一种清洁系统
文献发布时间:2023-06-19 11:27:38
技术领域
本申请属于清洁技术领域,尤其涉及一种清洁系统。
背景技术
集尘站具有充电和排尘功能,当扫地机器人电量不足时,可以返回集尘站进行充电,当扫地机器人的尘盒需要排尘时,扫地机器人返回集尘站排尘,将尘盒内的垃圾排入集尘站内。相关技术中,扫地机器人返回集尘站后,在同一位置下可以同步进行充电和排尘。该种方式,集尘站与不同型号的扫地机器人的兼容性较差。
发明内容
有鉴于此,本申请实施例期望提供一种对扫地机器人兼容性较好的清洁系统。
本申请实施例提供一种清洁系统,包括:
集尘站,所述集尘站设置有吸入口和电能输出单元;
扫地机器人,所述扫地机器人配置有排尘口以及电能输入单元;所述扫地机器人与所述集尘站的配合状态包括充电状态和排尘状态,在所述充电状态,所述电能输入单元向所述电能输出单元传输电能,在所述排尘状态,所述排尘口与所述吸入口连通,所述扫地机器人在充电状态下相对所述集尘站的位置和在排尘状态下相对所述集尘站的位置不同。
一些实施方案中,所述集尘站包括相互连接的集尘站机身以及用于承载所述扫地机器人的底座;
所述扫地机器人能够前进行驶到所述底座上的第一预设位置,所述第一预设位置为所述扫地机器人处于所述充电状态或所述排尘状态的其中一个状态对应的位置,所述扫地机器人能够后退行驶到所述底座上的第二预设位置,所述第二预设位置为所述扫地机器人处于所述充电状态或所述排尘状态的其中另一个状态对应的位置。
一些实施方案中,在所述集尘站的俯视投影中,沿所述扫地机器人驶入或驶离所述集尘站的方向,所述吸入口和所述电能输出单元之间的距离大于或小于所述排尘口和所述电能输入单元之间的距离。
一些实施方案中,所述集尘站包括相互连接的集尘站机身以及用于承载所述扫地机器人的底座,所述底座远离所述集尘站机身的一端设置有用于引导所述扫地机器人驶入或驶离所述底座的斜坡。
一些实施方案中,所述扫地机器人包括机体、凸出于所述机体底侧的导向轮以及多个行走驱动轮,所述导向轮位于所述行走驱动轮的转动轴线的后方,所述导向轮具有预设离地间隙,在所述扫地机器人后退行驶至所述底座上的过程中,所述导向轮能够与所述斜坡滚动接触。
一些实施方案中,所述集尘站包括相互连接的集尘站机身以及用于承载所述扫地机器人的底座,所述底座与所述集尘站机身可拆卸连接,所述吸入口和所述电能输出单元的其中之一设置于所述集尘站机身上,其中另一设置于所述底座上。
一些实施方案中,所述扫地机器人包括机体、凸出于所述机体底侧的行走驱动轮;在所述扫地机器人的俯视投影中,所述电能输入单元位于所述行走驱动轮的转动轴线的前方,所述排尘口位于所述行走驱动轮的转动轴线的后方。
一些实施方案中,所述扫地机器人包括凸出于所述机体底侧的万向轮,所述万向轮位于所述行走驱动轮的转动轴线的前方,所述电能输入单元包括一对充电端子,一对所述充电端子设置于所述万向轮的左右两侧。
一些实施方案中,所述机体包括主体部以及可拆卸地设置于所述主体部的尾端的尘盒,所述排尘口设置于所述尘盒的后侧表面。
一种上述任一实施例的清洁系统的控制方法,包括:
当确定所述扫地机器人需要充电,控制所述扫地机器人前进行驶至所述集尘站的第一预设位置;
当确定所述扫地机器人需要排尘,控制所述扫地机器人后退行驶至所述集尘站的第二预设位置。
