一种具有电磁制动系统的婴儿学步车
文献发布时间:2023-06-19 11:34:14
技术领域
本发明涉及母婴用品技术领域,具体是一种具有电磁制动系统的婴儿学步车。
背景技术
现有的婴儿学步车,不具备制动系统,当婴儿行走到斜坡上,而家长又未及时发现时,会出现意外情况,同时当婴儿学步车制动完成后,婴儿在惯性作用下,向前倾靠在车体上,这样就使得婴儿学步车的重心向前倾斜,会发生侧翻的问题,因此具有改进的必要。
发明内容
本发明的目的在于提供一种具有电磁制动系统的婴儿学步车,以解决上述背景技术中提出的问题。
本发明的技术方案是:一种具有电磁制动系统的婴儿学步车,包括一车体,所述车体具有一下安装座和上安装座,所述下安装座和上安装座之间通过连接支架固定连接,所述下安装座内部中空;第一行走轮组件,两个所述第一行走轮组件分别设置在所述下安装座底面的两端;第二行走轮组件,所述第二行走轮组件设置在所述下安装座底面上的中间位置处,所述下安装座内部与所述第一行走轮相对应的位置处开设有环形滑道;所述婴儿学步车还包括电磁制动系统,所述电磁制动系统设置在所述下安装上,且与所述第一行走轮组件连接;
婴儿保护机构,所述婴儿保护机构设置在所述车体上,当婴儿发生意外情况时,所述婴儿保护机构能对婴儿起到保护并且能控制车体处于平衡状态。
所述第一行走轮组件包括一第一万向调节件,所述第一万向调节件固定设置在所述下安装座的底面上;第一车轮连接件,所述第一车轮连接件铰接在所述第一万向调节件上;第一车轮,所述第一车轮转动连接在所述第一车轮连接件上;所述第一车轮连接件的内侧壁上开设有连接卡槽。
所述第二行走轮包括一第二万向调节件,所述第二万向调节件固定设置在所述下安装座的底面上;第二车轮连接件,所述第二车轮连接件铰接在所述第二万向调节件上;第二车轮,所述第二车轮转动连接在所述第二车轮连接件上。
所述电磁制动系统包括电磁推块,所述电磁推块固定设置在所述下安装座的内部上端,且正对于所述第一行走轮组件;电磁推杆,所述电磁推杆的一端位于所述下安装座的内部,且位于所述电磁推块的正下方,所述电磁推杆的另一端位于所述第一车轮的正上方,所述电磁推杆靠近所述第一车轮的一端固定设置有制动弧片,所述制动弧片的弧度与所述第一车轮相适应,所述电磁推杆位于所述下安装座内部的一端固定设置有第一连接杆;滑块,所述滑块滑动设置在所述环形滑道内,所述滑块通过第一连接弹簧与所述第一连接杆连接;第二连接杆,所述第二连接杆固定设置在所述电磁推杆的圆周侧壁上,所述第二连接杆卡接在所述连接卡槽内。
所述电磁制动系统还包括一倾角传感器,所述倾角传感器设置在所述下安装座的外侧壁上,所述倾角传感器与所述电磁推块电性连接。
所述婴儿保护机构包括垫板,所述垫板通过弹性连接组件与所述车体连接,所述垫板的两侧壁上固定设置有把手;配重球,所述配重球在初始状态下位于所述下安装座内部的中间位置处,所述配重球通过拉绳与所述垫板的侧壁下端固定连接;保护绷带,所述保护绷带的上端通过弹力绳与所述连接支架上;连接绳,所述连接绳的一端设置在所述保护绷带上,所述连接绳的另一端与所述拉绳连接,且所述连接绳与所述拉绳交错连接。
所述弹性连接组件包括第二连接弹簧,所述第二连接弹簧的一端与所述垫板的一端面下侧连接,所述第二连接弹簧的另一端与所述下安装座连接;第三连接弹簧,所述第三连接弹簧的一端与所述垫板一端面的上侧连接,所述第三连接弹簧的另一端与所述上安装座连接。
有益效果
本发明通过改进在此提供一种具有电磁制动系统的婴儿学步车,与现有技术相比,具有如下改进及优点:
