一种基于人工智能的建筑工程设计图纸悬挂设备
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及建筑设计技术领域,具体来说,涉及一种基于人工智能的建筑工程设计图纸悬挂设备。
背景技术
建筑设计是指建筑物在建造之前,设计者按照建设任务,把施工过程和使用过程中所存在的或可能发生的问题,事先作好通盘的设想,拟定好解决这些问题的办法、方案,用图纸和文件表达出来。
人工智能的英文缩写是AI,建筑工程设计图纸在设计完成之后,需要设计人员将设计图纸的设计思路对施工人员进行讲解,这就需要使用悬挂设备进行悬挂,同时目前的悬挂设备难以有效的与人工智能相结合,以实现人工智能化。
为此,提出一种基于人工智能的建筑工程设计图纸悬挂设备。
发明内容
本发明的技术任务是针对以上不足,特提出一种基于人工智能的建筑工程设计图纸悬挂设备,通过驱动机构,能够驱动该基于人工智能的建筑工程设计图纸悬挂设备的移动;通过主体机构、转动机构以及悬挂机构的相互配合,可以全程的捕捉并记录不同的使用者,无论使用者走到哪一个方位,始终能够使图纸朝向使用者,实现人工智能;通过主体机构与第一升降机构以及第二升降机构的相互搭配,可以使该基于人工智能的建筑工程设计图纸悬挂设备在面对不同身高的使用者时,对通过第一升降机构和第二升降机构的作用下,使悬挂机构进行既定高度的升降,以使悬挂机构的高度始终与使用者身高保持相同;圆盘可以具有防尘的作用,避免圆形通槽因开口过大而导致箱体内灰尘增多的情况;在第一磁石、第二磁石、第三磁石以及第四磁石吸附式的连接作用下,可以适配不同大小的设计图纸;在主体机构、悬挂机构、第一照明结构以及第二照明结构的相互搭配使用后,可以人工智能的对灯光进行调节,来解决上述问题。
本发明的技术方案是这样实现的:
一种基于人工智能的建筑工程设计图纸悬挂设备,包括:
驱动机构,所述驱动机构包括底座、第一万向轮、第二万向轮、第三万向轮、第四万向轮、第一手推杆以及第二手推杆,所述第一万向轮固定于底座底部前侧的一端,所述第二万向轮固定于底座远离第一万向轮底部前侧的另一端,所述第三万向轮固定于底座位于第一万向轮底部后侧的一端,所述第四万向轮固定于底座远离第三万向轮底部后侧的另一端,所述第一手推杆和第二手推杆分别固定于底座的顶部两侧;
主体机构,所述主体机构包括箱体、PLC控制器、圆形通槽、第一导向槽、第一导向块、第一安装板、第二导向槽、第二导向块以及第二安装板,所述箱体固定于所述底座的顶部,所述PLC控制器安装于箱体外壁前侧的下部,所述圆形通槽开设于箱体的顶部,所述第一导向槽开设于箱体的一侧外壁,所述第一导向块安装于第一导向槽内,所述第一安装板固定于箱体位于第一导向槽一侧外壁的顶部,所述第二导向槽开设于箱体远离第一导向槽的一侧外壁,所述第二导向块安装于第二导向槽内,所述第二安装板固定于箱体位于第二导向槽的一侧外壁顶部;
转动机构,所述转动机构包括支撑板、步进电机、环形滑轨、环形滑轨、第一弧形滑块、第二弧形滑块、第一连杆、第二连杆以及圆盘,所述支撑板安装于所述箱体的内腔,且所述支撑板的侧壁与箱体的内壁滑动连接,所述支撑板的一侧侧壁的中部与所述第一导向块的侧壁固定连接,所述支撑板远离第一导向块一侧的侧壁中部与所述第二导向块的侧壁固定连接,所述步进电机安装于支撑板的底部,且所述步进电机的输出轴贯穿于支撑板的顶部,所述圆杆垂直安装于支撑板的顶部,所述圆杆的一端与步进电机的输出轴固定连接,所述环形滑轨固定于支撑板的顶部,所述第一弧形滑块和第二弧形滑块分别安装于环形滑轨内,且所述第一弧形滑块与第二弧形滑块对称安装,所述第一连杆的一端安装于第一弧形滑块的顶部,所述第二连杆安装于第二弧形滑块的顶部,所述第一连杆和第二连杆远离环形滑轨的上端与所述圆形通槽的内壁滑动连接;