本申请实施例的清洁系统,由于在扫地机器人排尘时,只需要将排尘口与集尘站上的吸入口导通即可,无需考虑此时的电能输入单元和电能输出单元之间是否匹配,且在扫地机器人进行充电时,只需将电能输入单元和电能输出单元的位置进行匹配,无需考虑此时的排尘口与集尘站上的吸入口的相对位置关系,因此,即使扫地机器人的型号不同,不同型号的扫地机器人之间也可以共用同一个集尘站,扩大集尘站对不同型号的扫地机器人的适用范围。
附图说明
图1为本申请一实施例的清洁系统的结构示意图,其中,扫地机器人处于充电状态;
图2为图1所示结构另一视角的示意图;
图3为图1所示结构另一状态下的示意图,其中,扫地机器人处于排尘状态;
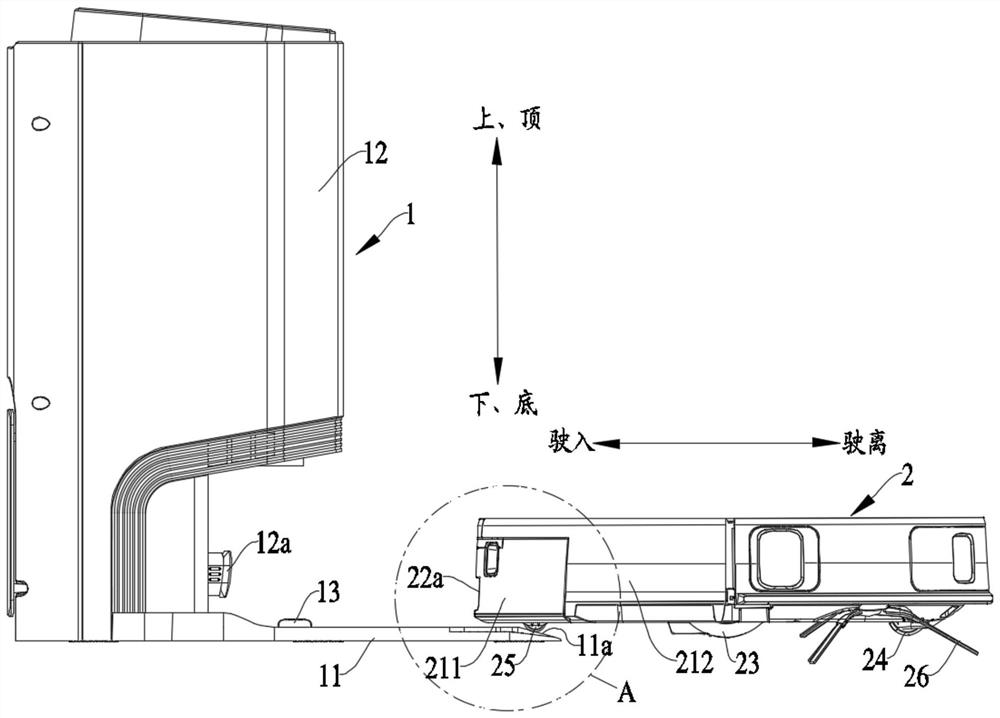
图4为图3所示清洁系统中的扫地机器人后退驶向集尘站的示意图;
图5为图4中A处的局部放大示意图;
图6为图1中的集尘站的结构示意图;
图7为图1中的扫地机器人的结构示意图;
图8为图7所示结构另一视角的示意图;
图9为图7所示结构再一视角的示意图;
图10为本申请一实施例的扫地机器人的尘盒的结构示意图;
图11为图10所示结构另一视角的示意图。
附图标记说明
集尘站1;底座11;斜坡11a;防滑凸起阵列11b;集尘站机身12;吸入口12a;电能输出单元13;扫地机器人2;机体21;尘盒211;排尘口211a;抽气口211b;气流入口211c;后侧表面211d,顶盖2111;主体部212;行走驱动轮23;万向轮24;导向轮25;边刷26;吸尘口21a;滚刷27;电能输入单元28
具体实施方式
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的技术特征可以相互组合,具体实施方式中的详细描述应理解为本申请宗旨的解释说明,不应视为对本申请的不当限制。
在本申请实施例的描述中,“上”、“下”、“左”、“右”、“前”、“后”方位或位置关系为基于附图7所示的方位或位置关系,需要理解的是,这些方位术语仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的限制。
本申请实施例中,“俯视”指的是附图4中从上往下的方位。前后方向指的是在同一个平面内,垂直于行走驱动轮的转动中心线的方向。
“前进行驶”指的是扫地机器人的头端朝向参考点行驶;“后退行驶”指的是扫地机器人的尾端朝向参考点行驶。
本申请实施例提供一种清洁系统,请参阅图1至图4,包括集尘站1和扫地机器人2,集尘站1设置有吸入口12a和电能输出单元13。
请参阅图7至图9,扫地机器人2配置有排尘口211a以及电能输入单元28;扫地机器人2与集尘站1的配合状态包括充电状态和排尘状态,请参阅图1和图2,在充电状态,电能输出单元13向电能输入单元28输送电能,以对扫地机器人2充电;请参阅图3,在排尘状态,排尘口211a与吸入口12a连通,扫地机器人2收集的灰尘等杂质经排尘口211a、吸入口12a进入集尘站1内。
示例性地,扫地机器人2配置有用于容纳垃圾的尘盒211,排尘口211a设置于尘盒211上。
示例性地,集尘站1的内部配置有风机、垃圾容置腔、以及风道,风道连通吸入口12a和垃圾容置腔。当需要扫地机器人2排尘,启动风机,风道内形成负压,由于吸入口12a与排尘口211a连通,因此,扫地机器人2的尘盒211内也形成负压,尘盒211内的垃圾在负压作用下被吸入风道进而暂存于垃圾容置腔内。
扫地机器人2在清扫地面的过程中,尘盒211内的空间可以处于正压、也可以处于负压,在此不做限制。需要说明的是,扫地机器人2在清扫地面的过程中,排尘口211a处于关闭状态,尘盒211内的气流基本不会从排尘口211a逸出。
