导线弧垂测量主机和测量方法
文献发布时间:2023-06-19 11:37:30
技术领域
本发明涉及电力作业技术领域,更具体的涉及一种导线弧垂测量主机和测量方法。
背景技术
弧垂是架空输电线路安全运行的重要指标,若弧垂过大,输电线路容易受到风力的作用而发生舞动;而弧垂过小,会因导线存在张力而发生断股等事故,给电力输送带来严重影响。因此无论是对于设计部门、施工单位还是运行维护部门,都应从经济性和安全性角度出发,保证架空输电线路弧垂的大小处于设计规定的范围内。
目前,电网企业获取架空输电线路弧垂值的方法非常有限,想获得架空输电线路弧垂值一般有两种方法:一种是通过电力员工在巡线的过程中对架空输电线路进行弧垂的测量,但是测量所获得的数据量非常有限,而且架空输电线路所处位置很多位于山区,地势相对复杂,给人工巡线测量弧垂带来很大困扰;第二种是通过在架空输电线路上安装弧垂红外监测装置,这种方法可以实时对架空输电线路进行弧垂监测,但是如果同时安装如此多的监测设备,前期需要投入大量成本以及后期需要大量的人员对相关设备进行维护,这无疑大大增加了电网公司成本投入以及造成大量的人力资源浪费问题。
其他测量输电线路弧垂的方法有:经纬仪测角法、图像分辨法以及应力测量法等。但是这些在线测量方法对于一些特定的环境具有一定的应用性,也存在着不小的弊端,如需要测量的数据很多、测量过程很繁琐,测量精度较低,测量装置使用安装不便,测量方法适用性差等。因此现有技术中亟需一种能够快速且精准测量出架空输电线弧垂的装置。
发明内容
针对现有技术的不足,本发明提供了一种导线弧垂测量主机和测量方法,可直观、简便且精准的在3D空间内生成出测量导线弧垂的形状,提高了架空线路导线弧垂测量的速度与精度。
为实现上述目的,本发明提供了如下技术方案:
一种导线弧垂测量方法,其特征在于包括:
在两杆塔的绝缘子上固定标志器,用于设定测量主机运行的始点和终点;
将带有RTK流动站的测量主机以移动式结构设置在线缆上,并且利用地面操控主机控制测量主机的移动、停止;
RTK流动站在移动过程中,与位于地面上的RTK地面基站进行载波相位差分计算,同时采集北斗观测数据,并在系统内组成差分观测值进行实时处理,实时得出所在导线的定位坐标信息;
测量主机通过无线通讯模块将RTK流动站得出的定位坐标信号发送至地面操控主机,地面操控主机接收定位坐标信息后通过3D空间建模技术实时绘制出导线的弧垂形状。
优选的,当所测导线弧垂未能达到要求时,测量主机停止行走,施工人员根据停留点的坐标位置信息,对导线进行预紧作业,当达到弧垂要求后地面操控主机反馈给施工人员。
优选的,对于多分裂导线的施工环境下,测量主机测完其中一根导线后,停留在导线上,通过测量主机上携带的360°激光雷达对多分裂导线中的其余导线进行激光扫描,测得导线之间的相对位置坐标,发送给地面操控主机,地面操控主机绘制出多分裂导线的3D建模。
优选的,多分裂导线的3D建模具体步骤为:
步骤a:测量主机沿导线行走过程中,将RTK流动站的定位坐标信息发送给地面操控主机;
步骤b:测量主机沿导线行走过程中,分别停留在导线的各个位置点,通过测量主机上携带的360°激光雷达对多分裂导线中的其他导线进行激光扫描,测得导线之间的相对位置坐标信息;
步骤c:测量主机测量过程中,将步骤a和步骤b中获取的的数据通过无线通讯模块传输给地面操控主机,地面操控主机绘制出多分裂导线的3D建模。
一种导线弧垂测量主机,其特征是:包括主机壳以及设置于主机壳上的:
自定位抱线行走机构,所述主机壳通过自定位抱线行走机构移动式设置于导线上;
