自移动园艺设备
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种打草机构及移动设备。
背景技术
现有的割草机主要应用在园林装饰修剪、草地绿化修剪、城市街道、绿化景点、田园修剪、田地除草,特别是公园内的草地和草原、足球场等其他用草场地、私人别墅花园、以及农林畜牧场地植被等方面的修整,还可用在秋收之时。
割草机的割草盘一般设于割草机的底盘上,使割草机底盘完全覆盖割草盘,对草坪进行修整时,其割草的范围为割草机的宽度。为了保证割草机在草坪边缘可以切割,在割草机一侧边缘布置一个打草装置。但是现有的打草装置在遇到障碍物时,无法顺利越过障碍物进行切割。此外为提高操作安全,有必要将不工作的打草装置收回进割草机,而需要工作时,将打草装置突伸出割草机。为此,非常有必要设计出一种能够由用户通过操作来控制状态,以及遇障碍物时能够规避障碍物且同时可将障碍物边缘的草完全切割的自移动园艺设备。
发明内容
本发明的目的在于提供一种能够由用户通过操作来控制状态的自移动园艺设备。
为达到上述目的,本发明提供如下技术方案:一种自移动园艺设备,在工作区域内移动和工作,包括:
机身;
安装于所述机身的行走模块;
安装于所述机身的打草机构,所述打草机构包括传输动力的转动轴以及安装在所述转动轴上的切割装置;
用于控制所述行走模块和所述打草机构的控制模块;
所述自移动园艺设备还包括设置在所述机身上且驱动所述打草机构的伸缩机构,所述机身上设置有一凹槽和可插入至所述凹槽内的致动件,所述致动件插入至所述凹槽内时,驱动所述伸缩机构变形或移动,致使所述伸缩机构驱动所述打草机构向机身内移动;所述致动件被拔出所述凹槽后,所述伸缩机构驱动所述打草机构向机身外移动。
进一步地,所述致动件插入至所述凹槽内时,所述伸缩机构驱动所述打草机构回收到所述机身内,所述致动件被拔出所述凹槽后,所述伸缩机构驱动所述打草机构突伸出所述机身。
进一步地,所述致动件为用以控制所述自移动园艺设备的遥控器。
进一步地,所述伸缩机构包括弹性件。
进一步地,所述伸缩机构还包括第一杆体和第二杆体,所述第一杆体的一端与所述打草机构活动连接,另一端与所述机身活动连接,所述第二杆体的一端与所述打草机构活动连接,另一端与所述机身活动连接,所述弹性件的两端分别与所述第一杆体、第二杆体连接。
进一步地,所述第一杆体的一端与所述打草机构销连接,另一端与机身销连接,所述第二杆体的一端与所述打草机构销连接,另一端与机身销连接,所述第一杆体包括销连接的第一段和第二段,所述第二杆体包括销连接的第三段和第四段。
进一步地,所述伸缩机构还包括第一杆体和第二杆体,所述第一杆体一端与所述机身销连接,所述第二杆体具有第一端和第二端,所述第一端销连接固定在所述机身上,所述第二端与所述第一杆体滑动连接,所述第二端与所述打草机构连接,所述弹簧的一端与所述第一杆体或第二杆体销连接,另一端与所述机身连接。
进一步地,所述第一杆体上开设有滑槽,所述滑槽沿所述第一杆体的纵长方向延伸,所述第二杆体的所述第二端上设置有滑块,所述滑块设置在所述滑槽内并在所述滑槽内滑动。
进一步地,所述第一杆体上形成有伸入至所述凹槽内的第一卡持部,所述第二杆体上形成有伸入至所述凹槽内的第二卡持部,所述致动件插入至所述凹槽内时与所述第一卡持部和第二卡持部形成干涉。