可以理解的是,垃圾容置腔的容积大于尘盒211的容积,因此能够容纳扫地机器人2执行多次清扫任务收集的垃圾,用户只需集中清理集尘站的垃圾容置腔内的垃圾即可,无需每次清理扫地机器人2的尘盒211。
扫地机器人2在充电状态下相对集尘站1的位置和在排尘状态下相对集尘站1的位置不同。也就是说,扫地机器人2不会在同一个位置下同时进行充电和排尘,具体地,当电能输入单元28与电能输出单元13的位置匹配时,排尘口211a和吸入口12a无需处于导通的位置;当排尘口211a和吸入口12a处于导通的位置时,电能输入单元28与电能输出单元13无需处于匹配的位置。
当扫地机器人2需要充电时,扫地机器人2驶向集尘站1对应于充电状态的充电位置,集尘站1的电能输出单元13为扫地机器人2的电能输入单元28输送电能。当扫地机器人2需要排尘时,扫地机器人2驶向集尘站1对应于排尘状态的排尘位置,启动风机,将尘盒211内的垃圾吸入集尘站1内。
可以理解的是,不同型号的扫地机器人的排尘口和电能输入单元之间的相对位置关系可能不同。本申请实施例的清洁系统,由于在扫地机器人2排尘时,只需要将排尘口211a与集尘站1上的吸入口12a导通即可,无需考虑此时的电能输入单元28和电能输出单元13之间是否匹配,且在扫地机器人2进行充电时,只需将电能输入单元28和电能输出单元13的位置进行匹配,无需考虑此时的排尘口211a与集尘站1上的吸入口12a的相对位置关系,因此,即使扫地机器人2的型号不同,不同型号的扫地机器2人之间也可以共用同一个集尘站1,扩大集尘站1对不同型号的扫地机器人2的适用范围。
本申请实施例的清洁系统,扫地机器人2上的电能输入单元28和排尘口211a的相对位置不需要受到集尘站1上的电能输出单元13和吸入口12a的位置关系的约束,因此,扫地机器人2上的电能输入单元28和排尘口211a的相对位置关系可以进行灵活设计,例如,可以将扫地机器人2上的电能输入单元28的位置设计在与其他普通的充电座相兼容的位置,在扫地机器人2的尘盒211的适当位置处开设排尘口211a,在集尘站1上的对应位置设置吸入口12a即可,也就是说,无论尘盒211设置在扫地机器人2的中部还是尾部,均可方便地在尘盒211上设置排尘口211a,因此,本申请实施例的清洁系统,可以对在原有技术的扫地机器人2的基础上进行较小的改进,即可适用集尘站的技术。
需要说明的是,电能输出单元13和电能输入单元28之间的电能传输方式不限,可以采用有线充电,也可以是无线充电。其中,有线充电指的是传统的导电接触式充电,即电能输出单元13和电能输入单元28之间导电接触,两者共同接入同一个闭合的电路中。无线充电指的是依靠磁场传送能量,电能输出单元13和电能输入单元28之间不用导电接触。无线充电的具体方式不限,例如可以采用电磁感应式充电,也可以采用谐振式充电,在此不做限定。
示例性地,在采用有线充电的实施例中,电能输出单元13包括一对正负电极,电能输入单元28包括一对充电端子,该充电端子示例性地为金属弹片。充电时,正电极与其中一个充电端子导电接触,负电极与另一个充电端子导电接触。
示例性地,在采用电磁感应无线充电的实施例中,电能输出单元13包括发射端线圈,电能输入单元28包括接收端线圈。发射端线圈通电时产生电磁信号,接收端线圈感应发射端的电磁信号从而产生电流,从而实现对扫地机器人2充电。
扫地机器人2的具体结构形式不限。