悬挂机构包括立板、铁板、第一磁石、第二磁石、第三磁石、第四磁石以及全景摄像头,所述立板的底部固定于所述圆杆远离步进电机的一端端部,所述立板的底部两端分别与所述第一连杆和第二连杆远离环形滑轨的一端端部固定连接,所述铁板贴合于立板表面,所述第一磁石、第二磁石、第三磁石以及第四磁石分别吸附连接于铁板的四端,所述全景摄像头安装于立板的顶部,所述立板的两侧壁分别安装有第一照明结构以及第二照明结构;
第一升降机构和第二升降机构,所述第一升降机构和第二升降机构分别安装于所述驱动机构的顶部两侧,且所述第一升降机构和第二升降机构分别位于所述主体机构的两侧。
作为优选,所述第一升降机构包括第三安装板、第一伺服电机以及第一螺纹杆,所述第三安装板固定于所述箱体的一侧外壁下部,所述第一伺服电机安装于第三安装板的底部,且所述第一伺服电机的输出轴贯穿于第三安装板的顶部,所述第一螺纹杆的一端与第一伺服电机的输出轴固定连接,所述第一螺纹杆的另一端贯穿于所述第二导向块、并与所述第二安装板的底部转动连接,所述第二升降机构包括第四安装板、第二伺服电机以及第二螺纹杆,所述第四安装板固定于所述箱体远离第三安装板一侧外壁的下部,所述第二伺服电机安装于第四安装板的底部,且所述第二伺服电机的输出轴贯穿于所述第四安装板的顶部,所述第二螺纹杆的一端与第二伺服电机的输出轴固定连接,所述第二螺纹杆远离第二伺服电机的一端贯穿于第一导向块,并与所述第一安装板的底部转动连接。
作为优选,所述第一升降机构还包括第一支腿以及第二支腿,所述第一支腿和第二支腿分别固定于所述第三安装板的底部两端,且所述第一支腿和第二支腿的底部一端均与所述底座的顶部固定连接。
作为优选,所述第二升降机构还包括第三支腿和第四支腿,所述第三支腿和第四支腿分别固定于所述第四安装板的底部两侧,且所述第三支腿和第四支腿的底部一端均与所述底座的顶部固定连接。
作为优选,所述第一照明结构包括第一空心板以及第一灯管,所述第一空心板安装于所述立板的一侧侧壁,所述第一灯管安装于第一空心板的内腔,所述第二照明结构包括第二空心板以及第二灯管,所述第二空心板安装于所述立板远离第一空心板的一侧侧壁,所述第二灯管安装于第二空心板的内腔。
作为优选,所述主体机构还包括方形通槽,所述方形通槽开设于所述箱体的外壁前侧的下部,所述PLC控制器插接安装于方形通槽内。
作为优选,所述全景摄像头的电控输出端通过导线与所述PLC控制器的电控输入端电性连接,所述PLC控制器的电控输出端与所述步进电机的电控输入端电性连接。
作为优选,所述全景摄像头的电控输出端通过导线与所述PLC控制器的电控输入端电性连接,所述PLC控制器的电控输出端通过导线与所述第一伺服电机的电控输入端电性连接,所述全景摄像头的电控输出端通过导线与所述PLC控制器的电控输入端电性连接,所述PLC控制器的电控输出端通过导线与所述第二伺服电机的电控输入端电性连接。
作为优选,所述全景摄像头的顶部还安装有光线传感器,所述光线传感器的信号输出端与所述PLC控制器的信号输入端信号连接,所述PLC控制器的电控输出端通过导线分别与所述第一灯管和第二灯管的电控输入端电性连接。