进一步地,所述第一卡持部形成在所述第一杆体与所述机身连接的一端,所述第二卡持部形成在所述第二杆体与所述机身连接的一端。
进一步地,所述切割装置包括打草绳或者切割刀片。
进一步地,所述自移动园艺设备还包括安装在所述机身上且用以传递动力的主动轮、与所述转动轴同轴设置的从动轮及张紧在所述主动轮和从动轮之间的传动带。
进一步地,所述自移动园艺设备还包括有用以驱动所述转动轴转动的切割马达。
本发明还提供了一种自移动园艺工作系统,所述自移动园艺工作系统包括所述自移动园艺设备,所述自移动园艺设备包括供用户操作产生控制信号的遥控器,所述遥控器包括伸缩控制单元,所述伸缩控制单元控制所述打草机构向机身内移动或向机身外移动。
本发明的目的还在于提供一种遇障碍物时能够规避障碍物且同时可将障碍物边缘的草完全切割的自移动园艺设备。
为了实现上述目的,本发明所采用的技术方案如下:一种自移动园艺设备,包括
机身;
安装于所述机身的行走模块;
安装于所述机身的打草机构,所述打草机构包括传输动力的转动轴以及安装在所述转动轴上的切割装置;
用于控制所述行走模块和所述打草机构的控制模块;
所述自移动园艺设备还包括安装在所述机身且位于所述切割装置外侧的防护机构以及安装在所述机身且驱动所述打草机构保持在第一位置的伸缩机构,所述防护机构被施加压力后驱动所述打草机构移动且致使所述伸缩机构发生变形,所述防护机构上的压力撤销后所述伸缩机构驱动所述打草机构恢复到所述第一位置。
进一步地,所述防护机构围设在所述切割装置外侧,所述防护机构包括至少部分的圆形或类圆形壳体。
进一步地,所述壳体由铁丝围设形成。
进一步地,所述伸缩机构包括弹性件和/或活动杆体
进一步地,所述伸缩机构还包括第一杆体和第二杆体,所述第一杆体与所述第二杆体活动连接,所述切割装置固定于所述第一杆体。
进一步地,所述防护机构包括固定在所述第一杆体上的第一防护杆和固定在所述第二杆体上的第二防护杆,所述第一防护杆、第二防护杆相对设置在所述切割装置的两侧。
进一步地,所述第一防护杆未与第一杆体连接的一端、所述第二防护杆未与第二杆体连接的一端均朝向被切割装置。
进一步地,所述机身上设置有一凹槽和可插入至所述凹槽内的致动件,所述致动件插入至所述凹槽内时,驱动所述伸缩机构变形或移动,致使所述伸缩机构驱动所述打草机构向机身内移动;所述致动件被拔出所述凹槽后,所述伸缩机构驱动所述打草机构向机身外移动。
进一步地,所述致动件插入至所述凹槽内时,所述伸缩机构驱动所述打草机构回收到所述机身内,所述致动件被拔出所述凹槽后,所述伸缩机构驱动所述打草机构突伸出所述机身。
进一步地,所述致动件为用以电控所述自移动园艺设备的遥控器。
进一步地,所述切割装置包括打草绳或者切割刀片。
进一步地,所述自移动园艺设备还包括安装在所述机身上且用以传递动力的主动轮、与所述转动轴同轴设置的从动轮及张紧在所述主动轮和从动轮之间的传动带。
进一步地,所述自移动园艺设备还包括有用以驱动所述转动轴转动的切割马达。
本发明还提供了一种自移动园艺工作系统,所述自移动园艺工作系统包括所述自移动园艺设备,所述自移动园艺设备包括供用户操作产生控制信号的遥控器,所述遥控器包括伸缩控制单元,所述伸缩控制单元控制所述打草机构向机身内移动或向机身外移动。
本发明的有益效果在于:
通过致动件插入至凹槽内,驱动伸缩机构变形或移动,致使伸缩机构带动打草机构向机身内移动;致动件被拔出所述凹槽后,伸缩机构驱动打草机构向机身外移动,由用户通过操作致动件的插入或拔出来控制打草机构的的状态,提高设备的安全性能;