示例性地,请参阅图7至图9,扫地机器人2包括机体21以及凸出于机体21底侧的多个行走驱动轮23。机体21大致呈圆盘状。行走驱动轮23的数量不限,可以是两个或者大于两个。本申请中,行走驱动轮23的数量为两个,两个行走驱动轮23同轴布置。需要说明的是,所述的两个行走驱动轮23同轴布置指的是,当两个行走驱动轮23均为圆形轮子时,两个行走驱动轮23的转动中心线在同一直线上;当两个行走驱动轮23为履带式行走轮时,两个履带式行走轮的主动轮的转动中心线位于第一直线上,两个履带式行走轮的从动轮的转动中心线位于第二直线上,第一直线和第二直线相互间隔且平行。
示例性地,请参阅图8和图9,扫地机器人2包括凸出于机体21底侧的万向轮24,万向轮24位于行走驱动轮23的转动轴线的前方,万向轮24可以起到支撑机体21和转向的作用。万向轮24的数量可以是一个或两个。
示例性地,万向轮24的数量为一个。万向轮24可以位于两个行走驱动轮23的转动中心的连线上中垂线上,也可以偏离中垂线较小的距离。两个行走驱动轮23和一个万向轮24对机体21形成三点稳定支撑。其中,两个行走驱动轮23为主动轮,万向轮24为从动轮。示例性地,请参阅图9,扫地机器人2还包括设置于机体21底部的边刷26,边刷26的数量可以是一个,也可以是两个。
示例性地,请继续参阅图9,机体21的底表面设置有吸尘口21a,扫地机器人2包括滚刷27,滚刷27的刷毛从吸尘口21a处伸出。示例性地,滚刷27沿机体21的左右方向延伸。
电能输入单元28在机体21底侧的具体位置不限,示例性地,在电能输入单元28包括一对充电端子的实施例中,一对充电端子设置于万向轮24的左右两侧。
机体21包括主体部212以及可拆卸地设置于主体部212上的尘盒211。用户根据使用需要,将尘盒211从主体部212上拆卸下来进行清理、冲洗等。
请参阅图11,尘盒211设置有气流入口211c以及抽气口211b,气流入口211c与吸尘口21a连通。扫地机器人2执行清扫作业过程中,风机等装置不断地从抽气口211b抽吸空气,使得尘盒211内形成负压,进而使得吸尘口21a周围也形成负压环境,地面上的灰尘、毛发等垃圾被吸入尘盒211内,并被拦截在尘盒211内。
可以理解的是,尘盒211可以设置在主体部212的任意适当的位置,例如,设置在主体部212的尾部,该实施例中,尘盒211和主体部212共同构成机体21的周向轮廓;另一些实施例中,主体部212沿前后方向的大致中部的位置设置有用于容纳尘盒211的安装腔,尘盒211可从主体部212的上方置入安装腔中,或者安装腔中取出,该实施例中,主体部212的周向轮廓即为机体21的周向轮廓。
本申请实施例中,以尘盒211设置于主体部212的尾部为例进行说明。主体部212的后侧的下方设置有安装空缺,尘盒211从主体部212的后方可拆卸地置入安装空缺内。尘盒211的后侧表面暴露于外部视野,使得尘盒211的后侧表面作为扫地机器人2的外观表面。该实施例中,排尘口211设置于尘盒211的后侧表面211d,一方面,排尘口211对扫地机器人2的外观影响相对较小,另一方面,使得设置尘盒211设置于主体部212后部的扫地机器人2也能匹配集尘站1进行排尘。
示例性地,请参阅图11,尘盒211的顶部设置有顶盖2111,用户取出尘盒211,打开顶盖2111,将尘盒211内部的垃圾倾倒出来,或者对尘盒211进行冲洗等操作,也就是说,扫地机器人2可以通过集尘站1进行自主排尘,也可以供用户进行手动排尘、清洁等。
