一种模块化自动舱门
文献发布时间:2023-06-19 11:30:53
技术领域
本发明涉及机械设备领域,尤其是一种模块化自动舱门,适合用于水域船体舱室迎波面的水密防护。
背景技术
漂浮的水域平台,无论是传统船舶还是智能无人船都容易受波浪影响,均会存在横荡,纵荡,艏摇,横摇,纵摇,垂荡六大自由度晃动,同时船舶运动时反复颠簸对安装在船上舱门设备影响较大,尤其影响整船体水密特性。
传统舱门采用内摆门、平开门或旋转门,需要手动开启或盖合,智能程度低,关合精度低,自调能力差,对迎波面水体阻挡效果差。具体为,传统舱门通过门销挂载安装,密封程度低,容易产生形变,需要定期多次矫正调节,甚至更换,极大影响舱内设备的保养和维护,舱门即使关合也会有大量水雾波浪浸入舱内;尤其是无人船的迎波面,高速运行时船外浪花容易溅入开启状态的舱室,浸泡舱室内设备,难以自动排放已浸入船内的水体。
鉴于此,克服上述现有技术所存在的缺陷是本技术领域亟待解决的问题。
发明内容
本发明需要解决的技术问题是:水域船体平台的传统舱门难以自动密封盖合,导致海水倒灌或水雾进入舱内,尤其是迎波面舱室在舱门开启后会持续浸水的问题。
本发明通过如下技术方案达到上述目的:一种模块化自动舱门,包括舱盖模块、舱架模块和连动模块;所述舱架模块可安装于船体舱室的入口处,所述舱盖模块可通过连动模块连接在舱架模块上,当连动模块动作时带动舱盖模块动作实现舱门的自动开启或关合。
进一步的,所述舱盖模块包括上盖板、下盖板、围边板和铰接座;所述上盖板和下盖板之间四周部位焊接围边板,形成密封长方体,其中上盖板和下盖板尺寸相同;所述下盖板的底面两端各设置两个铰接座,其中靠内侧的为第一铰接座,靠外侧的为第二铰接座,第一铰接座与第二铰接座型号相同且平行对应设置。
所述舱架模块包括门框和固定台;所述门框的外边框尺寸与下盖板的边框尺寸相同,便于舱盖模块配套的盖合在门框上;所述固定台设置在门框两端,门框可通过固定台固定在船体舱室的入口处,具体为,先将门框放置指定位置,再通过螺栓将固定台连接在船体上。
所述连动模块包括主动臂、从动臂、主定座、从定座、液压缸、同步阀、液压管、限位开关、角度传感器和处理器;所述舱架模块底部两端各设置一组主定座和从定座,每个主定座上设置一个液压缸,共两个液压缸,所述主动臂的一端连接在液压缸的输出轴上,另一端连接在第一铰接座上,所述从动臂的一端连接在从定座上,另一端连接在第二铰接座上;具体的,所述主定座与从定座之间的间距与第一铰链座和第二铰链座之间的间距相同;主动臂和从定臂的动作长度相同,主动臂和从动臂间形成平行四边形联动体。
所述同步阀安装于门框一侧门梁的下端中间部位,所述液压管包括入口管和出口管,其中入口管设置于同步阀的入口,出口管一端与同步阀出口相连,另一端与液压缸的入口相连;具体的,所述入口管将高压油引入同步阀,同步阀将高压油经由出口管均衡送给两侧液压缸,实现两侧液压缸同步且同强度的动作。
所述限位开关安装于门框内侧与主动臂位置对应,可监测主动臂是否到达所允许的极限位置;所述角度传感器吊装在门框的门梁下,其监测端与液压缸的输出轴相连,可监测液压缸的旋转角度。
所述处理器与同步阀、限位开关和角度传感器相连,监控同步阀、限位开关和角度传感器的工况信息,具体的,处理器根据第三方指令控制同步阀动作实现液压缸按指定角度、方向和速度旋转;当主动臂压到限位开关时反馈信息给处理器,处理器关合同步阀,液压缸自保持;角度传感器监测液压缸输出轴的旋转工况,并将监测数据传送给处理器。
进一步的,所述舱盖模块还包括加强筋,所述加强筋焊接于上盖板和下盖板之间,形成内部加强型舱盖模块,可避免舱盖模块被压扁或变形。
