一种基于磁强计辅助的步态检测方法
文献发布时间:2023-06-19 11:29:13
技术领域
本发明涉及惯性导航技术领域,具体涉及一种基于磁强计辅助的步态检测方法。
背景技术
室内定位技术主要分为两大类:非自主导航技术和自主导航技术。
非自主导航技术包括WiFi、ZigBee等,该技术必须依靠高精度传感器/设备及其与目标对象间的通信链路,在复杂环境下这类导航定位技术无法实现实时精确定位,要实现该类技术需要预先安装好设备,且价格昂贵。
自主导航技术主要指惯性导航技术,它不依赖于任何外部信息,能够实现完全自主导航定位。自主导航技术有行人航迹推算(PDR)技术,源于帮助飞机、潜艇和导弹导航的航位推算技术,通过融合运动传感器估计行人航向、步数和步长来帮助室内行人定位。在PDR系统中,步态检测是保证后续步长位移计算、方向计算的基础,主要是区分支撑相和摆动相,以便利用支撑相内步速为零的特征,适时地进行零速修正。
现有典型的步态检测主要是利用行人在行进过程中惯性测量单元所采集到的数据具有很强的周期规律性,通过不同的方法对每个步态周期内的数据进行处理,如设定阈值来区分支撑相和摆动相,大于该阈值即判为摆动相,小于则视为支撑相。该方法主要是利用行人在行进过程中惯性测量单元所采集到的数据区分支撑相和摆动相,单一惯性传感器检测过程中存在较多干扰量,会影响检测精度。
综上所述,开发一种能对步态进行检测且获得精准数据的步态检测方法具有重要意义。
发明内容
本发明目的在于提供一种基于磁强计辅助的步态检测方法,该方法通过角速度模值和加速度模值得到粗相区域;结合磁场模值,获取粗相区域中含有多个时间点的激变区域以及激变区域内的磁峰值;对该激变区域中各点磁场强度数据进行最小二乘法拟合,得到磁场强度拟合值;结合磁场强度拟合值和磁峰值获取开始点和结束点,最终获得高精准度的脚部姿态(包括支撑相和摆动相)。具体技术方案如下:
一种基于磁强计辅助的步态检测方法,包括以下步骤:
步骤一、安装磁体和传感器,传感器中包含加速度计、陀螺仪和磁强计,磁强计能检测磁性件的磁场信号;行走过程中磁强计与磁体的距离呈周期变化;
步骤二、通过加速度计、陀螺仪和磁强计分别获取时间点t
通过加速度数据、角速度数据和磁场强度数据分别获取时间点t
步骤三、获取脚部姿态,具体是:
步骤3.1、通过步骤二所得加速度模值
步骤3.2、对粗相区域进行辅助判定,包括以下步骤:
步骤3.21、通过步骤二所得磁场模值
步骤3.22、对步骤3.21所得激变区域中各点磁场强度数据M
步骤3.23、进行判断,若偏差值e
步骤3.3、结合步骤3.23所得的起始点和结束点,获得精准的脚部姿态。
优选的,所述步骤3.22中拟合采用最小二乘法进行拟合,具体表达式如下:
其中:
优选的,所述步骤三中:脚部姿态包括支撑相和摆动相;粗相区域包括粗支撑相区域和粗摆动相区域;
若|a
若在时间T内有70%为支撑相点,则判定为粗支撑相区域;若在时间T内有70%为摆动相点,则判定为粗摆动相区域;T取值为0.2-0.4秒。
优选的,所述步骤一中磁体为磁条、磁块及磁链中的一种;传感器为九轴传感器;磁体和传感器分别设置在脚踝处。
优选的,所述步骤二中加速度模值
其中:a
优选的,所述步骤二中获取时间点t
本发明方法操作简单,且能获得高精准度的脚部姿态,实用性强。
