带集成式压力调节单元的双电机冗余制动系统及控制方法
文献发布时间:2023-06-19 11:34:14
技术领域
本发明属于汽车制动技术领域,具体地涉及液压制动系统中的伺服制动系统。
背景技术
汽车制动系统是指对汽车某些部分(主要是车轮)施加一定的力,从而对其进行一定程度的强制制动的一系列专门装置。制动系统的作用是:使行驶中的汽车按照驾驶员的要求进行强制减速甚至停车;使已停驶的汽车在各种道路条件下(包括在坡道上)稳定驻车;使下坡行驶的汽车速度保持稳定。
按制动能量的传输方式不同,制动系统可分为机械式、液压式、气压式、电磁式等。其中液压制动系统的制动能量传输方式是液压,即制动时通过压缩制动系统内的制动液使液压上升,液压传到轮边制动器上后会最终推动摩擦片贴紧至制动盘或制动鼓,产生阻碍车轮转动的制动力矩,最终由地面反作用于车轮一个与行驶方向相反的地面制动力,使车辆制动。气压制动系统的工作原理与此类似。
液压制动系统与气压制动系统相比,其优点有:
①液体的传输压力和速度高于气体,所以液压系统的传能装置的尺寸更小,布置更方便;
②传动滞后时间短,一般仅是气压传能装置的1/2;
③具有较高的传动效率和高的传动比;
④结构简单,系统不需要润滑;
⑤不消耗发动机的动力。
但是受限于整车前机舱的布置空间及助力器的选型,液压制动一般用在中低吨位车上。当前较高设计吨位的车辆上,多采用气压等方式制动。
现有技术方案中,在某个吨位阶梯范围内(如6吨及以下)采用大尺寸的单膜片真空助力器和双膜片真空助力器来实现液压制动助力,有的也会采用匹配有大扭矩控制电机的电液伺服制动总成来实现。
而当车辆的吨位更高时,当前的真空助力系统及电液制动系统均无法满足液压制动系统的制动性能。现有技术多采用气压制动方案解决。
现有技术主要存在以下缺点:
1.真空助力制动系统的缺点
真空助力器部分。设计吨位较大的车辆若采用真空助力器方案,通常需要很大尺寸(径向)的真空助力器,整车布置比较困难;而且受真空源能力及助力器助力比等的限制,无法实现足够大的制动助力,或者实现足够的制动助力时,无法实现相应理想的踏板力和踏板行程,使得踏板感比较差。
制动主缸部分。设计吨位较大的车辆,若采用液压制动方案,则需要匹配有相应规格的制动器。通常情况下,车辆吨位越高则制动器轮缸或分泵的尺寸就越大(以提供更大的制动力矩),这就直接导致了需液量的增大。
在制动踏板杠杆比尺寸(或踏板行程)不变的情况下,必然要求制动主缸缸径变大(制动主缸缸径增大后,在踩下一定踏板行程时,制动主缸可以压缩更多体积的制动液来满足需液量要求),根据“液压力×横截面积=作用力”这一关系可以了解,当横截面积增大后(即制动主缸缸径增大),在实现同样的制动系统压力下,作用力会变大,也就是说制动踏板力需要相应地增加,这样会变得不容易满足法规要求。
或者,在不改变制动主缸缸径的前提下,需要增加踏板行程来满足相应的需液量,这样就导致踏板行程变大,也更不容易满足法规要求。
2.电液伺服制动系统的缺点
电液伺服制动器部分。相对于真空助力器,电液伺服制动器通常径向尺寸相对于真空助力器短,所以在布置空间上问题不大;又由于电液伺服制动器可以调节踏板感,所以也不会有真空助力器踏板感糟糕的问题。但是受限于电机扭矩及传动机构强度,其输出的最大伺服力有限,即在一定的制动主缸缸径条件下,产生的最大制动系统压力一定,且制动主缸缸径越大,在同样的最大伺服力限制下,可输出的最大制动压力会变小。
制动主缸部分。和真空助力器方案类似,高吨位车辆通常有较高的需液量,如果制动主缸缸径偏大,虽然踏板行程会减小,但是正常制动建压时电机最终输出的伺服力要求会变高、应急制动时的踏板力也更不容易满足要求;如果制动主缸缸径设计较小,在制动建压时就需要较大的活塞行程,这虽然在解耦式电液伺服制动器上可能不存在问题,但是在应急制动时,很有可能在法规要求的踏板力及踏板行程要求下无法满足相应的减速度要求。
发明内容
本发明的目的是解决现有技术中真空助力器总成方案和单电液伺服制动器方案无法或难以满足较高设计吨位车辆伺服制动能力的问题,提出一种多功能双电机冗余制动系统及其控制方法。
为实现上述目的,本发明采用以下技术方案:
一种带集成式压力调节单元的双电机冗余制动系统,包括主电液伺服制动总成、辅电液伺服制动总成、制动踏板总成、主制动主缸、辅制动主缸、压力调节单元和制动器组;其中:
所述主电液伺服制动总成与所述辅电液伺服制动总成之间通讯连接,所述主电液伺服制动总成的两端分别与所述制动踏板和所述主制动主缸相连,所述辅电液伺服制动总成与所述辅制动主缸相连;