1.通过设置电磁制动系统,当倾角传感器感应婴儿学步车处于斜面上时,电磁制动系统能对婴儿学步车进行制动,从而避免了当婴儿行走到斜坡上,并且家长并未及时发现时,婴儿学步车发生事故的问题,提高了婴儿学步车的安全性能。
2.通过设置婴儿保护机构,这样就使得,婴儿学步车的整体重心处于中间位置,从而避免了因为婴儿不能平稳站立而导致的婴儿学步车重心向前倾斜同时婴儿学步车前翻的问题,提高了婴儿学步车的安全性能。
3.当在平稳路面上行走时,婴儿在平稳路上行走过快时,也能调节婴儿学步车的重心位置,从而提高了婴儿学步车的安全性能,提高本发明的实用性。
附图说明
下面结合附图和实施例对本发明作进一步解释:
图1为本发明的等轴测结构示意图;
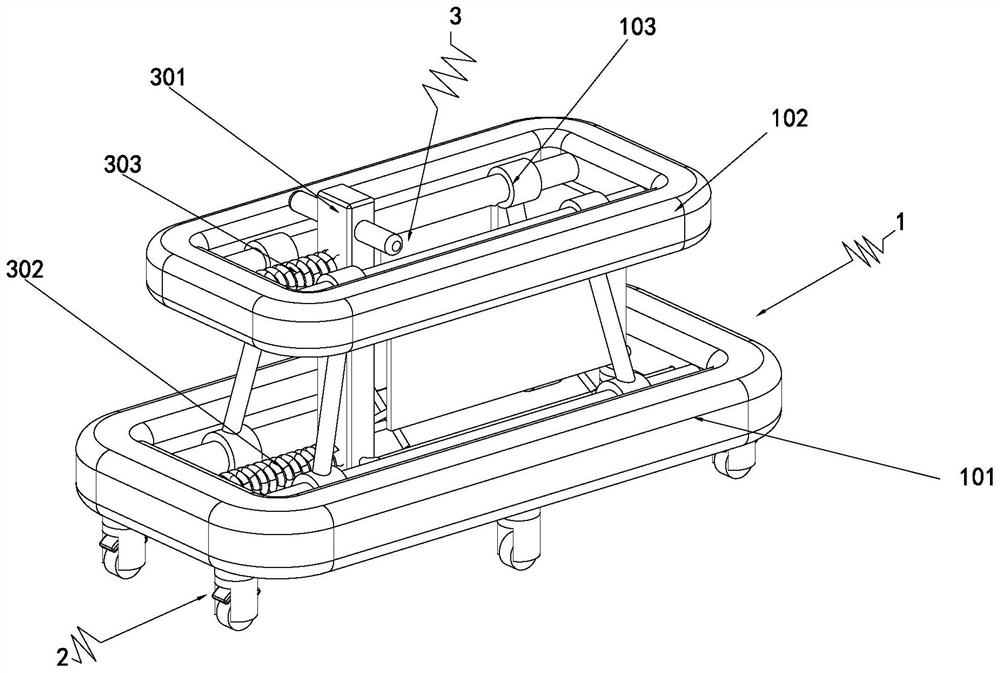
图2为本发明中车体及电磁制动系统的等轴测结构示意图;
图3为本发明中车体及电磁制动系统的等轴测剖视结构示意图;
图4为图3中A处放大图;
图5为本发明的一个等轴测剖视结构示意图;
图6为本发明的另一个等轴测剖视结构示意图;
图7为图6中B处放大图;
图8为本发明中电磁制动系统的连接关系等轴测结构示意图;
图9为本发明中电磁制动系统的连接关系等轴测剖视结构示意图。
图中,车体1、下安装座101、上安装座102、连接支架103、第一行走轮组件104、第二行走轮组件105、环形滑道1011、电磁制动系统2、婴儿保护机构3、第一万向调节件1041、第一车轮连接件1042、第一车轮1043、连接卡槽10421、电磁推块201、电磁推杆202、制动弧片203、第一连接杆2021、滑块2022、第一连接弹簧2023、第二连接杆2024、垫板301、把手3011、配重球304、拉绳305、保护绷带306、弹力绳308、连接绳307、第二连接弹簧302、第三连接弹簧303。
具体实施方式
下面将结合附图1至图9对本发明进行详细说明,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-9所示,本发明为一种具有电磁制动系统的婴儿学步车,包括一车体1,所述车体1具有一下安装座101和上安装座102,下安装座101和上安装座102之间通过连接支架103固定连接,下安装座101内部中空;第一行走轮组件104,两个第一行走轮组件104分别设置在下安装座101底面的两端;第二行走轮组件105,第二行走轮组件105设置在下安装座101底面上的中间位置处,下安装座101内部与第一行走轮104相对应的位置处开设有环形滑道1011;婴儿学步车还包括电磁制动系统2,电磁制动系统2设置在下安装101上,且与第一行走轮组件104连接;
婴儿保护机构3,婴儿保护机构3设置在车体1上,当婴儿发生意外情况时,婴儿保护机构3能对婴儿起到保护并且能控制车体1处于平衡状态。
第一行走轮组件104包括一第一万向调节件1041,第一万向调节件1041固定设置在下安装座101的底面上;第一车轮连接件1042,第一车轮连接件1042铰接在第一万向调节件1041上;第一车轮1043,第一车轮1043转动连接在第一车轮连接件1042上;第一车轮连接件1042的内侧壁上开设有连接卡槽10421。
第二行走轮105包括一第二万向调节件,第二万向调节件固定设置在下安装座101的底面上;第二车轮连接件,第二车轮连接件铰接在第二万向调节件上;第二车轮,第二车轮转动连接在第二车轮连接件上。