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例中角速度模的值示意图;
图2是本发明实施例中加速度模值的示意图;
图3是本发明实施例中磁场模值的示意图;
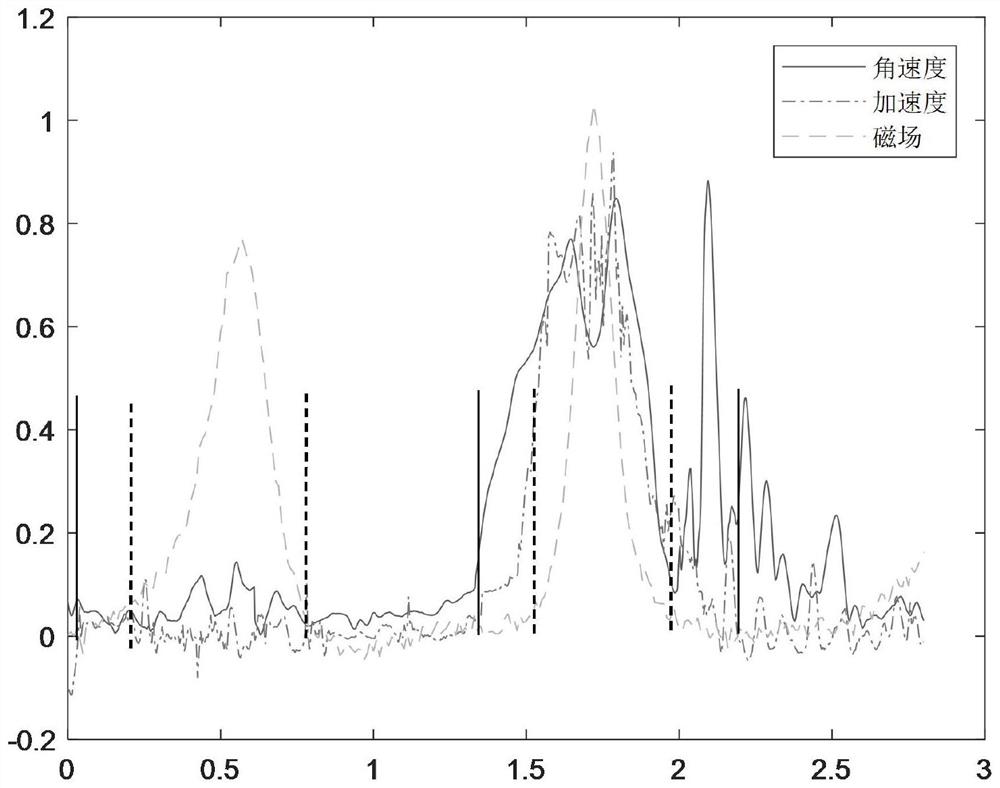
图4为本发明实施例中角速度模、加速度模值和磁场模值最终获得的脚部姿态示意图。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
实施例:
一种基于磁强计辅助的步态检测方法,具体包括如下步骤:
步骤一、安装磁体和传感器,传感器中包含加速度计、陀螺仪和磁强计,磁强计能检测磁性件的磁场信号;此处的磁体为磁条、磁块及磁链中的一种;传感器为九轴传感器;磁体和传感器分别设置在脚踝处,优选磁体设置在左脚踝处,传感器设置在右脚踝处,或者是磁体设置在右脚踝处,传感器设置在左脚踝处;使得行走过程中磁强计与磁体的距离呈周期变化。
步骤二、通过加速度计、陀螺仪和磁强计分别获取时间点t
使用数字滤波器对采集的加速度数据、角速度数据和磁场强度数据进行滤波处理;
通过微波处理后的加速度数据、角速度数据和磁场强度数据分别获取时间点t
其中:a
步骤三、获取脚部姿态(包括支撑相和摆动相),具体是:
(1)、通过步骤二所得加速度模值
粗相区域包括粗支撑相区域和粗摆动相区域;
若|a
若在时间T内有70%为支撑相点,则判定为粗支撑相区域;若在时间T内有70%为摆动相点,则判定为粗摆动相区域;T取值为0.2-0.4秒(优选0.2秒)。
本实施例结合图1-图4可知(图1-图3仅具体示意了摆动相区域,支撑相区域未示意):粗支撑相区域为0.05-1.34;粗摆动相区域为1.34-2.35。粗支撑相区域和粗摆动相区域的获得方法原理相同,以粗摆动相区域为例:首先通过加速度传感器,利用阈值,可以得到粗摆动相为1.47s-2.06s,然后利用角速度传感器得到的粗摆动相为1.34s-2.35s,最后结合角速度模值和加速度模值得到粗摆动相区域为1.34-2.35(s)。
(2)、对粗相区域进行辅助判定,包括以下步骤:
步骤3.21、通过步骤二所得磁场模值
步骤3.22、对步骤3.21所得激变区域中各点磁场强度数据M
采用最小二乘法进行拟合,具体表达式如下:
其中:
步骤3.23、进行判断,若偏差值e
步骤3.3、结合步骤3.23所得的起始点和结束点(所有粗相区域),获得精准的脚部姿态,本实施例中,详见图4:支撑相为0.22-0.77(s);摆动相为1.56-1.91(s);通过磁场模值获得起始点为1.56,结束点为1.91,因此最终获得精确的摆动相区域为1.56-1.91(s)。精确支撑相区域的获得方法原理同摆动相。
应用本实施例的方法,通过角速度模值和加速度模值得到粗相区域(粗支撑相区域和粗摆动相区域);结合磁场模值,获得粗相区域的激变区域及磁峰值;对该激变区域内的磁场强度数据进行最小二乘法拟合得到磁场强度拟合值;结合磁场强度拟合值和磁峰值进行判断并获取起始点和结束点,最终获得高精准度的脚部姿态(此处具体是支撑相和摆动相),实用性强。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于磁强计辅助的步态检测方法
- 一种基于多模态信息融合的步态零速检测方法及系统