所述压力调节单元具有第一、第二和第三进油口和与所述制动器组中的四个制动器分别一一对应相连的出油口;所述主制动主缸的其中一出油口通过制动管路连接至第一进油口,并通过所述压力调节单元的第一出油口、第二出油口与对应的第一制动器组连通形成第一回路;所述主制动主缸的另一出油口通过制动管路连接至所述第二进油口,并通过所述压力调节单元的第三出油口、第四出油口与对应的第二制动器组连通形成第二回路;所述辅制动主缸的出油口通过制动管路连接至第三进油口,所述第三进油口的内部管路与所述第二进油口的内部管路并联后通过所述压力调节单元的第三出油口、第四出油口与所述第二制动器组连通形成第三回路;
所述压力调节单元中还集成有第一电磁阀和第二电磁阀,所述第一电磁阀和第二电磁阀分别设置在与所述第二进油口、第三进油口相连的内部管路上。
在工作时,所述第一电磁阀和第二电磁阀被设置为同步动作,在同一时刻其中一个处于连通状态,另一个处于关闭状态。其作用是使得与所述第一电磁阀和第二电磁阀相连的第二回路和第三回路其中一个连通,另一个关闭。
进一步地,所述主电液伺服制动总成包括主机械总成、第一主缸活塞行程传感器、主控制电机、制动踏板连接机构、制动踏板行程传感器、第一电流传感器、主控制器;其中,所述制动踏板连接机构和所述制动踏板总成相连,所述主机械总成和主制动主缸相连;所述第一主缸活塞行程传感器、制动踏板行程传感器、第一电流传感器分别用于检测所述主制动主缸的活塞行程、制动踏板行程、主控制电机的电流大小;所述主控制器用于接收所述第一主缸活塞行程传感器、制动踏板行程传感器、第一电流传感器的传感器信号,并作为控制依据;所述主控制电机与所述主控制器电连接,用于在所述主控制器的驱动下动作以推动所述主制动主缸的活塞运动进行建压;
所述辅电液伺服制动总成包括辅机械总成、第二主缸活塞行程传感器、辅控制电机、辅控制器、第二电流传感器;其中,所述辅机械总成和所述辅制动主缸相连;所述第二主缸活塞行程传感器、第二电流传感器分别用于检测所述辅制动主缸的活塞行程、辅控制电机的电流大小,所述辅控制器用于接收所述第二主缸活塞行程传感器、第二电流传感器的传感器信号,并作为控制依据;所述辅控制器与所述主控制器通讯连接;所述辅控制电机与所述辅控制器电连接,用于在所述辅控制器的驱动下动作以推动所述辅制动主缸的活塞运动进行建压。
进一步地,所述制动器组包括左前轮制动器、右前轮制动器、左后轮制动器和右后轮制动器。在一个优选实施例中,所述第一制动器组由所述左前轮制动器、右前轮制动器组成;所述第二制动器组由所述左后轮制动器和右后轮制动器组成。此时,四个制动器采用的是H型布置方式,在H型布置上可以实现更理想的压力分配,从而降低压力调节单元的工作频次,延长其寿命。在另一实施例中,所述第一制动器组由所述左后轮制动器和右后轮制动器组成;所述第二制动器组由所述左前轮制动器、右前轮制动器组成。
作为替代方案,在其他实施例中,四个制动器也可以采用其他的布置方式,譬如X型布置方式:第一制动器组由左前轮制动器和右后轮制动器组成,第二制动器组由右前轮制动器和左后轮制动器组成;或者第一制动器组由右前轮制动器和左后轮制动器组成,第二制动器组由左前轮制动器和右后轮制动器组成。或者,四个制动器采用同一侧的制动器组成一组的方式,即:第一制动器组由左前轮制动器和左后轮制动器组成,第二制动器组由右前轮制动器和右后轮制动器组成;或者第一制动器组由右前轮制动器和右后轮制动器组成,第二制动器组由左前轮制动器和左后轮制动器组成。
进一步地,在所述压力调节单元内设有第三电磁阀、第四电磁阀第五电磁阀、第六电磁阀、第七电磁阀、第八电磁阀、第九电磁阀和第十电磁阀。
所述第一进油口通过内部管路与并联设置的第四电磁阀、第六电磁阀的输入端连通,所述第四电磁阀的输出端通过管路与所述第一出油口连通,并且通过管路与第三电磁阀的输入端连通,所述第三电磁阀的输出端通过设有单向阀的第一蓄能回路连接至所述第一进油口,所述第四电磁阀的输入端和输出端之间还并联有带单向阀的旁路;所述第六电磁阀的输出端通过管路与所述第二出油口连通,并且通过管路与第五电磁阀的输入端连通,所述第五电磁阀的输出端与所述第三电磁阀的输出端通过管路并联连接至所述第一蓄能回路,第六电磁阀F的输入端和输出端之间还并联有带单向阀的旁路;
所述第二进油口通过内部管路连接至所述第一电磁阀的输入端,所述第一电磁阀的输出端通过内部管路与并联设置的第八电磁阀、第十电磁阀的输入端连通,所述第八电磁阀的输出端通过管路与所述第三出油口连通,并且通过管路与第七电磁阀的输入端连通,所述第七电磁阀的输出端通过设有单向阀的第二蓄能回路连接至与所述第一电磁阀的输出端相连的管路上,所述第八电磁阀的输入端和输出端之间还连接有带有单向阀的旁路;所述第十电磁阀的输出端通过管路与所述第四出油口连通,并且通过管路与第九电磁阀的输入端连通,所述第九电磁阀的输出端与所述七电磁阀的输出端通过管路并联连接至所述第二蓄能回路,第十电磁阀的输入端和输出端之间还并联有带单向阀的旁路;