电磁制动系统2包括电磁推块201,电磁推块201固定设置在下安装座101的内部上端,且正对于第一行走轮组件104;电磁推杆202,电磁推杆202的一端位于下安装座101的内部,且位于电磁推块201的正下方,电磁推杆202的另一端位于第一车轮1043的正上方,电磁推杆202靠近第一车轮1043的一端固定设置有制动弧片203,制动弧片203的弧度与第一车轮1043相适应,电磁推杆202位于下安装座101内部的一端固定设置有第一连接杆2021;滑块2022,滑块2022滑动设置在环形滑道1011内,滑块2022通过第一连接弹簧2023与第一连接杆2021连接;第二连接杆2024,第二连接杆2024固定设置在电磁推杆202的圆周侧壁上,第二连接杆2024卡接在连接卡槽10421内。
电磁制动系统还包括一倾角传感器,倾角传感器设置在下安装座1的外侧壁上,倾角传感器与电磁推块201电性连接。
婴儿保护机构3包括垫板301,垫板301通过弹性连接组件与车体1连接,垫板301的两侧壁上固定设置有把手3011;配重球304,配重球304在初始状态下位于下安装座101内部的中间位置处,配重球304通过拉绳305与垫板301的侧壁下端固定连接;保护绷带306,保护绷带306的上端通过弹力绳308与连接支架103上;连接绳307,连接绳307的一端设置在保护绷带306上,连接绳307的另一端与拉绳305连接,且连接绳307与拉绳305交错连接。
弹性连接组件包括第二连接弹簧302,第二连接弹簧302的一端与垫板301的一端面下侧连接,第二连接弹簧302的另一端与下安装座101连接;第三连接弹簧303,第三连接弹簧303的一端与垫板301一端面的上侧连接,第三连接弹簧303的另一端与上安装座102连接。
本发明的工作原理:
当倾角传感器感应婴儿学步车处于斜面上时,会驱动电磁推块201启动,然后推动电磁推杆202向下运动,当电磁推杆202向下运动时,会带动制动弧片203向下运动,从而对婴儿学步车的第一行走轮组件104进行制动;从而避免了当婴儿行走到斜坡上,并且家长并未及时发现时,婴儿学步车发生事故的问题,提高了婴儿学步车的安全性能。
由于当婴儿学步车制动完成后,婴儿在惯性作用下,向前倾靠在垫板301上,这样就使得婴儿学步车的重心向前倾斜,会发生侧翻的问题;
因此当婴儿倾靠在垫板301上时,会使得弹性连接组件收缩,从而带动垫板301向靠近弹性连接组件的方向运动,这样就使得拉绳305能带动配重球304向远离垫板301的方向运动,这样就使得,婴儿学步车的整体重心处于中间位置,从而避免了因为婴儿不能平稳站立而导致的婴儿学步车重心向前倾斜,从而使得婴儿学步车前翻的问题,提高了婴儿学步车的安全性能;
进一步的,由于连接绳307是交错设置在拉绳305上的,这样使得当婴儿倾靠在垫板301上时,会使得保护绷带306向中间收拢,从而能对婴儿起到保护作用;
并且,当婴儿在平稳路上前行时,当婴儿行走的速度过快时,婴儿也会压迫垫板301,从而通过拉绳305带动配重球304向反方向运动,从而使得当婴儿在平稳路上行走过快时,也能调节婴儿学步车的重心位置,从而提高了婴儿学步车的安全性能,提高本发明的实用性。
以上所述仅为本发明的较佳实施例,并非因此限制本发明的专利保护范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种具有电磁制动系统的婴儿学步车
- 一种具有新型坐垫靠背的婴儿学步车