作为优选,所述第一升降机构还包括第一压力传感器以及第一橡胶柱,所述第一压力传感器安装于所述第三安装板的顶部,所述第一橡胶柱固定于所述第二导向块的底部,所述第一压力传感器的信号输出端与所述PLC控制器的信号输入端信号连接,所述第二升降机构还包括第二压力传感器以及第二橡胶柱,所述第二压力传感器安装于所述第四安装板的顶部,所述第二橡胶柱固定于所述第一导向块的底部,所述第二压力传感器的信号输出端与所述PLC控制器的信号输出端信号连接。
与现有技术相比,本发明的优点和积极效果在于:
1、本技术方案中,通过驱动机构,能够驱动该基于人工智能的建筑工程设计图纸悬挂设备的移动;
2、本技术方案中,通过主体机构、转动机构以及悬挂机构的相互配合,可以全程的捕捉并记录不同的使用者,无论使用者走到哪一个方位,始终能够使图纸朝向使用者,实现人工智能;
3、本技术方案中,通过主体机构与第一升降机构以及第二升降机构的相互搭配,可以使该基于人工智能的建筑工程设计图纸悬挂设备在面对不同身高的使用者时,对通过第一升降机构和第二升降机构的作用下,使悬挂机构进行既定高度的升降,以使悬挂机构的高度始终与使用者身高保持相同;
4、本技术方案中,在主体机构、悬挂机构、第一照明结构以及第二照明结构的相互搭配使用后,可以人工智能的对灯光进行调节;
5、本技术方案中,圆盘可以具有防尘的作用,避免圆形通槽因开口过大而导致箱体内灰尘增多的情况;
6、本技术方案中,在第一磁石、第二磁石、第三磁石以及第四磁石吸附式的连接作用下,可以适配不同大小的设计图纸。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
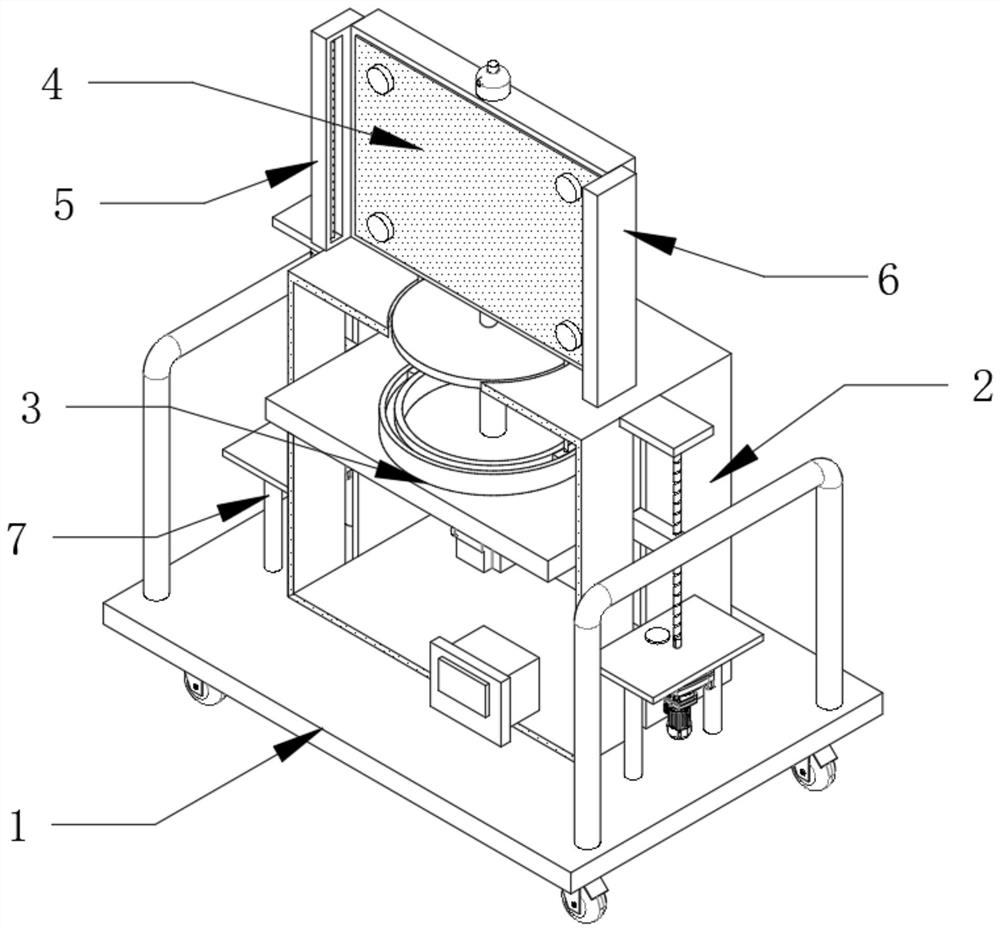
图1是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备剖面的立体结构示意图;
图2是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备的立体结构示意图;
图3是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备的底部视角的立体结构示意图;
图4是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备的主体机构的剖面的立体结构示意图;
图5是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备箱体的立体结构示意图;
图6是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备转动机构的立体结构示意图;
图7是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备悬挂机构的立体结构示意图;
图8是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第一照明结构的立体结构示意图;
图9是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第二照明结构的立体结构示意图;