进一步的,所述加强筋的结构为米字型,可高效增大支撑面积。
进一步的,所述舱架模块还包括密封带和水密条;所述密封带设置于门框和固定台底端外侧,便于舱架模块嵌入船体舱室的入口处时进行外密封,防止水体从舱架模块边缘进入船体的舱室;所述水密条设置在门框门梁的顶面,所述下盖板设置有对应的容纳槽,当舱盖模块盖合在门框上时,水密条插入容纳槽实现接触面密封,可有效阻隔水雾进入船体舱室。
进一步的,所述舱盖模块还包括排水模块;所述排水模块包括水泵、排水管和浮子开关;所述水泵安装于固定台一侧,排水管配套的设置在水泵上;所述排水管的进水端垂直向下接触船体舱室的底部集水点,排水管的出水端穿过固定台并伸出船体之外,可将船体舱室底部的积水排出船体,可及时解决舱盖模块打开时水体灌入舱室后的积水问题。
进一步的,所述舱盖模块、门框、固定台、主动臂、从动臂、主定座、从定座和加强筋均采用铝合金材料制成。
进一步的,所述密封带和水密条采用橡胶材质制成。
进一步的,所述处理器通过CAN口或COM口接收第三方控制指令。
进一步的,在所述同步阀的出口设置与处理器相连的电磁阀,并设置多个与处理器相连的压力传感器,将所述压力传感器均匀分布安装于容纳槽内,监测水密条对舱盖模块上容纳槽的密封压力,当水密条对舱盖模块上单端容纳槽的密封压力低于指定阈值时定义为异常端,打开异常端电磁阀关闭正常端电磁阀,从而驱动异常端液压缸动作,将水密条对容纳槽密封压力恢复至正常水平。
本发明相比现有技术具有以下优点。
1、通过设置摆动缸实现舱盖模块自动开启或盖合,开合位置可精准控制,使舱盖模块保持对门框的盖合密封强度。
2、通过设置电磁阀和压力传感器,监测水密条对舱盖模块上容纳槽的密封压力,当水密条对舱盖模块上单端容纳槽的密封压力低于指定阈值时,打开异常端电磁阀关闭正常端电磁阀,从而驱动异常端液压缸动作,自动将水密条对容纳槽密封压力恢复至正常水平。
3、通过设置水密条实现门框的密封,当舱门关合时,能有效隔离海水溅入或水雾侵入舱室。
4、通过在舱盖模块中间设置加强筋提升机械强度。
5、当舱盖模块打开后水体容易从迎波面灌入舱室,通过设置排水模块及时排除舱室积水。
6、通过设置同步阀控制两个侧液压缸同步协调动作,配合主动臂和从动臂形成平行四连杆机构,确保舱门在运动过程中受力均匀,减少变形,提高舱门的使用寿命。
7、采用舱门与船体分离式的模块化设计方式,确保船体在焊接过程中,不会对舱门造成影响,规避焊接变形风险,便于调试、安装和维护。
附图说明
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例中所需要使用的附图作简单地介绍。显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
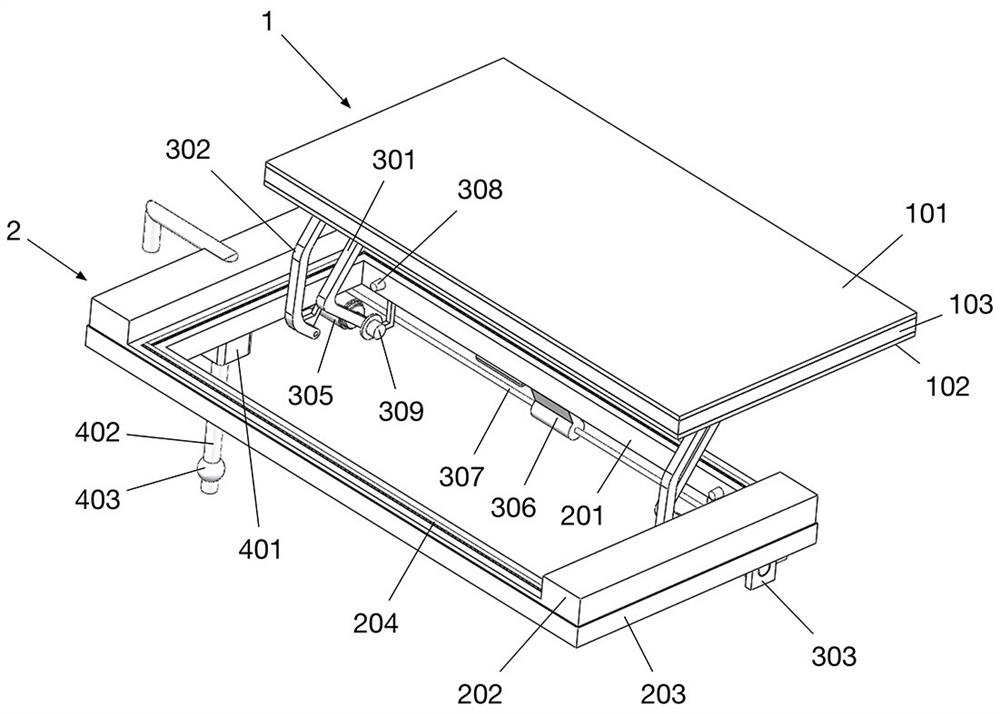
图1为本发明实施例中舱盖模块开启状态俯视立体图。
图2为本发明实施例中模块组成部分设备结构图。
图3为本发明实施例中舱盖模块开启状态仰视立体图。
图4为本发明实施例中舱盖模块仰视立体图。
图5为本发明实施例中舱盖模块爆炸视图。
图6为本发明实施例中舱盖模块关合状态俯视立体图。
图7为本发明实施例中舱架模块俯视爆炸视图。
图8为本发明实施例中同步阀和液压管立体图。
图9为本发明实施例中同步阀和液压管立体图。