在工作状态下,当打草机构外围设置的防护机构遇到障碍物时,通过防护机构与伸缩机构的配合驱动打草机构向内收回,轻松越过障碍物,且同时可将障碍物边缘的草完全切割。该装置操作简单、省力、割草效果更佳、充分满足用户的需求。
上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
图1为本发明一实施例所示的自移动园艺设备的结构示意图,打草机构处于工作状态;
图2为图1所示的自移动园艺设备在另一状态时的结构示意图,打草机构处于收回状态;
图3为图1中打草机构处于收回状态时的剖视图;
图4为图1中打草机构处于工作状态时的剖视图;
图5为图3所示的打草机构处于收回状态时的简示图;
图6为图4所示的打草机构处于工作状态时的简示图;
图7为图6中的部分结构的示意图;
图8为图7中的部分结构的示意图;
图9为第二种结构的打草机构的简示图,打草机构处于收回状态;
图10为第二种结构的打草机构处于工作状态时的简示图;
图11为第三种结构的打草机构的简示图,打草机构处于工作状态;
图12为第三种结构的打草机构处于收回状态时的简示图。
具体实施方式
下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的机构或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
请参见图1至图2,本发明所示的在工作区域内移动和工作的自移动园艺设备,自移动园艺设备包括割草机、智能设备、行走装置等,本发明以具有割草设备的自移动园艺设备为例进行详细介绍。自移动园艺设备包括机身11、安装于所述机身的行走模块300、用于控制所述行走模块300和打草机构12的控制模块(未图示)、。以及安装在机身11侧面底部且被用于切割边缘草坪400的打草机构12。
请参见图3至图6,自移动园艺设备1还包括设置在打草机构12外侧的防护机构13以及设置在机身11上且驱动打草机构12保持在第一位置的伸缩机构14。机身11上设置有一凹槽111和可插入至凹槽111内的致动件112,致动件112为用以控制自移动园艺设备1的遥控器。致动件112插入至凹槽111内时,驱动所述伸缩机构14变形或移动,致使所述伸缩机构14带动所述打草机构12向机身内移动;所述致动件112被拔出所述凹槽111后,所述伸缩机构14驱动所述打草机构12向机身外移动。具体的,所述致动件112插入至所述凹槽111内时,所述伸缩机构14驱动所述打草机构12回收到所述机身11内,所述致动件112被拔出所述凹槽111后,所述伸缩机构14驱动所述打草机构12突伸出所述机身11,此状态为打草机构12的工作状态。
打草机构12在工作状态时,防护机构13被施加压力后驱动打草机构12移动且使伸缩机构14发生变形,防护机构13上的压力撤销后伸缩机构14驱动打草机构12恢复到第一位置。该第一位置被定义为切割装置能展开的最远的位置,如图6所示的打草机构12远离机身11的位置。
打草机构12包括传输动力的转动轴151和安装在转动轴151上且由转动轴151带动旋转的切割装置122。切割装置122包括固定安装在转动轴151上的旋转架1221以及安装在旋转架1221上的切割工具1222。切割工具1222可以为打草绳或者切割刀片。本实施例中,防护机构13围设在所述切割装置122外侧,防护机构13包括至少部分圆形或类圆形壳体。具体的,该防护机构13为由铁丝围设形成的类圆形壳体。