所述第三进油口通过内部管路连接至所述第二电磁阀的输入端,所述第二电磁阀的输出端通过内部管路与所述第一电磁阀的输出端并联。
在具体实施例中,压力调节单元中的电磁阀均采用两位两通电磁阀。
进一步地,所述第一蓄能回路和所述第二蓄能回路结构相同,都包括通过管路依次相连的液压缓冲器、单向阀、液压泵、蓄能器和节流阀,所述液压泵两端的管路上还另外分别设置有单向阀。
更进一步地,与所述第一进油口相连的内部管路上还设有液压传感器。
在本发明中,第一蓄能回路和第二蓄能回路主要起到制动防抱死功能,其工作方式与传统的ABS工作方式及逻辑完全相同。
进一步地,所述双电机冗余制动系统还包括储液罐,用于向所述主制动主缸和所述辅主动主缸提供制动液。在一具体实施例中,所述储液罐连接在所述主制动主缸上,并通过管路与所述辅主动主缸相连。
本发明同时还提供了所述的带集成式压力调节单元的双电机冗余制动系统的控制方法,该控制方法主要包括:
驱动所述主制动主缸以提供制动能源,向所述压力调节单元的第一进油口对应的通道输入制动压力,并通过所述第一出油口、第二出油口对对应的第一制动器组建压;
同时控制所述压力调节单元中的第一电磁阀和第二电磁阀相反的通断状态,使所述第二进油口和第三进油口对应的通道其中一个开启,另一个关闭,从而选择由所述主制动主缸或者所述辅制动主缸提供制动能源,对所述第三出油口和第四出油口及对应的第二制动器组建压。
进一步地,所述控制方法具体包括线控制动模式、外部请求制动模式、制动能量回收辅助模式和人力备份制动模式;其中:
线控制动模式:在此模式下,车辆正常上电工作时,压力调节单元中的第一电磁阀和第二电磁阀通电后动作,第一电磁阀关闭,第二电磁阀开启,第二进油口对应的通道处于关闭状态,第三进油口对应的通道处于打开状态;当驾驶员踩下制动踏板时,所述主电液伺服制动总成和辅电液伺服制动总成均按照制动意图对整个制动系统建压,制动压力通过第一回路和第三回路传递到四个制动器,使车辆实现制动;
外部请求制动模式:在此模式下,车辆正常上电工作时,压力调节单元中的第一电磁阀和第二电磁阀通电后动作,第一电磁阀关闭,第二电磁阀开启,第二进油口对应的通道处于关闭状态,第三进油口对应的通道处于打开状态;当车辆的其它电控系统发来制动请求时,所述主电液伺服制动总成和辅电液伺服制动总成响应该制动请求对整个制动系统建压,制动压力通过第一回路和第三回路传递到四个制动器,使车辆实现制动;
制动能量回收辅助模式:在此模式下,车辆正常上电工作时,压力调节单元中的第一电磁阀和第二电磁阀通电后动作,第一电磁阀关闭,第二电磁阀开启,第二进油口对应的通道处于关闭状态,第三进油口对应的通道处于打开状态;在满足制动能量回收的前提下,根据制动目标曲线,在制动踏板被踩下的行程小于预设行程之前,所述主电液伺服制动总成和辅电液伺服制动总成的控制电机均不动作,此时主电液伺服制动总成的主控制器向整车发送能量回收的力矩请求,整车驱动电机响应能量回收的力矩请求,并对整车施加一个具有制动效果的反向力矩,实现整车制动;根据制动目标曲线,当制动踏板被踩下后的行程大于预设行程时,摩擦制动开始介入,和能量回收过程的反向力矩一同提供或仅由摩擦制动提供整车减速度;摩擦制动过程和线控制动过程相同;
人力备份制动模式:当控制电机失效或整车电源断路时,所述主电液伺服制动总成和辅电液伺服制动总成的控制电机均无法支持制动建压,压力调节单元中的第一电磁阀和第二电磁阀均不动作,第一电磁阀保持开启,第二电磁阀保持关闭,第二进油口对应的通道处于打开状态,第三进油口对应的通道处于关闭状态;此时驾驶员直接踩制动踏板,踏板力通过制动踏板连接机构一直传递到主电液伺服制动总成的活塞上,推动主制动主缸内的制动液压缩进行建压,制动压力通过第一回路和第二回路传递到四个制动器,实现人力备份制动。
在以上工作模式中,压力调节单元中仅描述了第一电磁阀和第二电磁阀的通断状态,其余电磁阀没有特别说明的情况下,均是不通电状态,此时第三电磁阀关闭、第四电磁阀开启、第五电磁阀关闭、第六电磁阀开启、第七电磁阀关闭、第八电磁阀开启、第九电磁阀关闭、第十电磁阀开启。
更进一步地,所述控制方法还包括冗余制动模式:
在冗余制动模式下,驾驶员踩下制动踏板或者车辆的其它电控系统发来制动请求时,当主电液伺服制动总成的主控制电机发生故障、辅电液伺服制动总成的辅控制电机正常工作时,仅由辅电液伺服制动总成的辅控制电机实施线控制动;当主电液伺服制动总成的主控制电机正常工作、辅电液伺服制动总成的辅控制电机发生故障时,仅由主电液伺服制动总成的主控制电机实施制动。当主电液伺服制动总成的主控制电机和辅电液伺服制动总成的辅控制电机均正常工作时,则由主电液伺服制动总成的主控制电机和辅电液伺服制动总成的辅控制电机共同实施制动。