图10是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备全景摄像头和光线传感器相组合的立体结构示意图;
图11是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第一升降机构的立体结构示意图;
图12是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第二导向块的底部视角的立体结构示意图;
图13是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第二升降机构的立体结构示意图;
图14是根据本发明实施例的基于人工智能的建筑工程设计图纸悬挂设备第一导向块的底部视角的立体结构示意图。
图中:
1、驱动机构;11、底座;12、第一万向轮;13、第二万向轮;14、第三万向轮;15、第四万向轮;16、第一手推杆;17、第二手推杆;
2、主体机构;21、箱体;22、方形通槽;23、PLC控制器;24、圆形通槽;25、第一导向槽;26、第一导向块;27、第一安装板;28、第二导向槽;29、第二导向块;210、第二安装板;
3、转动机构;31、支撑板;32、步进电机;33、环形滑轨;34、圆杆;35、第一弧形滑块;36、第二弧形滑块;37、第一连杆;38、第二连杆;39、圆盘;
4、悬挂机构;41、立板;42、铁板;43、第一磁石;44、第二磁石;45、第三磁石;46、第四磁石;47、全景摄像头;48、光线传感器;
5、第一照明结构;51、第一空心板;52、第一灯管;
6、第二照明结构;61、第二空心板;62、第二灯管;
7、第一升降机构;71、第三安装板;72、第一支腿;73、第二支腿;74、第一伺服电机;75、第一螺纹杆;76、第一压力传感器;77、第一橡胶柱;
8、第二升降机构;81、第四安装板;82、第三支腿;83、第四支腿;84、第二伺服电机;85、第二螺纹杆;86、第二压力传感器;87、第二橡胶柱。
具体实施方式
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和实施例对本发明做进一步说明。需要说明的是,在不冲突的情况下,本申请的实施例及实施例中的特征可以相互组合。
下面结合附图1-图14和具体实施例对本发明作进一步说明。
实施例1
如图1-7所示,根据本发明实施例的一种基于人工智能的建筑工程设计图纸悬挂设备,包括:
驱动机构1,驱动机构1包括底座11、第一万向轮12、第二万向轮13、第三万向轮14、第四万向轮15、第一手推杆16以及第二手推杆17,第一万向轮12固定于底座11底部前侧的一端,第二万向轮13固定于底座11远离第一万向轮12底部前侧的另一端,第三万向轮14固定于底座11位于第一万向轮12底部后侧的一端,第四万向轮15固定于底座11远离第三万向轮14底部后侧的另一端,第一手推杆16和第二手推杆17分别固定于底座11的顶部两侧;
主体机构2,主体机构2包括箱体21、PLC控制器23、圆形通槽24、第一导向槽25、第一导向块26、第一安装板27、第二导向槽28、第二导向块29以及第二安装板210,箱体21固定于底座11的顶部,PLC控制器23安装于箱体21外壁前侧的下部,圆形通槽24开设于箱体21的顶部,第一导向槽25开设于箱体21的一侧外壁,第一导向块26安装于第一导向槽25内,第一安装板27固定于箱体21位于第一导向槽25一侧外壁的顶部,第二导向槽28开设于箱体21远离第一导向槽25的一侧外壁,第二导向块29安装于第二导向槽28内,第二安装板210固定于箱体21位于第二导向槽28的一侧外壁顶部;