需要说明的是,尘盒211的顶表面被主体部211的顶表面遮挡,使得尘盒211的顶表面不会暴露于外部视野,避免顶盖影响扫地机器人2的外观面。请参阅图1至图6,集尘站1包括相互连接的集尘站机身12以及用于承载扫地机器人2的底座11,底座11的第一端与集尘站1连接,扫地机器人2从底座11远离集尘站1的第二端驶入或驶出底座11。
吸入口12a的设置位置不限,例如,吸入口12a可以设置在集尘站机身12的侧壁上,也可以设置在底座11上。在吸入口12a设置在底座11上的实施例中,吸入口12a避开万向轮24的行走路径,避免万向轮24陷入吸入口12a内。
电能输出单元13的设置位置不限,例如,电能输出单元13可以设置在集尘站机身12上,也可以设置在底座11上,只要电能输出单元13不会与吸入口12a发生干涉即可。
集尘站机身12与底座11的具体连接方式不限,可以是以不可拆卸的方式连接,例如,焊接、铆接等;也可以是可拆卸连接,例如,卡接、螺钉连接、螺栓连接等。
示例性地,底座11与集尘站机身12可拆卸连接,吸入口12a和电能输出单元13的其中之一设置于集尘站机身12上,其中另一设置于底座11上。该实施例中,在设计集尘站1的过程中,当扫地机器人2的吸入口12a的尺寸或位置发生局部变化,或者扫地机器人2的电能输出单元13的尺寸或位置发生局部变化,仅需更新对应的底座11或集尘站机身12的设计即可,而不需要底座11和集尘站机身12两者同步更新设计,如此能够降低产品设计成本,也能提升不同型号的集尘站1之间的零部件的通用化率,减小企业的呆滞物料库存压力。
具体地,一些实施例中,吸入口12a设置于集尘站机身12上,电能输出单元13设置于底座11上,该实施例中,底座11上只需埋设电线和电能输出单元13即可,结构相对简单,底座11的厚度可以控制在较小尺寸,在不同的底座11与集尘站机身12匹配时,只需考虑电线接线即可。另一些实施例中,吸入口12a设置在底座11上,电能输出单元13设置在集尘站机身12上。
一些实施例中,扫地机器人2能够前进驶到底座11上的第一预设位置,其中,第一预设位置为扫地机器人2处于充电状态或排尘状态的其中一个状态对应的位置,;扫地机器人2能够后退行驶到底座11上的第二预设位置,其中,第二预设位置为扫地机器人2处于充电状态或排尘状态的其中另一个状态对应的位置。
需要说明的是,第一预设位置和第二预设位置均指的是,底座11上的对应于行走驱动轮23的停靠位置。
第一预设位置和第二预设位置可以相同,也可以不同。具体地,一些实施例中,第一预设位置为扫地机器人2处于充电状态对应的位置,第二预设位置为扫地机器人2处于排尘状态对应的位置。当扫地机器人2需要充电时,扫地机器人2前进驶向集尘站1的底座11的第一预设位置,即扫地机器人2驶向集尘站1的过程中,扫地机器人2的头部朝向集尘站1。当扫地机器人2需要排尘时,扫地机器人2则后退驶向集尘站1的底座11的第二预设位置即扫地机器人2驶向集尘站1的过程中,扫地机器人2的尾部朝向集尘站1。
另一些实施例中,第一预设位置为扫地机器人2处于排尘状态对应的位置,第二预设位置为扫地机器人2处于充电状态对应的位置。当扫地机器人2需要充电时,扫地机器人2后退驶向集尘站1的底座的第二预设位置,即扫地机器人2驶向集尘站1的过程中,扫地机器人2的尾部朝向集尘站1。当扫地机器人2需要排尘时,扫地机器人2则前进驶向集尘站1并到达排尘状态,即扫地机器人2驶向集尘站1的过程中,扫地机器人2的头部朝向集尘站1。