以上冗余制动模式是电机失效应对的冗余制动安全策略。除此之外,冗余制动模式还可设计传感器失效应对的冗余制动安全策略,具体控制方法包括:
驾驶员踩下制动踏板或者车辆的其它电控系统发来制动请求时:
对于主电液伺服制动总成:
当主电液伺服制动总成的制动踏板行程传感器发生故障时,主电液伺服制动总成的主控制电机通过“定PWM控制”,实现制动系统建压;
当主电液伺服制动总成的制动踏板行程传感器正常工作、第一主缸活塞行程传感器正常工作,若第一电流传感器正常工作,则主控制电机通过“双闭环”控制,实现制动系统建压;若第一电流传感器发生故障时,则主控制电机通过“单位置环”控制,实现制动系统建压;
当主电液伺服制动总成的制动踏板行程传感器正常工作、第一主缸活塞行程传感器发生故障,若第一电流传感器正常工作,则主控制电机通过“单电流环”控制,实现制动系统建压;若第一电流传感器也发生故障时,则主控制电机通过“PWM控制”,实现制动系统建压;
对于辅电液伺服制动总成:
在制动踏板行程传感器正常工作时,若辅电液伺服制动总成的第二主缸活塞行程传感器正常工作、第二电流传感器正常工作,则辅电液伺服制动总成的辅控制电机通过“双闭环”控制,实现制动系统建压;若第二主缸活塞行程传感器工作正常、第二电流传感器发生故障,则辅控制电机通过“单位置环”控制,实现制动系统建压;若第二主缸活塞行程传感器发生故障,则第二电流传感器正常时辅控制电机通过“单电流环”控制实施制动系统建压,第二电流传感器也故障时辅控制电机通过“PWM控制”实施制动系统建压。
其中,“定PWM控制”(PWM,脉冲宽度调制)指的是当踏板行程传感器故障时,当驾驶员踩下制动踏板(即触发制动开关)后,主、辅电液伺服总成均按照固定的PWM输出控制各自的控制电机,实现制动系统建压,整车制动;“PWM控制”指的是“制动踏板行程~电机PWM”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“单电流环”指的是“制动踏板行程~电机控制电流”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“单位置环”指的是“制动踏板行程~制动主缸活塞顶杆位移”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“双闭环”指的是结合了单位置环和单电流环的一种闭环控制策略。
除了以上的工作模式(功能)之外,本发明还可实现制动防抱死功能,制动防抱死功能主要由第三电磁阀、第四电磁阀、第五电磁阀、第六电磁阀、第七电磁阀、第八电磁阀、第九电磁阀和第十电磁阀、液压传感器、单向阀、液压泵、蓄能器、节流阀、液压缓冲器共同起作用,与传统的ABS工作方式及逻辑完全相同。
由于采用上述技术方案,本发明提供的一种带集成式压力调节单元的双电机冗余制动系统与现有技术相比,具有以下优点:
1)在相似配置的电液伺服制动总成下,本发明通过采用两个电液伺服制动总成控制,可以实现更高吨位车辆的制动;
2)相对于单电液伺服制动总成方案,本发明具有更多冗余制动策略,使车辆行驶更安全;
3)相对于单电液伺服制动总成方案,本发明可以在降低对电机能力要求的情形下,满足车辆的制动需求;
4)相对于真空助力器,本发明可以在保证制动踏板感的前提下,实现更高效率的制动能量回收,可以实现外部请求制动(便于进行功能扩展),且受外界气压等因素影响极小;
5)本发明在H型布置方式的制动系统上可以实现更理想的制动压力分配,从而降低压力调节单元的工作频次,延长其寿命;
6)针对制动时载荷转移明显的H型制动系统布置方式的载货车辆,本发明可以优化其制动压力分配,降低制动器的损耗;
7)本发明将故障触发动作的电磁阀集成到了压力调节单元内,系统结构更加紧凑,布置更方便。
附图说明
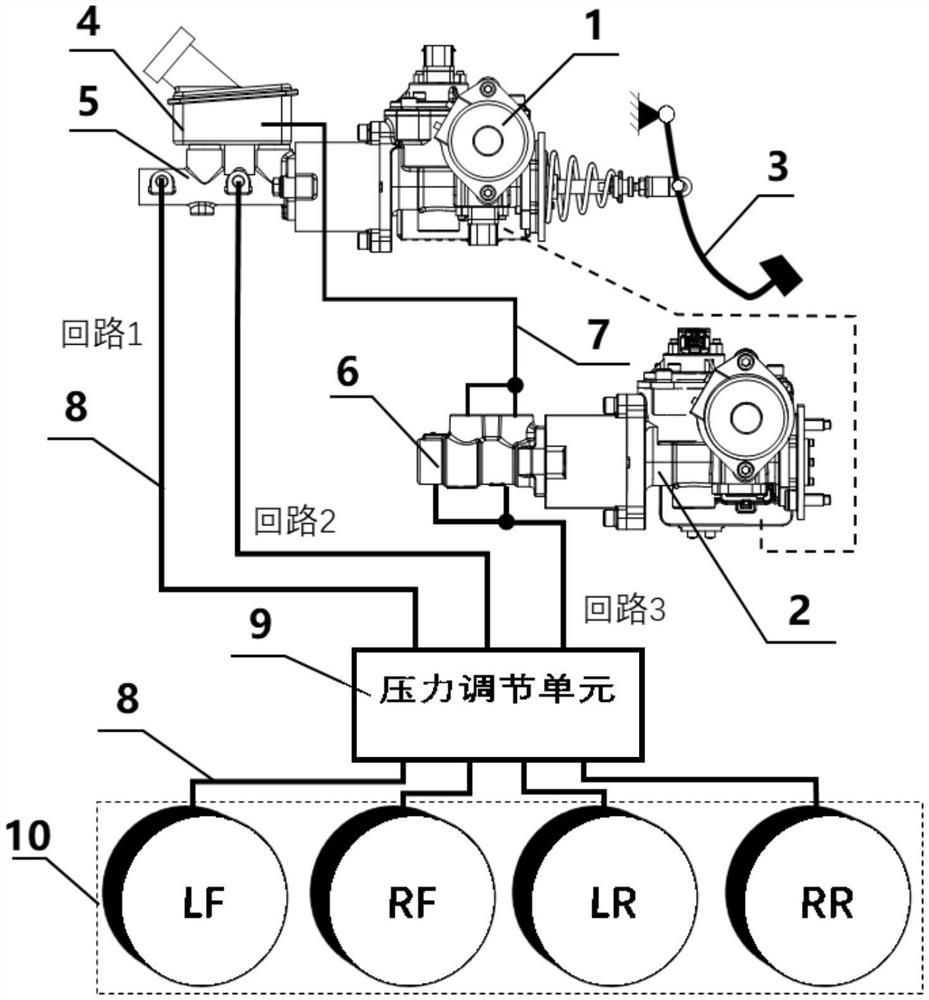
图1是本申请一种实施例的带集成式压力调节单元的双电机冗余制动系统的结构示意图。
图2是本申请一种实施例的主电液伺服制动总成的结构示意图。
图3是本申请一种实施例的辅电液伺服制动总成的结构示意图。
图4是本申请一种实施例的压力调节单元的一种工作状态的结构示意图。
图5是本申请一种实施例的压力调节单元的另一种工作状态的结构示意图。
图6是本申请一种实施例的传感器失效应对的冗余制动安全策略控制流程图。
图7是本申请一种实施例的电机失效应对的冗余制动安全策略控制流程图。
具体实施方式