转动机构3,转动机构3包括支撑板31、步进电机32、环形滑轨33、环形滑轨33、第一弧形滑块35、第二弧形滑块36、第一连杆37、第二连杆38以及圆盘39,支撑板31安装于箱体21的内腔,且支撑板31的侧壁与箱体21的内壁滑动连接,支撑板31的一侧侧壁的中部与第一导向块26的侧壁固定连接,支撑板31远离第一导向块26一侧的侧壁中部与第二导向块29的侧壁固定连接,步进电机32安装于支撑板31的底部,且步进电机32的输出轴贯穿于支撑板31的顶部,圆杆34垂直安装于支撑板31的顶部,圆杆34的一端与步进电机32的输出轴固定连接,环形滑轨33固定于支撑板31的顶部,第一弧形滑块35和第二弧形滑块36分别安装于环形滑轨33内,且第一弧形滑块35与第二弧形滑块36对称安装,第一连杆37的一端安装于第一弧形滑块35的顶部,第二连杆38安装于第二弧形滑块36的顶部,第一连杆37和第二连杆38远离环形滑轨33的上端与圆形通槽24的内壁滑动连接;
悬挂机构4包括立板41、铁板42、第一磁石43、第二磁石44、第三磁石45、第四磁石46以及全景摄像头47,立板41的底部固定于圆杆34远离步进电机32的一端端部,立板41的底部两端分别与第一连杆37和第二连杆38远离环形滑轨33的一端端部固定连接,铁板42贴合于立板41表面,第一磁石43、第二磁石44、第三磁石45以及第四磁石46分别吸附连接于铁板42的四端,全景摄像头47安装于立板41的顶部,立板41的两侧壁分别安装有第一照明结构5以及第二照明结构6;
第一升降机构7和第二升降机构8,第一升降机构7和第二升降机构8分别安装于驱动机构1的顶部两侧,且第一升降机构7和第二升降机构8分别位于主体机构2的两侧。
采用上述技术方案的一种基于人工智能的建筑工程设计图纸悬挂设备由驱动机构1、主体机构2、转动机构3、悬挂机构4、第一照明结构5、第二照明结构6、第一升降机构7以及第二升降机构8构成;
其中,驱动机构1由底座11、第一万向轮12、第二万向轮13、第三万向轮14、第四万向轮15、第一手推杆16以及第二手推杆17构成;
其中,主体机构2由箱体21、PLC控制器23、圆形通槽24、第一导向槽25、第一导向块26、第一安装板27、第二导向槽28、第二导向块29以及第二安装板210构成,主体机构2还包括方形通槽22,方形通槽22开设于箱体21的外壁前侧的下部,PLC控制器23插接安装于方形通槽22内;
其中,转动机构3由支撑板31、步进电机32、环形滑轨33、环形滑轨33、第一弧形滑块35、第二弧形滑块36、第一连杆37、第二连杆38以及圆盘39构成;
其中,悬挂机构4由立板41、铁板42、第一磁石43、第二磁石44、第三磁石45、第四磁石46以及全景摄像头47构成,全景摄像头47的电控输出端通过导线与PLC控制器23的电控输入端电性连接,PLC控制器23的电控输出端与步进电机32的电控输入端电性连接;
上述驱动机构1的有益效果:通过驱动机构1,能够驱动该基于人工智能的建筑工程设计图纸悬挂设备的移动;