图中:1-舱盖模块;2-舱架模块;3-连动模块;4-排水模块;101-上盖板;102-下盖板;103-围边板;104-铰接座;105-加强筋;106-容纳槽;201-门框;202-固定台;203-密封带;204-水密条;301-主动臂;302-从动臂;303-主定座;304-从定座;305-液压缸;306-同步阀;307-液压管;308-限位开关;309-角度传感器;310-处理器;311-入口管;312-出口管;401-水泵;402-排水管;403-浮子开关。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
在本发明的描述中,术语“内”、“外”、“纵向”、“横向”、“上”、“下”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明而不是要求本发明必须以特定的方位构造和操作,因此不应当理解为对本发明的限制。
此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。下面就参考附图和实施例结合来详细说明本发明。
如图1-9所示,一种模块化自动舱门,包括舱盖模块1、舱架模块2和连动模块3;所述舱架模块2安装于船体舱室的入口处,所述舱盖模块1通过连动模块3连接在舱架模块2上,当连动模块3动作时带动舱盖模块1动作实现舱门的自动开启或关合。
本实施例中,所述舱盖模块1包括上盖板101、下盖板102、围边板103和铰接座104;所述上盖板101和下盖板102之间四周部位焊接围边板103,形成密封长方体,其中上盖板101和下盖板102尺寸相同,长110cm、宽60cm、厚1cm,围边板103的外围尺寸长110cm、宽60cm、厚3cm;所述下盖板102的底面两端各设置两个铰接座104,其中靠内侧的为第一铰接座104,靠外侧的为第二铰接座104,第一铰接座104与第二铰接座104型号相同且平行对应设置。
所述舱架模块2包括门框201和固定台202;所述门框201的外边框尺寸与下盖板102的边框尺寸相同,长110cm、宽60cm,便于舱盖模块1配套的盖合在门框201上;所述固定台202设置在门框201两端,门框201可通过固定台202固定在船体舱室的入口处,固定台202长度60cm、宽度10cm、厚度10cm,当舱盖模块1完全盖合在门框201上时,上盖板101的顶面与固定台202的顶面平齐;具体为,先将门框201放置指定位置,再通过六个螺栓将固定台202连接在船体上。
所述连动模块3包括主动臂301、从动臂302、主定座303、从定座304、液压缸305、同步阀306、液压管307、限位开关308、角度传感器309和处理器310。
所述舱架模块2底部两端各设置一组主定座303和从定座304,每个主定座303上设置一个DES140-99液压缸305,共两个可旋转的液压缸305,所述主动臂301的一端连接在液压缸305的输出轴上,另一端连接在第一铰接座104上,所述从动臂302的一端连接在从定座304上,另一端连接在第二铰接座104上;具体的,所述主定座303与从定座304之间的间距为10cm,第一铰链座和第二铰链座之间的间距为10cm;主动臂301和从定臂的动作长度相同,均为30cm,主动臂301和从动臂302间形成平行四边形联动体。
所述同步阀306安装于门框201一侧门梁的下端中间部位,所述液压管307包括入口管311和出口管312,其中入口管311设置于同步阀306的入口,出口管312一端与同步阀306出口相连,另一端与液压缸305的入口相连;具体的,所述入口管311将船体中油泵输出的高压油引入同步阀306,同步阀306将高压油经由出口管312均衡送给两侧液压缸305,实现两侧液压缸305同步且同强度的动作,确保液压缸305平稳且平行移动舱盖模块1,其中液压缸305内径1cm。