为了使本技术领域的人员更好地理解本发明,下面将结合实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员所做的等效变化与修饰前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
实施例一
请参照图1,本实施例提供一种带集成式压力调节单元的双电机冗余制动系统,包括主电液伺服制动总成1、辅电液伺服制动总成2、制动踏板总成3、储液罐4、主制动主缸5、辅制动主缸6、压力调节单元9和制动器组10。其中:主电液伺服制动总成1与辅电液伺服制动总成2之间通过CAN总线通讯连接,主电液伺服制动总成1的两端分别与制动踏板总成3和主制动主缸5相连,辅电液伺服制动总成2与辅制动主缸6相连。本实施例中,制动器组10包括左前轮制动器LF、右前轮制动器RF、左后轮制动器LR和右后轮制动器RR。
请参照图2,主电液伺服制动总成1包括主机械总成101、第一主缸活塞行程传感器102、主控制电机103、制动踏板连接机构104、制动踏板行程传感器105、第一电流传感器106、主控制器107。其中,制动踏板连接机构104和制动踏板总成3相连,主机械总成101和主制动主缸5相连。具体地,制动踏板总成3的左侧与主制动主缸5相连,右侧与制动踏板连接机构4相连,如图2所示。第一主缸活塞行程传感器102、制动踏板行程传感器105、第一电流传感器106分别用于检测主制动主缸5的活塞行程、制动踏板行程(与踏板踩下深度对应)、主控制电机103的电流大小。主控制器107用于接收第一主缸活塞行程传感器102、制动踏板行程传感器105、第一电流传感器106的传感器信号,并作为控制依据。主控制电机103与主控制器107电连接,用于在主控制器107的驱动下动作以推动主制动主缸5的活塞运动进行建压。主控制器107通过驱动主控制电机103动作,推动主机械总成101最左端的顶杆,推动主制动主缸5的活塞运动,压缩制动液使制动系统建压。
请参照图3,辅电液伺服制动总成2包括辅机械总成201、第二主缸活塞行程传感器202、辅控制电机203、辅控制器204、第二电流传感器205。其中,辅机械总201和辅制动主缸6相连。具体地,辅制动主缸6连接在辅机械总成201的左侧。第二主缸活塞行程传感器202、第二电流传感器205分别用于检测辅制动主缸6的活塞行程、辅控制电机203的电流大小,辅控制器204用于接收第二主缸活塞行程传感器202、第二电流传感器205的传感器信号,并作为控制依据。辅控制器204与主控制器107通过CAN总线通讯连接。辅控制电机203与辅控制器204电连接,辅控制电机203在辅控制器204的驱动下动作,推动辅机械总成201最左端的顶杆,以推动辅制动主缸6的活塞运动进行建压。
本实施例中,储液罐4用于向主制动主缸5和辅主动主缸6提供制动液。储液罐4优选地连接在主制动主缸5上,并通过低压管路7与辅主动主缸6相连。
请参照图4,压力调节单元9主要由HCU(液压调节单元)和ECU(控制器)组成,液压调节单元具有第一、第二和第三进油口a、b、c和与制动器组10中的四个制动器分别一一对应相连的出油口d、e、f、g。进油口a、b、c前端与制动主缸出油口相连,出油口d~g后端与制动器进油口相连。主制动主缸5的其中一出油口通过制动管路连接至第一进油口a,并通过压力调节单元9的第一出油口d、第二出油口e与对应的第一制动器组连通形成第一回路,即如图4所示的回路1。主制动主缸5的另一出油口通过制动管路连接至第二进油口b,并通过所述压力调节单元9的第三出油口f、第四出油口g与对应的第二制动器组连通形成第二回路,即如图4所示的回路2。辅制动主缸6的出油口通过制动管路连接至第三进油口c,第三进油口c的内部管路与第二进油口b的内部管路并联后通过压力调节单元9的第三出油口f、第四出油口g与第二制动器组连通形成第三回路,即如图4所示的回路3。压力调节单元9中还集成有第一电磁阀A和第二电磁阀B,第一电磁阀A和第二电磁阀B分别设置在与第二进油口b、第三进油口c相连的内部管路上。在具体工作时,所述第一电磁阀A和第二电磁阀B被设置为同步动作,在同一时刻其中一个处于连通状态,另一个处于关闭状态。其中,第一回路、第二回路、第三回路中的制动管路均采用的是高压管路8。
在本实施例中,制动器组10的四个制动器两两一组,第一制动器组由所述左前轮制动器LF、右前轮制动器RF组成;第二制动器组由左后轮制动器LR和右后轮制动器RR组成。压力调节单元9的出油口d~g分别与LF、RF、LR、RR相连。此时,四个制动器采用的是H型布置方式,在H型布置上可以实现更理想的压力分配,从而降低压力调节单元的工作频次,延长其寿命。
在压力调节单元9的液压调节单元内还设有第三电磁阀C、第四电磁阀D、第五电磁阀E、第六电磁阀F、第七电磁阀G、第八电磁阀H、第九电磁阀I和第十电磁阀J。在本实施例中,压力调节单元中的电磁阀A~J均采用两位两通电磁阀。