上述主体机构2、转动机构3以及悬挂机构4需要相互配合使用,同时,相互配合使用后的有益效果:通过主体机构2、转动机构3以及悬挂机构4的相互搭配后,能够通过全景摄像头47捕捉并记录不同使用者的面部图像以及身形图像,将实时传输至PLC控制器23进行记录,当使用者无论走到该图纸悬挂设备的哪一个方位,全景摄像头47捕捉到使用者的头像以及身形图像后,通过PLC控制器23对步进电机32发送指令,使步进电机32进行既定角度的转动,步进电机32的转动驱动环形滑轨33的转动,环形滑轨33的转动驱动立板41的转动,从而使图纸始终朝向使用者。
综上,本技术方案中,通过驱动机构1,能够驱动该基于人工智能的建筑工程设计图纸悬挂设备的移动;
本技术方案中,通过主体机构2、转动机构3以及悬挂机构4的相互配合,可以全程的捕捉并记录不同的使用者,无论使用者走到哪一个方位,始终能够使图纸朝向使用者,实现人工智能;
本技术方案中,圆盘39可以具有防尘的作用,避免圆形通槽24因开口过大而导致箱体21内灰尘增多的情况;
本技术方案中,在第一磁石43、第二磁石44、第三磁石45以及第四磁石46吸附式的连接作用下,可以适配不同大小的设计图纸。
实施例2
如图1-图2以及图11和图13所示,本实施例与实施例1的不同之处在于,第一升降机构7和第二升降机构8,第一升降机构7和第二升降机构8分别安装于驱动机构1的顶部两侧,且第一升降机构7和第二升降机构8分别位于主体机构2的两侧,第一升降机构7包括第三安装板71、第一伺服电机74以及第一螺纹杆75,第三安装板71固定于箱体21的一侧外壁下部,第一伺服电机74安装于第三安装板71的底部,且第一伺服电机74的输出轴贯穿于第三安装板71的顶部,第一螺纹杆75的一端与第一伺服电机74的输出轴固定连接,第一螺纹杆75的另一端贯穿于第二导向块29、并与第二安装板210的底部转动连接,第二升降机构8包括第四安装板81、第二伺服电机84以及第二螺纹杆85,第四安装板81固定于箱体21远离第三安装板71一侧外壁的下部,第二伺服电机84安装于第四安装板81的底部,且第二伺服电机84的输出轴贯穿于第四安装板81的顶部,第二螺纹杆85的一端与第二伺服电机84的输出轴固定连接,第二螺纹杆85远离第二伺服电机84的一端贯穿于第一导向块26,并与第一安装板27的底部转动连接,第二升降机构8还包括第三支腿82和第四支腿83,第三支腿82和第四支腿83分别固定于第四安装板81的底部两侧,且第三支腿82和第四支腿83的底部一端均与底座11的顶部固定连接,全景摄像头47的电控输出端通过导线与PLC控制器23的电控输入端电性连接,PLC控制器23的电控输出端通过导线与第一伺服电机74的电控输入端电性连接,全景摄像头47的电控输出端通过导线与PLC控制器23的电控输入端电性连接,PLC控制器23的电控输出端通过导线与第二伺服电机84的电控输入端电性连接。
通过采用上述技术方案,当不同身高的使用者站在该图纸悬挂设备前进行面部识别记录后,全景摄像头47将头像以及身形图像的信号发送至PLC控制器23,PLC控制器23同时向第一伺服电机74和第二伺服电机84发送指令,使第一伺服电机74和第二伺服电机84进行同步的既定角度的转动,在第一伺服电机74和第二伺服电机84的转动分别驱动第一螺纹杆75以及第二螺纹杆85的转动,第一螺纹杆75和第二螺纹杆85的转动分别驱动第二导向块29以及第一导向块26进行上下移动,第一导向块26以及第二导向块29分别在第一导向槽25和第二导向槽28内上下滑动的过程中,驱动支撑板31进行既定高度的上下移动,从而在转动机构3的上下运动作用下,能够使悬挂机构4进行既定高度的升降,以使悬挂机构4的高度始终与使用者身高保持相同。