切割装置122上方设置有切割马达15,切割马达15的电机轴151竖直向下设置,电机轴151穿过防护机构13插入到旋转架1221的中心与旋转架1221固定连接。本实施例中,切割工具1222由电机轴151直接连接并带动其转动,故该电机轴151即为转动轴151。
打草机构12的上方设置有安装架16,切割马达15固定在安装架16内,防护机构13固定在安装架16的下端,打草机构12与安装架16由电机轴151连接,使打草机构12只相对安装架16发生旋转运动。安装架16使切割马达15、防护机构13以及打草机构12模块化并同步移动。
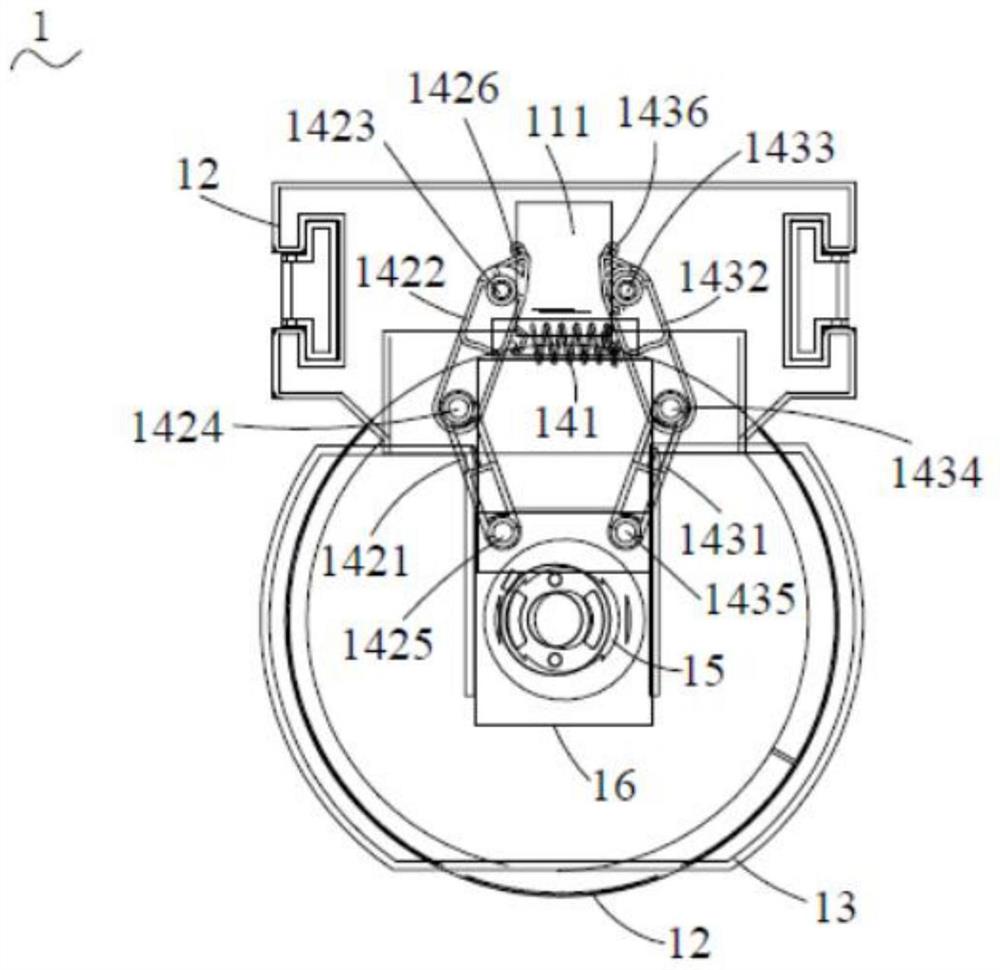
伸缩机构14包括弹性件141、第一杆体142和第二杆体143。第一杆体142的一端与防护机构13或打草机构12活动连接,另一端与机身11活动连接,第二杆体143的一端与防护机构13或打草机构12活动连接,另一端与机身11活动连接,弹性件141的两端分别与第一杆体142、第二杆体143连接。本实施例中,该第一杆体142、第二杆体143均采用与打草机构12连接,以便于整体安装。值得注意的是,在本实施例中,与打草机构12连接即为与安装架16连接。具体的,弹性件141为弹簧141,第一杆体142包括采用第二销1424连接的第一段1421和第二段1422,第二杆体143包括采用第五销1434连接的第三段1431和第四段1432。第一段1421、第二段1422、第三段1431以及第四段1432组成的结构为类铰链四杆结构。第一段1421远离第二段1422的一端与打草机构12用第三销1425连接,第二段1422远离第一段1421的一端与机身11用第一销1423连接,第三段1431远离第四段1432的一端与打草机构12用第六销1435连接,第四段1432远离第三段1431的一端与机身11用第四销1433连接。弹簧141的两端分别与第二段1422、第四段1432连接。
在其他实施例中,伸缩机构、防护机构以及机身的连接方式还可以为:第一杆体的一端与防护机构滑动连接,另一端与机身铰连接和第二杆体的一端与防护机构滑动连接,另一端与机身铰连接;或者第一杆体的一端防护机构铰连接,另一端与机身滑动连接和第二杆体的一端与防护机构铰连接,另一端与机身滑动连接;或者第一杆体的两端与防护机构以及机身都为滑动连接,第二杆体的两端与防护机构以及机身都为滑动连接。
自移动园艺设备1在工作状态时,防护机构13沿障碍物施加在防护机构13的压力的方向移动,带动伸缩机构14变形,避开障碍物,防护机构13越过障碍物后,伸缩机构14恢复原状,驱动打草机构12恢复到第一位置。详细的,当防护机构13未遇到障碍物时,伸缩机构14驱动打草机构12保持在第一位置。当防护机构13遇到障碍物,障碍物施加压力在防护机构13上,防护机构13发生移动,带动打草机构12和安装架16同步移动,并且伸缩机构14发生变形。具体的,请参见图7,防护机构13在A处遇到障碍物,被施加沿a方向的力,防护机构13向a方向移动,第三销1425和第六销1435向a方向移动,也就是打草机构12向a方向移动。此时,第二段1422以第一销1423为定点,向b方向转动,第二销1424以第一销1423为定点,向b方向转动。