主控电路,与自定位抱线行走机构电性连接,以控制自定位抱线行走机构的移动或停止;
RTK流动站,与主控电路电性连接,同时与设置于地面的RTK地面基站无线通讯连接,以得出所在导线位置的定位坐标信息;
无线通信模块,与主控电路电性连接,以接收以及发送无线信息;
移动电源,为整机供电。
优选的,所述主机壳上还设置有360°激光雷达。
优选的,所述RTK流动战通过电台天线与RTK地面基站通讯连接,所述无线通信模块包括无线天线,所述电台天线和无线天线均设置于主机壳的底面上,并倾斜指向地面,并通过主机壳的底盖遮盖。
优选的,所述自定位抱线行走机构包括驱动轮组件和自定位抱线组件,所述驱动轮组件与自定位抱线组件之间形成供导线穿过的导线抱紧位。
优选的,所述驱动轮组件包括驱动轮体和电机;所述驱动轮体和所述电机均安装于主机壳的安装板上,并且所述电机的输出轴与驱动轮体连接。
优选的,所述自定位抱线组件包括支架、升降板组件、弹性支撑组件和限位轮;
所述升降板组件通过支架安装于主机壳上,并且升降板组件能够相对于支架上下移动;
所述限位轮具有两个并且通过弹性支撑组件设置于升降板组件上,以及两个限位轮形成V型结构并位于驱动轮体的下方。
本发明的优点为:通过测量主机能够精准的定位出导线上各个位置点的定位坐标信息,并通过3D建模的方式,在3D空间内生成出测量导线弧垂形状,直观并且操作简便,无需通过收集数据再处理,极大的提高了架空线路导线测量的速度与精度。
附图说明
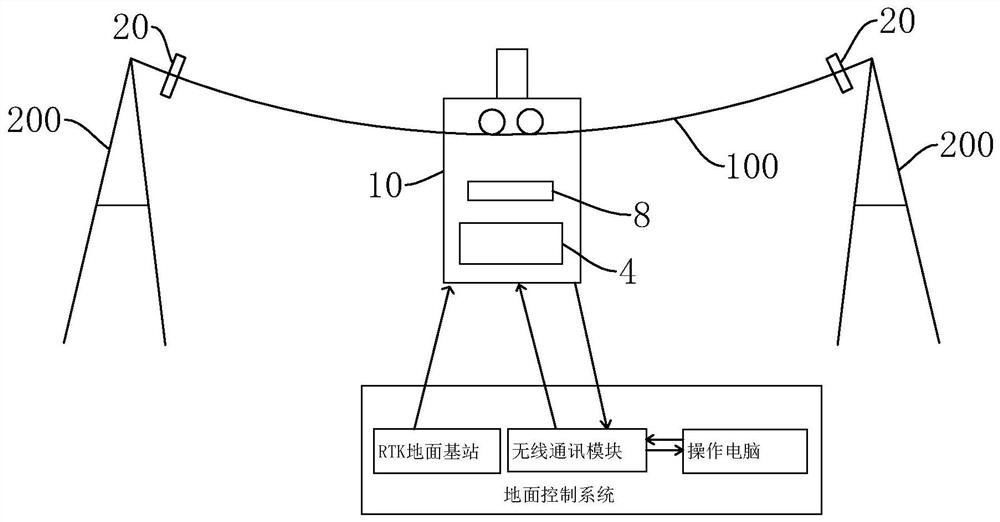
图1为本实施例所提供的导线弧垂测量方法实施框架图;
图2为本实施例所提供的导线弧垂测量主机的爆炸图;
图3为本实施例所提供的导线弧垂测量主机正面去除前壳后的示意图;
图4为本实施例所提供的自定位抱线组件的示意图;
图5为本实施例所提供的限位块的示意图;
图6为本实施例所提供的定位销与定位槽的配合示意图;
图7为本实施例所提供的导线弧垂测量主机的示意图。
具体实施方式
结合图1至图7对本发明导线弧垂测量主机和测量方法作进一步的说明。
一种导线弧垂测量方法,主要运用标志器20、地面控制系统以及带有RTK流动站4的测量主机10进行测量,地面控制系统涵盖RTK地面基站和地面操控主机,本实施例中,地面操控主机使用的是操作电脑;地面控制系统中的操作电脑与测量主机10以及RTK流动站4通过无线通讯模块5建立无线通讯连接,RTK流动站4与RTK地面基站通过电台天线建立无线通讯连接。弧垂具体测量过程包括:
在两杆塔200的绝缘子上固定标志器20,用于设定测量主机10运行的始点和终点;
将带有RTK流动站4的测量主机10以可移动式结构设置在两杆塔200之间的导线100上,利用地面操控主机控制测量主机10在导线100上的移动、停止;
RTK流动站4在移动过程中,与位于地面上的RTK地面基站进行载波相位差分计算,同时为了提升精度,RTK流动站4通过北斗定位天线7采集北斗观测数据,并在RTK流动站4内组成差分观测值进行实时处理,快速给出所在位置的厘米级定位坐标信息;
测量主机10通过无线通讯模块5将RTK流动站4实时得出的定位坐标信号发送至地面操控主机,地面操控主机接收定位坐标信息后通过3D空间建模技术实时绘制出导线100的弧垂形状,直观便捷。由于RTK本身厘米级的定位精度,以及本装置可实时测得导线100各个位置的定位数据,使得拟合出的导线弧垂具有极高的精度。
当所测导线100弧垂未能达到要求时,测量主机10停止行走,施工人员根据停留点的坐标位置信息,对导线100进行预紧作业,当达到弧垂要求后地面操控主机反馈给施工人员。