第一进油口a通过内部管路与并联设置的第四电磁阀D、第六电磁阀F的输入端连通,第四电磁阀D的输出端通过管路与所述第一出油口d连通,并且通过管路与第三电磁阀C的输入端连通,第三电磁阀C的输出端通过设有单向阀L的第一蓄能回路连接至第一进油口a,第四电磁阀D的输入端和输出端之间还并联有带单向阀的旁路。第六电磁阀F的输出端通过管路与所述第二出油口e连通,并且通过管路与第五电磁阀E的输入端连通,第五电磁阀E的输出端与第三电磁阀C的输出端通过管路并联连接至所述第一蓄能回路;第六电磁阀F的输入端和输出端之间还并联有带单向阀的旁路。
第二进油口b通过内部管路连接至第一电磁阀A的输入端,第一电磁阀A的输出端通过内部管路与并联设置的第八电磁阀H、第十电磁阀J的输入端连通,第八电磁阀H的输出端通过管路与第三出油口f连通,并且通过管路与第七电磁阀G的输入端连通,第七电磁阀G的输出端通过设有单向阀L的第二蓄能回路连接至与第一电磁阀A的输出端相连的管路上,第八电磁阀H的输入端和输出端之间还连接有带有单向阀的旁路。第十电磁阀J的输出端通过管路与第四出油口g连通,并且通过管路与第九电磁阀I的输入端连通,第九电磁阀I的输出端与七电磁阀G的输出端通过管路并联连接至所述第二蓄能回路,第十电磁阀J的输入端和输出端之间还并联有带单向阀的旁路。
第三进油口c通过内部管路连接至第二电磁阀B的输入端,第二电磁阀B的输出端通过内部管路与第一电磁阀A的输出端并联。
进一步地,所述第一蓄能回路和所述第二蓄能回路结构相同,都包括通过管路依次相连的液压缓冲器P、单向阀L、液压泵M、蓄能器N和节流阀O,液压泵M两端的管路上还另外分别设置有单向阀L。第一蓄能回路的液压缓冲器P与第三电磁阀C、第五电磁阀E的输出端通过管路连通,第二蓄能回路的液压缓冲器P与第七电磁阀G、第九电磁阀I的输出端连通。
第一进油口a相连的内部管路上还设有液压传感器K。
在本发明中,第一蓄能回路和第二蓄能回路主要起到制动防抱死功能,其工作方式与传统的ABS工作方式及逻辑完全相同。
主电液伺服制动总成1具备的功能有:线控制动模式、外部请求制动模式、制动能量回收辅助模式和人力备份制动模式等;辅电液伺服制动总成2在上述系统中具有外部请求制动功能。
单个电液伺服制动总成的功能实现过程如下:
对于主电液伺服制动总成1而言,当驾驶员踩下制动踏板一段行程后,电液伺服制动总成的踏板行程传感器105将制动意图传递到主控制器107,经过主控制器107的计算,输出给控制电机103控制目标,电机被驱动后推动活塞前移对制动系统建压。活塞行程传感器102和电流传感器106分别用于位移和电流的闭环控制。
对于辅电液伺服制动总成2而言,当辅控制器204接收到外部请求制动命令后,会按照计算结果输出给辅控制电机203控制目标,电机被驱动后推动活塞前移对制动系统建压。第二活塞行程传感器202和第二电流传感器205分别用于位移和电流的闭环控制。
本发明同时还提供了所述的带集成式压力调节单元的双电机冗余制动系统的控制方法,该控制方法主要步骤是:驱动主制动主缸5以提供制动能源,向压力调节单元9的第一进油口a对应的通道输入制动压力,并通过第一出油口d、第二出油口e对对应的第一制动器组建压;同时控制所述压力调节单元9中的第一电磁阀A和第二电磁阀B相反的通断状态,使第二进油口b和第三进油口c对应的通道其中一个开启,另一个关闭,从而选择由主制动主缸5或者辅制动主缸6提供制动能源,对第三出油口f和第四出油口g及对应的第二制动器组建压。
以下将控制方法结合上述双电机冗余制动系统的功能实现过程进行详细描述。
1、线控制动模式
请参照图5所示,在此模式下,车辆正常上电工作时,压力调节单元9中的第一电磁阀A和第二电磁阀B通电后动作,第一电磁阀A关闭,第二电磁阀B开启,第二进油口b对应的通道处于关闭状态,第三进油口c进油口对应的通道处于打开状态;其余电磁阀C~J均不通电,此时第三电磁阀C关闭、第四电磁阀D开启、第五电磁阀E关闭、第六电磁阀F开启、第七电磁阀G关闭、第八电磁阀H开启、第九电磁阀I关闭、第十电磁阀J开启。当驾驶员踩下制动踏板总成3时,所述主电液伺服制动总成1和辅电液伺服制动总成2均按照制动意图对整个制动系统建压,制动压力通过第一回路和第三回路传递到四个制动器,使车辆实现制动。
具体过程如下:
当驾驶员踩下制动踏板总成3一段行程后,主控制器107接收到制动踏板行程传感器105变化的信号,根据制动目标曲线计算出主、辅电液伺服制动总成合适的电机控制目标(或者两个控制器各自根据踏板行程计算控制目标)。主控制器107直接驱动主控制电机103动作;同时辅控制器204通过CAN通讯方式接收到电机控制目标,驱动辅控制电机203动作,两者对整个制动系统建压。