第四段1432以第四销1433为定点,向c方向转动,第五销1434以第四销1433为定点,向c方向转动。此时弹簧被拉伸,打草机构12向机身11内移动,避开障碍物。防护机构13越过障碍物后,请参见图8,防护机构13被施加沿a方向的力消失,处于拉伸状态下的弹簧恢复原状,带动第二段1422以第一销1423为定点,向d方向转动,第二销1424以第一销1423为定点,向d方向转动。第四段1432以第四销1433定点,向e方向转动,第五销1434以第四销1433为定点,向e方向转动。第二销1424带动第三销1425向f方向移动,第五销1434带动第六销1435向f方向移动,打草机构12向f方向移动至第一位置。防护机构13可在任何位置处遇到障碍物。
请参见图5和图6,第一杆体142上形成有伸入至凹槽111内的第一卡持部1426,第二杆体143上形成有伸入至凹槽111内的第二卡持部1436,致动件112插入至凹槽111内时与第一卡持部1426和第二卡持部1436形成干涉。第一卡持部1426形成在第一杆体142与机身11连接的一端,第二卡持部1436形成在第二杆体143与机身11连接的一端。
具体的,第一卡持部1426形成在第二段1422与机身11连接的一端,第一卡持部1426和第二段1422以第一销1423为定点做反向转动;第二卡持部1436形成在第四段1432与机身11连接的一端,第二卡持部1436和第四段1432以第四销1433为定点做反向转动。致动件112插入至凹槽111内前,打草机构12处在第一位置,致动件112插入至凹槽111内时请参见图7,致动件112与第一卡持部1426和第二卡持部1436形成干涉,第一卡持部1426以第一销1423为定点向g方向转动,第二段1422以第一销1423为定点向b方向转动;第二卡持部1436以第四销1433为定点向h方向转动,第四段1432以第四销1433为定点向c方向转动,伸缩机构14的变形与防护机构13在A处遇障碍物时伸缩机构14的变形相同,在此不再赘述。伸缩机构14的变形带动打草机构12向a方向移动。致动件112完全插入至凹槽111内后,打草机构12收回到机身11内,如图3和图5所示打草机构12的收回状态。打草机构12不工作时,将打草机构12收回进机身11内,保证了安全性能。将致动件112拔出凹槽111时请参见图8,第一卡持部1426以第一销1423为定点向i方向转动,第二段1422以第一销1423为定点向d方向转动;第二卡持部1436以第四销1433为定点向j方向转动,第四段1432以第四销1433为定点向e方向转动,伸缩机构14的变形与防护机构13越过障碍物后伸缩机构14的变形相同,在此不再赘述。伸缩机构14的变形带动打草机构12向f方向移动。将致动件112完全拔出凹槽111后,打草机构12向f方向移动突伸出机身11,如图4和图6所示的打草机构12的工作状态。
通过设置凹槽111和可插入至凹槽111内的致动件112,并使致动件112与第一杆体142的第一卡持部1426、第二杆体143的第二卡持部1436配合实现控制打草机构12的的状态,从而在不需要打草机构12工作时,其可收回至进割草机内,提高了操作安全。
自移动园艺设备除上述结构(第一种结构的自移动园艺设备1)外,还可以做下述的变化。