对于多分裂导线100的施工环境下,测量主机10测完其中一根导线100后,停留在导线100上,通过测量主机10上携带的360°激光雷达6对多分裂导线100中的其余导线进行激光扫描,测得各导线之间的相对位置坐标信息,发送给地面操控主机,地面操控主机绘制出多分裂导线100弧垂的3D建模。
多分裂导线100的3D建模具体步骤为:步骤a:测量主机10沿导线100行走过程中,将RTK流动站的定位坐标信息发送给地面操控主机;步骤b:测量主机10沿导线100行走过程中,分别停留在导线100的各个位置点,通过测量主机10上携带的360°激光雷达6对多分裂导线100中的其他导线进行激光扫描,测得各导线之间的相对位置坐标信息;步骤c:测量主机10测量过程中,将步骤a和步骤b中获取的数据通过无线通信模块传输给地面操控主机,地面操控主机绘制出多分裂导线的3D建模。
一种导线弧垂测量主机,其特征是:测量主机10包括主机壳以及设置于主机壳上的:自定位抱线行走机构2,所述主机壳通过自定位抱线行走机构2移动式设置于导线100上;主控电路3,与自定位抱线行走机构2电性连接,以控制自定位抱线行走机构2的移动或停止;RTK流动站4,与主控电路3电性连接,同时与设置于地面的RTK地面基站无线通讯连接,以得出所在导线100位置的定位坐标信息;无线通信模块,与主控电路3电性连接,以接收以及发送无线信息;移动电源5,为整机供电。
主机壳包括一竖直状态的安装板11、位于安装板11底部并且与安装板11垂直的底板14、罩设在安装板11背面的后壳12、罩设在安装板11正面的前壳13以及罩设在底板14底面上的底盖15。RTK流动站4安装于底板14上,并位于安装板11的正面;电池5位于RTK流动站4的上方;前壳13将RTK流动站4以及电池遮挡在内部;主控电路3为一主控PCB,该主控PCB固定于安装板11的背面,并由后壳12遮挡。
所述自定位抱线行走机构2包括驱动轮组件21和自定位抱线组件22,所述驱动轮组件21与自定位抱线组件22之间形成供导线100穿过的导线抱紧位。具体的,所述驱动轮组件21包括电机213和两个驱动轮体211;所述驱动轮体211和所述电机213均安装于主机壳安装板11的正面上,电机213的输出轴穿过安装板11位于安装板11的背面,同时驱动轮体211的转轴的端部也穿过安装板11并位于安装板11的背面,电机213的输出轴与驱动轮体211的转轴通过同步带传动组212连接,同步带传动组具体包括齿轮和同步带。自定位抱线组件22具有两组,分别位于驱动轮体211的前侧和后侧;每组所述的自定位抱线组件22均包括支架224、升降板组件223、弹性支撑组件222和限位轮221;所述支架224包括两个竖直状态的立杆2241,两根立杆2241的下端通过一安装架2243安装于前壳13的外表面上;升降板组件223设置于支架224上,并且升降板组件223能够相对于支架224上下移动;所述限位轮221具有两个并且形成V型结构位于驱动轮体211的下方,以及所述的两个限位轮221通过弹性支撑组件222设置于升降板组件223上。基于上述结构,通过驱动轮体211以及限位轮221能够稳定的将导线100限定在导线抱紧位中;通过电机213以及同步带传动组的传动,实现测量主机10在导线100上的行走;弹性支撑组件222对限位轮221起到弹性支撑的效果,使得限位轮221自适应性的抵靠在导线100上;本实施例中,电机213、电池、RTK流动站4、同步带传动组、主控PCB的结构布局设计,使得测量主机10整体结构非常紧凑,使得整个测量主机10重量小于6kg,降低测量主机10在导线100上移动时对导线100弧垂测量的影响,保证了测量精度。