一些实施例中,扫地机器人2沿同一行驶方向在底座11上行驶不同的距离,以实现不同在充电状态和排尘状态下相对集尘站1的位置不同。例如,扫地机器人2在底座11上沿前进方向行驶第三距离,扫地机器人1处于充电位置,需要充电时,接通电源,即可进行充电;如果不需要充电,扫地机器人在上述充电位置的基础上继续前进一段距离至排尘位置。再例如,扫地机器人2在底座11上沿后退方向行驶第四距离,扫地机器人1处于充电位置,需要充电时,接通电源,即可进行充电;如果不需要充电,扫地机器人在上述充电位置的基础上继续后退一段距离至排尘位置。
一些实施例中,在集尘站1的俯视投影中,沿扫地机器人2驶入或驶离集尘站1的方向,吸入口12a和电能输出单元13之间的距离与排尘口211a和电能输入单元28之间的距离不同。该实施例中,当吸入口12a和排尘口211a对接时,电能输出单元13和电能输入单元28错开布置;当电能输出单元13和电能输入单元28充电配合时,吸入口12a和排尘口211a错开布置。
具体地,吸入口12a和电能输出单元13之间的距离为第一距离,排尘口211a和电能输入单元28之间的距离为第二距离。可以理解的是,第一距离可以小于第二距离,可以大于第二距离,只要两者不同即可。
示例性地,集尘站1的俯视投影中,沿扫地机器人2驶入或驶离集尘站1的方向,吸入口12a和电能输出单元13之间的距离小于排尘口211a和电能输入单元28之间的距离。该实施例中,可以将吸入口12a和电能输出单元13之间的距离设计得较小,以使得集尘站1的结构布局相对紧凑,而使得排尘口211a和电能输入单元28之间的距离相对较大,以便于扫地机器人2的结构布置更加灵活。
一些实施例中,在扫地机器人2的俯视投影中,电能输入单元28位于行走驱动轮23的转动轴线的前方,排尘口211a位于行走驱动轮23的转动轴线的后方。
可以理解的是,在吸入口12a设置于集尘站机身12的侧壁的实施例中,排尘口211a设置于扫地机器人2的尾部的周向表面。扫地机器人2倒退驶入底座11上直至排尘口211a和吸入口12a对接,如此便于排尘口211a和吸入口12a进行可靠对接,也便于对扫地机器人2在底座11上的停靠位置进行定位。
可以理解的是,在电能输出单元13设置于底座11上的实施例中,电能输入单元28大致位于机体21的底侧,当扫地机器人2驶入底座11的顶表面并使得电能输入单元28和电能输出单元13相配合,电能输出单元13能够从扫地机器人2的底侧向电能输入单元28传输电能。
一些实施例中,请参阅图5和图6,底座11远离集尘站机身12的一端设置有用于引导扫地机器人2驶入或驶离底座11的斜坡11a。可以理解的是,底座11具有一定的厚度,斜坡11a能够便于扫地机器人2较为容易地、平稳地驶入或驶离底座11。
一些实施例中,请继续参阅图6,底座11的顶表面设置有防滑凸起阵列11b,防滑凸起阵列11b延伸至斜坡11a处,扫地机器人2驶入或驶离底座11的过程中,行走驱动轮23始终行走在防滑凸起阵列11b上,以降低行走驱动轮23打滑的可能性。
一些实施例中,请参阅图9,扫地机器人2包括凸出于机体21底侧的导向轮25,导向轮25位于行走驱动轮23的转动轴线的后方,导向轮25具有预设离地间隙,请参阅图4和图5,当扫地机器人2后退行驶到底座11的过程中,导向轮25能够与斜坡11a滚动接触。
所述的导向轮25具有预设离地间隙指的是,当扫地机器人2支撑在平整地面上时,导向轮25不与平整的地面接触。