请参见图9和图10,第二种结构的自移动园艺设备2与第一种结构的自移动园艺设备1的区别在于:伸缩机构和防护机构。
第二种结构的伸缩机构24包括弹性件241、第一杆体242和第二杆体243。第一杆体242一端与机身21用第一销2421连接,第二杆体243具有第一端2432和第二端2433,第二杆体243的第一端2432用第二销2431销连接固定在机身21上,第二杆体243的第二端2433与第一杆体242滑动连接,第一杆体242和第二杆体243形成的结构为类曲柄滑块机构。具体的,第一杆体242上开设有滑槽2422,滑槽2422沿第一杆体242的纵长方向延伸,第二杆体243的第二端2433上固定设置有滑块2434,滑块2434设置在滑槽2422内并在滑槽2422内滑动。滑块2434在滑槽2422内滑动,带动第一杆体242以第一销2421为定点转动,带动第二杆体243以第二销2431为定点转动,滑块2434的滑动以第二销2431为定点转动。诚然,在其他实施例中,第二杆体的第二端上固定设置有套管,套管套设在第一杆体上并且套管沿第一杆体的纵长方向可往复滑动,带动第二杆体以第二销为定点转动同时带动第一杆体以第一销为定点转动。
第二杆体243的第二端2433还与打草机构22连接,具体的,打草机构22可与滑块2434固定连接。
本实施例中,弹性件241的一端与第一杆体242或第二杆体243连接,另一端与机身21连接,具体的,弹性件241为弹簧241,弹簧241一端与滑块2434固定连接,另一端与机身21连接。在其他实施例中,弹性件也可一端固定在第一杆体上,另一端固定在第二杆体上。
防护机构23包括固定形成在第一杆体242上的第一防护杆231和固定形成在第二杆体243上的第二防护杆232,第一防护杆231与第一杆体242之间形成的夹角固定不变,第二防护杆232与第二杆体243之间形成的夹角固定不变。本实施例中,该第一杆体242和第一防护杆231一体成型,第二杆体243和第二防护杆232一体成型。
第一防护杆231、第二防护杆232相对设置在切割装置222的两侧,第一防护杆231未与第一杆体242连接的一端、第二防护杆232未与第二杆体243连接的一端均朝向被切割装置222,该第一防护杆231未与第一杆体242连接的一端、第二防护杆232未与第二杆体243连接的一端分别均朝切割装置222方向弯折以形成第一弯曲部2311、第二弯曲部2321。该第一弯曲部2311、第二弯曲部2321分别设置有第一滑轮2312和第二滑轮2322。
该第二种结构的自移动园艺设备2也可在机身21上设置与第一实施例相同凹槽211和可插入至凹槽211内的致动件212,对应的,在第一杆体242上形成有伸入至凹槽211内的第一卡持部(未图示),第二杆体243上形成有伸入至凹槽211内的第二卡持部(未图示),致动件212插入至凹槽211内时与第一卡持部和第二卡持部形成干涉致使伸缩机构24带动打草机构23收回到机身21内部;致动件212被拔出凹槽211后,伸缩机构24驱动打草机构22突伸出机身21。