关于压力建立过程。主制动主缸5建压时,左侧腔的制动液通过回路1进入压力调节单元9的进油口a,然后分别经过电磁阀D和F,通过出油口d和e分别对LF、RF的制动器增压;由于电磁阀A通电后油路被封闭,所以主制动主缸5右侧腔的制动液无法作用到轮边制动器;由于电磁阀B通电后油路被接通,辅制动主缸6建压时,制动液通过回路3进入到压力调节单元9的进油口c,然后分别经过电磁阀H和J,通过出油口f和g分别对RF、RR的制动器增压。即在线控制动模式下,主电液伺服制动总成1和辅电液伺服制动总成2分别只对前轴制动器(LF、RF)和后轴制动器(LR、RR)建压。
关于压力释放过程。当制动踏板总成3松开后,被压缩的制动液均沿着建压的回路回流,压力被释放。
2、外部请求制动模式
在此模式下,车辆正常上电工作时,压力调节单元9中的第一电磁阀A和第二电磁阀B通电后动作,第一电磁阀A关闭,第二电磁阀B开启,第二进油口b对应的通道处于关闭状态,第三进油口c进油口对应的通道处于打开状态;其余电磁阀C~J均不通电,此时第三电磁阀C关闭、第四电磁阀D开启、第五电磁阀E关闭、第六电磁阀F开启、第七电磁阀G关闭、第八电磁阀H开启、第九电磁阀(I)关闭、第十电磁阀J开启。当车辆的其它电控系统发来制动请求时,即主控制器107接收到外界的制动压力或整车减速度请求时,响应该制动请求并计算出主、辅电液伺服制动总成合适的电机控制目标,直接驱动控制电机103动作;同时辅控制器204通过CAN通讯方式接收电机控制目标,驱动辅控制电机203动作,两者对整个制动系统建压,制动压力通过第一回路和第三回路传递到四个制动器,使车辆实现制动。
过程类似于线控制动,不同之处在于外部请求制动不需要踏板行程信号输入。上述关于电机控制目标的计算,也可以由主控制器107、辅控制器204各自计算。
3、制动能量回收辅助模式
在此模式下,车辆正常上电工作时,压力调节单元9中的第一电磁阀A和第二电磁阀B通电后动作,第一电磁阀A关闭,第二电磁阀B开启,第二进油口b对应的通道处于关闭状态,第三进油口c进油口对应的通道处于打开状态;其余电磁阀C~J均不通电,此时第三电磁阀C关闭、第四电磁阀D开启、第五电磁阀E关闭、第六电磁阀F开启、第七电磁阀G关闭、第八电磁阀H开启、第九电磁阀I关闭、第十电磁阀J开启;在满足制动能量回收条件的前提下,根据制动目标曲线,在制动踏板总成3被踩下的行程小于预设行程(某小段行程)之前,主、辅电液伺服制动总成的主控制电机103、辅控制电机203均不动作,此时主电液伺服制动总成1的主控制器107向整车发送能量回收的力矩请求,整车驱动电机响应能量回收的力矩请求,并对整车施加一个具有制动效果的反向力矩,实现整车制动;根据制动目标曲线,当制动踏板总成3被踩下后的行程大于预设行程时,摩擦制动开始介入,和能量回收过程的反向力矩一同提供或仅由摩擦制动提供整车减速度;摩擦制动过程和线控制动过程相同。
4、人力备份制动模式
请参照图4所示,当控制电机失效或整车电源断路时,主电液伺服制动总成1和辅电液伺服制动总成2的控制电机均无法支持制动建压,压力调节单元9中的第一电磁阀A和第二电磁阀B均不动作,第一电磁阀A保持开启,第二电磁阀B保持关闭,第二进油口b对应的通道处于打开状态,第三进油口c进油口对应的通道处于关闭状态;其余电磁阀C~J保持不通电状态,此时第三电磁阀C关闭、第四电磁阀D开启、第五电磁阀E关闭、第六电磁阀F开启、第七电磁阀G关闭、第八电磁阀H开启、第九电磁阀I关闭、第十电磁阀J开启;此时驾驶员可以直接踩制动踏板总成3,踏板力通过制动踏板连接机构104一直传递到主电液伺服制动总成1的活塞顶杆上,推动主制动主缸5内的活塞向前移动,压缩制动液对制动系统进行建压,制动压力通过第一回路和第二回路传递到四个制动器,实现人力备份制动。
关于压力建立过程。主制动主缸5压缩制动液,左侧活塞腔内的制动液通过回路1、压力调节单元9的进油口a,分别通过电磁阀D和F,通过d和e分别作用在LF和RF上;右侧活塞腔内的制动液通过回路2、压力调节单元9的进油口b,分别通过电磁阀H和J,通过f和g分别作用在LR和RR上。
关于压力释放过程。当制动踏板总成3松开后,被压缩的制动液均沿着建压的回路回流,压力被释放。
5、冗余制动模式
当电液伺服制动总成自身或者其传感器故障时,本申请描述的双电机冗余制动系统可以实现多种冗余制动功能,最大限度保证制动安全。
(1)传感器失效应对的冗余制动安全策略
请参照图6所示,驾驶员踩下制动踏板总成3或者车辆的其它电控系统发来制动请求时:
对于主电液伺服制动总成1:
当主电液伺服制动总成1的制动踏板行程传感器105发生故障时,主电液伺服制动总成1的主控制电机103通过“定PWM控制”,实现制动系统建压;