所述限位开关308安装于门框201内侧与主动臂301位置对应,可监测主动臂301是否到达所允许的极限位置;所述角度传感器309为DWQT型±10V电压输出角度传感器309,吊装在门框201的门梁下,其监测端与液压缸305的输出轴相连,可监测液压缸305的旋转角度。
所述处理器310为以SIM32F系列CPU处理器310为核心组成控制盒,与同步阀306、限位开关308和角度传感器309相连,监控同步阀306、限位开关308和角度传感器309的工况信息,具体的,处理器310根据第三方指令控制同步阀306动作实现液压缸305按指定角度、方向和速度旋转;当主动臂301将舱盖模块1平移55cm,舱盖模块1水平方向上完全移至门框201一侧时,主动臂301碰触到限位开关308,限位开关308反馈受压信息给处理器310,处理器310关合同步阀306,液压缸305自保持,舱盖模块1停止进一步平移;所述角度传感器309监测液压缸305输出轴的旋转工况,并将监测数据传送给处理器310,便于确定舱门模块开启或关合的实时状态。
本实施例中,所述舱盖模块1还包括米字型加强筋105,所述加强筋105焊接于上盖板101和下盖板102之间,形成内部加强型舱盖模块1,可避免舱盖模块1被压扁或变形,尤其采用米字型加强筋105可高效增大支撑面积。
本实施例中,所述舱架模块2还包括密封带203和水密条204,采用橡胶材质制成;所述密封带203高4cm、厚3mm,设置于门框201和固定台202底端外侧,便于舱架模块2嵌入船体舱室的入口处时进行外密封,防止水体从舱架模块2边缘进入船体的舱室;所述水密条204包括梯形底部和弧形顶部,其中梯形底部嵌入门框201门梁的顶面,弧型顶部向上突出6mm;所述下盖板102设置有对应的容纳槽106,容纳槽106深度为4mm小于弧形顶部的突出高度,当舱盖模块1盖合在门框201上时可向下挤压水密条2042mm,确保水密条204插入容纳槽106后,所有接触面均实现密封,可有效阻隔水雾进入船体舱室。
本实施例中,所述舱盖模块1还包括排水模块4;所述排水模块4包括水泵401、排水管402和浮子开关403;所述水泵401安装于固定台202一侧,排水管402配套的设置在水泵401上;所述排水管402的进水端垂直向下接触船体舱室的底部集水点,排水管402的出水端穿过固定台202并伸出船体之外,可将船体舱室底部的积水排出船体,可及时解决舱盖模块1打开时水体灌入舱室后的积水问题。
本实施例中,所述舱盖模块1、门框201、固定台202、主动臂301、从动臂302、主定座303、从定座304和加强筋105均采用铝合金材料制成。
本实施例中,所述处理器310通过CAN口或COM口接收第三方控制指令。
本实施例中,在所述同步阀306的出口设置与处理器310相连的电磁阀,并设置4个与处理器310相连的压力传感器,将所述压力传感器安装于容纳槽106内顶点,监测水密条204对舱盖模块1上容纳槽106的密封压力,当水密条204对舱盖模块1上单端容纳槽106的密封压力低于指定阈值200牛顿时定义为异常端,启动异常端电磁阀关闭正常端电磁阀,从而驱动异常端液压缸305动作,使水密条204对容纳槽106的密封压力恢复至正常水平,其中正常水平为200牛顿至1000牛顿,具体的,当舱盖模块1一端密封压力异常时,只驱动对应端液压缸305动作,当一侧密封压力异常时,同时驱动两端液压缸305动作,维持整个水密条204对容纳槽106正常的密封压力。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种模块化自动舱门
- 一种排风舱门自动开启与关闭的装置、舱门开关装置