该第二种结构的自移动园艺设备2在工作状态下,如图10所示,防护机构23在B处触碰到障碍物,被施加沿k方向的力,第一防护杆231以第一销2421为定点向k方向转动,带动第一杆体242以第一销2421为定点向k方向转动,带动第二杆体243以第二销2431为定点向l方向转动,同时打草机构22与滑块2434同步转动。此时弹簧241压缩,打草机构22由第一位置向机身21收回,避开障碍物。防护机构23越过障碍物后,如图9所示,第一防护杆231被施加沿k方向的力消失,处于压缩状态下的弹簧241恢复原状,带动滑块2434和打草机构22以第二销2431为定点向m方向转动,第一杆体242和第一防护杆231以第一销2421为定点向n方向转动,直到打草机构22恢复到第一位置。第一防护杆231和第二防护杆232的任何位置都可以遇到障碍物。
请参见图11和图12,第三种结构的自移动园艺设备3与第一种结构的自移动园艺设备1的区别在于:与打草机构与切割马达之间增设了传动装置及不同结构的伸缩机构。
切割马达35安装在机身31上,切割马达35的电机轴(未图示)竖直向下设置,用以传递动力的主动轮352同轴固定在电机轴上,所转动轴(未图示)同轴设置有从动轮353,在主动轮352和从动轮353之间设置有张紧的传动带354。主动轮352、从动轮353及传动带354形成传动装置,将切割马达35的动力传输至切割装置(未图示),使其转动进行割草工作。在传动装置的外围设置有防护壳355。在其他实施例中传动装置还可以为其他结构,如齿轮传动装置,同齿轮啮合将切割马达的动力传输至切割装置。
防护机构(未图示)固定在从动轮353和切割装置之间,转动轴穿过防护机构,切割装置相对防护机构只发生旋转运动。防护壳355与切割马达35连接的一端可相对切割马达35旋转运动。
伸缩机构34为仅为弹性件34,弹性件34的一端固定在机身31上,另一端固定在防护机构上,在本实施例中,弹性件34为弹簧34,与防护机构连接即为与防护壳355连接。在其他实施方式中,该弹性件的另一端可以不与防护机构连接,而与打草机构连接。在弹簧34伸缩方向的下端设置有一端与机身31固定的限位杆36,用以限制打草机构34收回的程度。
请参见图11,本实施所示的自移动园艺设备3在工作状态时,防护机构在某处遇到障碍物,防护机构被施加沿o方向的力,弹簧34向o方向压缩,带动打草机构32向o方向移动,打草机构32由第一位置向机身31收回,避开障碍物。收回后的状态,请参见图12,防护机构越过障碍物后,防护机构被施的沿o方向的力消失,处于压缩状态下的弹簧34恢复原状,带动打草机构32向p方向移动,直到打草机构32恢复到第一位置。防护机构的任何位置都可以遇到障碍物。
上述三种结构自移动园艺设备中的机构的选择不仅限于实施例,如,第二种结构的自移动园艺设备中的防护机构可以采用第一种结构的自移动园艺设备中的防护机构。此外,自移动园艺设备中可以不安装切割马达,自移动园艺设备安装在割草机上使用时,可以采用割草机上的电机进行驱动。
综上,本发明所提供的自移动园艺设备通过致动件插入至凹槽内,驱动伸缩机构变形或移动,致使伸缩机构带动打草机构向机身内移动;致动件被拔出所述凹槽后,伸缩机构驱动打草机构向机身外移动,由用户通过操作致动件的插入或拔出来控制打草机构的的状态,提高设备的安全性能;
在工作状态下,当打草机构外围设置的防护机构遇到障碍物时,通过防护机构与伸缩机构的配合驱动打草机构向内收回,轻松越过障碍物,且同时可将障碍物边缘的草完全切割。该装置操作简单、省力、割草效果更佳、充分满足用户的需求。
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 自移动园艺设备及自移动园艺工作系统
- 自移动园艺设备