实施例3
如图11-图14所示,本实施例与实施例2的不同之处在于,第一升降机构7还包括第一压力传感器76以及第一橡胶柱77,第一压力传感器76安装于第三安装板71的顶部,第一橡胶柱77固定于第二导向块29的底部,第一压力传感器76的信号输出端与PLC控制器23的信号输入端信号连接,第二升降机构8还包括第二压力传感器86以及第二橡胶柱87,第二压力传感器86安装于第四安装板81的顶部,第二橡胶柱87固定于第一导向块26的底部,第二压力传感器86的信号输出端与PLC控制器23的信号输出端信号连接。
通过采用上述技术方案,当第二导向块29以及第一导向块26在下移过程中,第二导向块29底部安装的第一橡胶柱77以及第一导向块26底部安装的第二橡胶柱87,通过分别触碰到第一压力传感器76以及第二压力传感器86后,第一压力传感器76和第二压力传感器86感知到压力后,实时的将电信号发送至PLC控制器23,在PLC控制器23的指令作用下,即刻使第一伺服电机74以及第二伺服电机84停止工作。
实施例4
如图1-图2以及图7-图10所示,本实施例与实施例3的不同之处在于,第一照明结构5包括第一空心板51以及第一灯管52,第一空心板51安装于立板41的一侧侧壁,第一灯管52安装于第一空心板51的内腔,第二照明结构6包括第二空心板61以及第二灯管62,第二空心板61安装于立板41远离第一空心板51的一侧侧壁,第二灯管62安装于第二空心板61的内腔,全景摄像头47的顶部还安装有光线传感器48,光线传感器48的信号输出端与PLC控制器23的信号输入端信号连接,PLC控制器23的电控输出端通过导线分别与第一灯管52和第二灯管62的电控输入端电性连接。
通过采用上述技术方案,当工作环境的光线发生变化时,全景摄像头47上安装的光线传感器48进行实时感知,并将电信号发送至全景摄像头47,在全景摄像头47的信号中转作用下,发送至PLC控制器23,使PLC控制器23控制第一灯管52以及第二灯管62的启闭在第一灯管52和56的照明之下,能够便于使用者的使用。
实施例5
如图11和图13所示,本实施例与实施例4的不同之处在于,第一升降机构7还包括第一支腿72以及第二支腿73,第一支腿72和第二支腿73分别固定于第三安装板71的底部两端,且第一支腿72和第二支腿73的底部一端均与底座11的顶部固定连接,第二升降机构8还包括第三支腿82和第四支腿83,第三支腿82和第四支腿83分别固定于第四安装板81的底部两侧,且第三支腿82和第四支腿83的底部一端均与底座11的顶部固定连接。
通过采用上述技术方案,第一支腿72和第二支腿73对第三安装板71进行支撑,第三支腿82和第四支腿83对第四安装板81进行支撑。
为了方便理解本发明的上述技术方案,以下就本发明在实际过程中的工作原理或者操作方式进行详细说明。