需要说明的是,扫地机器人2的机身21的离地间隙较小,甚至小于底座11的厚度,当扫地机器人2前进驶向底座11的过程中,扫地机器人2的机身21的底侧的前部有万向轮24支撑并引导爬上斜坡11a,扫地机器人2的机身21基本不会与斜坡11a产生剐蹭;在扫地机器人2后退行驶至底座11的顶表面的过程中,导向轮25与斜坡11a滚动接触,以抬升扫地机器人2的机身21,降低扫地机器人2的机身21与底座11剐蹭的可能性。
需要说明的是,所述的在扫地机器人2后退行驶至底座11的顶表面的过程中,导向轮25与斜坡11a滚动接触指的是,在整个过程中的一部分时间段内导向轮25与斜坡11a滚动接触,并不是说导向轮25和斜坡11a始终处于滚动接触的状态。
导向轮25的数量不限,可以是一个,也可以是两个或大于两个。示例性地,本申请实施例中,导向轮25的数量为两个,两个导向轮25沿机身21底侧的左右方向布置,以平稳地抬升扫地机器人2的机身21。
可以理解的是,导向轮25的设置位置可以尽量靠近扫地机器人2的机身21的底侧的后部,在扫地机器人2后退爬上斜坡11a的过程中,导向轮25可以尽早与斜坡11a接触,进一步降低机身21被底座11剐蹭的可能性。
示例性地,本申请实施例中,请参阅图10,导向轮25设置于尘盒211的底侧,降低尘盒211被剐蹭的可能性。
示例性地,导向轮25的滚动表面可以设置柔性材质层,比如TPE(ThermoplasticElastomer,热塑性弹性体),橡胶,纺织品等,降低导向轮25擦坏底座11的表面的可能性。
本申请实施例提供一种上述任一实施例的清洁系统的控制方法,控制方法包括:
当确定扫地机器人2需要充电,控制扫地机器人2前进行驶至集尘站1的第一预设位置;
当确定扫地机器人2需要排尘,控制扫地机器人2后退行驶至集尘站1的第二预设位置。
该控制方法使得扫地机器人2在有不同的需求时,采用不同的行驶方式行驶至集尘站1的预定位置处,控制方式简单。
需要说明的是,可以是扫地机器人2或集尘站确定扫地机器人2需要充电。例如,一些实施例中,当扫地机器人2的电池电量低于某一数值时,比如,电池电量只剩下20%时,则扫地机器人2的控制系统自行确定扫地机器人2需要充电。另一些实施例中,扫地机器人2的控制系统将扫地机器人2的电池电量信息发送至集尘站1,集尘站1根据电池电量信息来识别扫地机器人2是否需要充电,比如,当电池电量只剩下20%时,则集尘站1确定扫地机器人2需要充电。
可以理解的是,可以是扫地机器人2或集尘站1确定扫地机器人2需要排尘。例如,一些实施例中,扫地机器人2将尘盒211内的垃圾容量信息发送至集尘站1,集尘站1根据垃圾容量信息确定扫地机器人2是否需要排尘,比如,当垃圾填充尘盒211理论容积的3/4,则确定扫地机器人2需要排尘。另一些实施例中,当尘盒211内的垃圾填充尘盒211理论容积的3/4,则扫地机器人2的控制系统自行确定扫地机器人2需要排尘。
本申请提供的各个实施例/实施方式在不产生矛盾的情况下可以相互组合。
以上所述仅为本申请的较佳实施例而已,并不用于限制本申请,对于本领域的技术人员来说,本申请可以有各种更改和变化。凡在本申请的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。
- 用于清洁在清洁系统中的清洁碱液的设备和用于清洁物体的清洁系统
- 车辆用清洁系统、车辆系统、基于车辆用清洁系统的清洗方法、车辆用清洁器控制装置