当主电液伺服制动总成1的制动踏板行程传感器105正常工作、第一主缸活塞行程传感器102正常工作,若第一电流传感器106正常工作,则主控制电机103通过“双闭环”控制,实现制动系统建压;若第一电流传感器106发生故障时,则主控制电机103通过“单位置环”控制,实现制动系统建压;
当主电液伺服制动总成1的制动踏板行程传感器105正常工作、第一主缸活塞行程传感器102发生故障,若第一电流传感器106正常工作,则主控制电机103通过“单电流环”控制,实现制动系统建压;若第一电流传感器106也发生故障时,则主控制电机103通过“PWM控制”,实现制动系统建压。
对于辅电液伺服制动总成2:
在制动踏板行程传感器105正常工作时,若辅电液伺服制动总成2的第二主缸活塞行程传感器202正常工作、第二电流传感器205正常工作,则辅电液伺服制动总成的辅控制电机203通过“双闭环”控制,实现制动系统建压;若第二主缸活塞行程传感器202工作正常、第二电流传感器205发生故障,则辅控制电机203通过“单位置环”控制,实现制动系统建压;若第二主缸活塞行程传感器202发生故障,则第二电流传感器205正常时辅控制电机203通过“单电流环”控制实施制动系统建压,第二电流传感器205也故障时辅控制电机203通过“PWM控制”实施制动系统建压。
其中,“定PWM控制”(PWM,脉冲宽度调制)指的是当踏板行程传感器故障时,当驾驶员踩下制动踏板(即触发制动开关)后,主、辅电液伺服总成1和2均按照固定的PWM输出控制各自的控制电机103和203,实现制动系统建压,整车制动;“PWM控制”指的是“制动踏板行程~电机PWM”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“单电流环”指的是“制动踏板行程~电机控制电流”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“单位置环”指的是“制动踏板行程~制动主缸活塞顶杆位移”之间的关系,通过一一对应的关系,驾驶员踩下制动踏板一段行程后,制动系统会对应建立相应大小的压力;“双闭环”指的是结合了单位置环和单电流环的一种闭环控制策略。
(2)电机失效应对的冗余制动安全策略
请参照图7所示,驾驶员踩下制动踏板总成3或者车辆的其它电控系统发来制动请求时,当主电液伺服制动总成1的主控制电机103发生故障、辅电液伺服制动总成2的辅控制电机203正常工作时,仅由辅电液伺服制动总成2的辅控制电机203实施制动;当主电液伺服制动总成1的主控制电机103正常工作、辅电液伺服制动总成2的辅控制电机203发生故障时,仅由主电液伺服制动总成1的主控制电机103实施制动。
当主电液伺服制动总成1的主控制电机103和辅电液伺服制动总成2的辅控制电机203均正常工作时,则由主电液伺服制动总成1的主控制电机103和辅电液伺服制动总成2的辅控制电机203共同实施制动。
6、制动防抱死
除了以上的工作模式(功能)之外,本申请的双电机冗余制动系统还可实现制动防抱死功能,制动防抱死功能主要由电磁阀C~J、液压传感器K、单向阀L、液压泵M、蓄能器N、节流阀O、液压缓冲器P共同起作用,与传统的ABS工作方式及逻辑完全相同。
实施例二
本实施例中的双电机冗余制动系统的结构与实施例一基本相同,其区别在于:本实施例中的第一制动器组由左后轮制动器LR和右后轮制动器RR组成;第二制动器组由左前轮制动器LF、右前轮制动器RF组成。压力调节单元9的出油口d~g分别与LR、RR、LF、RF相连。此时,制动系统为H型布置方式。
实施例三
本实施例中的双电机冗余制动系统的结构与实施例一基本相同,其区别在于:本实施例中的第一制动器组由左前轮制动器LF和右后轮制动器组成RR,第二制动器组由右前轮制动器RF和左后轮制动器LR组成。压力调节单元9的出油口d~g分别与LF、RR、RF、LR相连。此时,制动系统为X型布置方式。
实施例四
本实施例中的双电机冗余制动系统的结构与实施例一基本相同,其区别在于:本实施例中的第一制动器组由右前轮制动器RF和左后轮制动器LR组成,第二制动器组由左前轮制动器LF和右后轮制动器组成RR。压力调节单元9的出油口d~g分别与RF、LR、LF、RR相连。此时,制动系统为X型布置方式。
以上所述仅为本发明较佳的实施方式,并非用以限定本发明的保护范围;同时以上的描述,对于相关技术领域中具有通常知识者应可明了并据以实施,因此其他未脱离本发明所揭露概念下所完成之等效改变或修饰,都应涵盖在本发明的保护范围之内。
- 带集成式压力调节单元的双电机冗余制动系统及控制方法
- 带集成式压力调节单元的双电机冗余制动系统