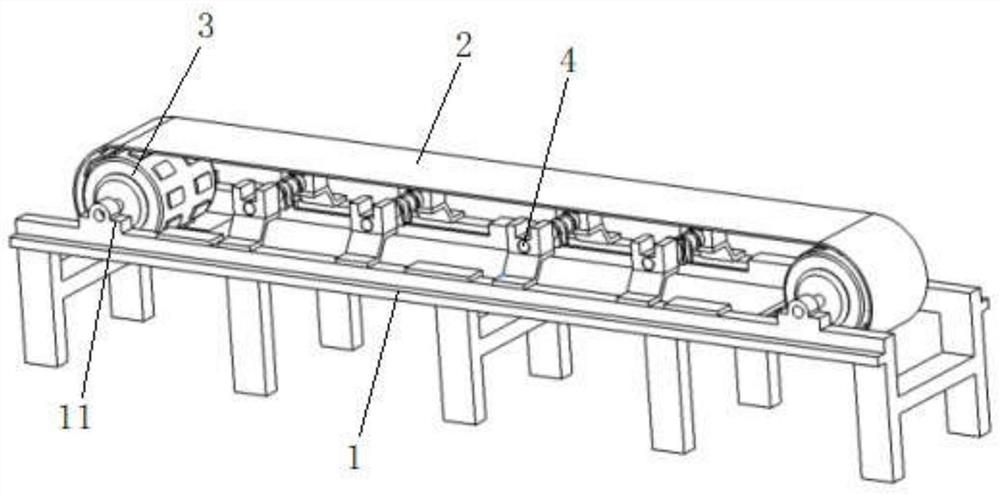
图1为本发明实施例的结构示意图。
图2为本发明实施例中输送带的结构示意图。
图3为本发明实施例中悬浮装置的结构示意图。
图4为本发明实施例中滚筒的结构示意图。
图中:1-机架,11-轴承支架,2-输送带,21-第二永磁体,3-滚筒,31-第一永磁体,4-悬浮装置,41-伺服电机,42-第三永磁体,43-导磁体,44-安装支架。
具体实施方式
为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、特征及其功效作详细说明。
如图1-4所示,一种节能可控智能永磁悬浮输送平台,包括机架1,输送带2、两个滚筒3和悬浮装置4,输送带2转动连接在两个滚筒3上,其中一个滚筒通过一第一电机驱使转动。
机架1上固定连接有用于转动连接滚筒3的轴承支架11。
滚筒3周侧壁固定连接有若干个第一永磁体31,相邻第一永磁体31朝向输送带2的磁极相反;输送带2内表面固定连接有若干个第二永磁体21,第二永磁体21沿输送带内表面呈环形布置,相邻第二永磁体21朝向滚筒的磁极相反。通过电机带动滚筒3,滚筒3和输送带2上永磁体的磁极方向的设置,使得滚筒3和输送带2之间能够同步转动,输送带2上的一个第二永磁体对滚筒的一个第一永磁体是吸力作用,其相邻的两个第二永磁体正好极性相反是斥力作用,从而滚筒上的第一永磁体与输送带上的第二永磁体同步转动。
悬浮装置4包括若干个分别位于输送带内上部和内下部的第三永磁体42,第三永磁体42通过一伺服电机41驱使转动,第三永磁体42为柱形永磁体,第三永磁体42转动连接在一导磁体43内,导磁体43具有转动连接第三永磁体42的转动通道,导磁体43还具有指向通过其正上方或正下方输送带上第一永磁体的两个导向部,导磁体通过一安装支架44固定连接在机架1上。第三永磁体52跟随输送带2转动,以使位于输送带内上部的第三永磁体朝向通过其正上方的输送带内上方的第一永磁体的磁极相同,位于输送带内上部的第三永磁体对其上方通过的输送带内上部产生斥力进而使输送带上部悬浮;位于输送带内下部的第三永磁体朝向通过其正下方的输送带内下方的第一永磁体的磁极相反,位于输送带内下部的第三永磁体对其下方通过的输送带内下部产生吸力进而使输送带下部克服部分重力悬浮。
还包括传感器和控制模块,传感器用于监测悬浮装置与输送带之间间距的变化,控制模块接收传感器的信号并控制第一电机和伺服电机的运转。
导磁体安装于第三永磁铁两侧,其材料为低矫顽力的铍莫合金,可实现快速充退磁。第三永磁体的一部分磁感线由N极出发,经过导磁体的一导向部,作用在其上方或下方通过的输送带上的第二永磁体,然后经过导磁体的另一导向部,最终回到第三永磁体的S极。此时,输送带和导磁体之间产生悬浮力,随着第三永磁铁的转角不断增大,经过输送带的磁感线会变化,悬浮力也会随之变化。系统通过传感器检测输送带与导磁体之间的间隙。当间隙过大或过小时,通过伺服电机来转动第三永磁铁,控制悬浮力的变化,实现对输送带悬浮状态的智能控制。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种节能可控智能永磁悬浮输送平台
- 一种可控制智能磁悬浮带式输送机