在实际应用时,使用者可以从该基于人工智能的建筑工程设计图纸悬挂设备的一侧握持第一手推杆16,或者从另一侧握持第二手推杆17,在第一万向轮12、第二万向轮13、第三万向轮14以及第四万向轮15的滚动作用下,实现设备的移动;将建筑工程设计图纸展平后,分别取下吸附在铁板42上的第一磁石43、第二磁石44、第三磁石45以及第四磁石46,将展平后的图纸平铺于铁板42的表面,将第一磁石43、第二磁石44、第三磁石45以及第四磁石46放置于图纸的四端,通过吸附连接实现对图纸的固定,同时,在第一磁石43、第二磁石44、第三磁石45以及第四磁石46吸附式的连接作用下,可以适配不同大小的设计图纸;使用者站在该基于人工智能的建筑工程设计图纸悬挂设备前,通过全景摄像头47捕捉该使用者的面部图像以及身形图像后,并将图像信号发送至PLC控制器23进行记录,同时,在使用该基于人工智能的建筑工程设计图纸悬挂设备前,通过PLC编程人员对PLC控制器23的程序编程设置后,便可以进行后续使用,以实现人工智能的效果;当使用者无论走到该图纸悬挂设备的哪一个方位,全景摄像头47捕捉到使用者的头像以及身形图像后,通过PLC控制器23对步进电机32发送指令,使步进电机32进行既定角度的转动,步进电机32的转动驱动环形滑轨33的转动,环形滑轨33的转动驱动立板41的转动,从而使图纸始终朝向使用者;同时,立板41的转动驱动第一连杆37和第二连杆38的转动,第一连杆37和第二连杆38的转动分别驱动第一弧形滑块35和第二弧形滑块36在环形滑轨33内滑动,在上述设计的作用下,能够使立板41具有更稳定的支撑力,圆形通槽24便于第一连杆37和第二连杆38的转动,圆盘39可以具有防尘的作用,避免圆形通槽24因开口过大而导致箱体21内灰尘增多的情况;由于使用者的身高不同,当不同身高的使用者站在该图纸悬挂设备前进行面部识别记录后,全景摄像头47将头像以及身形图像的信号发送至PLC控制器23,PLC控制器23同时向第一伺服电机74和第二伺服电机84发送指令,使第一伺服电机74和第二伺服电机84进行同步的既定角度的转动,在第一伺服电机74和第二伺服电机84的转动分别驱动第一螺纹杆75以及第二螺纹杆85的转动,第一螺纹杆75和第二螺纹杆85的转动分别驱动第二导向块29以及第一导向块26进行上下移动,第一导向块26以及第二导向块29分别在第一导向槽25和第二导向槽28内上下滑动的过程中,驱动支撑板31进行既定高度的上下移动,从而在转动机构3的上下运动作用下,能够使悬挂机构4进行既定高度的升降,以使悬挂机构4的高度始终与使用者身高保持相同;与此同时,第三安装板71和第四安装板81还具有限位的作用,当第二导向块29以及第一导向块26在下移过程中,第二导向块29底部安装的第一橡胶柱77以及第一导向块26底部安装的第二橡胶柱87,通过分别触碰到第一压力传感器76以及第二压力传感器86后,第一压力传感器76和第二压力传感器86感知到压力后,实时的将电信号发送至PLC控制器23,在PLC控制器23的指令作用下,即刻使第一伺服电机74以及第二伺服电机84停止工作;当工作环境的光线发生变化时,全景摄像头47上安装的光线传感器48进行实时感知,并将电信号发送至全景摄像头47,在全景摄像头47的信号中转作用下,发送至PLC控制器23,使PLC控制器23控制第一灯管52以及第二灯管62的启闭,在第一灯管52和56的照明之下,能够便于使用者的使用。
通过上面具体实施方式,技术领域的技术人员可容易的实现本发明。但是应当理解,本发明并不限于上述的具体实施方式。在公开的实施方式的基础上,技术领域的技术人员可任意组合不同的技术特征,从而实现不同的技术方案。
- 一种基于人工智能的建筑工程设计图纸悬挂设备
- 一种工程设计用图纸悬挂装置