所述升降板组件223包括升降滑块2231和定位销2232;所述升降滑块2231上具有定位孔和两个滑孔,升降滑块2231通过滑孔滑动配合在支架224上;所述定位销2232配合在定位孔内,并且在定位孔和定位销2232之间设置有带动定位销2232抵压至支架224的第一弹簧2233。进一步的,在支架224的侧壁上具有多个沿支架224高度方向排列并且供定位销2232的端部卡入的定位槽22411。定位槽22411的上壁22412为倾斜设置,底壁22413为水平设置,相应的定位销2232的端部具有与定位槽22411上壁22412配合的倾斜面22321和与定位槽底壁22413配合的水平面22322。定位销2232的水平面22322支撑在定位槽的底面22413上,能够限制升降滑块2231的下降,因此在不外拉定位销2232的情况下,升降滑块2231不会下落;定位槽的上壁22412为倾斜,同时定位销2232与该上壁配合的面也为倾斜面22321,因此在不外拉定位销2232的情况下,直接向上推动升降滑块2231,倾斜面会起到导向的作用,使得定位销2232脱离定位槽,实现升降滑块2231的向上滑动,操作简单。
所述自定位抱线组件22还包括有限位块226和限位柱225,所述限位块226转动安装于支架224中的其中一根立杆2241的顶部,并且在限位块226的下表面上具有多个限位杆2261、2262、2263,多个所述的限位杆2261、2262、2263轴长不一;所述限位柱225设置于升降板组件223上,并且能够支撑在不同的限位杆2261、2262、2263上。
具体的,限位块226上具有中心孔,并且通过中心孔套装在其中一根支杆2241上,在限位块226的内部设置有磁铁,限位块226通过磁铁吸附在支杆2241顶部的限位板2242上,在限位块226的下表面上成型或是插装有三根成圆周均匀排列的限位杆2261、2262、2263。限位柱225成型或是插装在升降滑块2231上,并且与其中一个限位杆2261、2262、2263对应,因此当限位块226克服磁铁吸附力转动后,能与不同轴承的限位杆2261、2262、2263对应,以对整个升降板组件223起到限位的作用,具有操作简单、定位稳定的特点。
所述弹性支撑组件222包括导向杆2222、连接座2221和第二弹簧2223。所述导向杆2222成竖直状态滑动配合在升降滑块2231的装配孔内;所述连接座2221固定于导向杆2222的上端,两个限位轮221通过转轴成V型结构安装在连接座2221的上表面;第二弹簧2223套装在导向杆2222上,第二弹簧2223的两端分别抵靠在连接座2221和升降滑块2231上。该结构下,能够对限位轮221实现弹性支撑,使得限位轮221能够自适应的抵靠在导线100上。
在所述主机壳上还设置有360°激光雷达6,通过该激光雷达6,能够对多分裂导线100的坐标进行定位。具体的,测量主机10停留在多分裂导线100的其中一根导线上,激光雷达6对其余导线100进行扫描,测得导线100之间的相对位置坐标。
所述RTK流动战通过电台天线9与RTK地面基站通讯连接,所述无线通信模块包括无线天线5,所述电台天线和无线天线均设置于主机壳的底面上,并倾斜指向地面,并通过主机壳的底盖15遮盖。由于操作人员将测量主机10携带至高空导线100上时,经常会发生晃动或是轻微磕碰的情况,如果天线外露设计,经常会把天线碰坏。而本实施例将无线天线和电台天线设置在主机壳最底部,并倾斜指向地面;一能防止主机壳本身对天线造成的信号屏蔽,第二地面控制系统位于地面上,天线指向地面使得与地面通讯更加强。
在主机壳内还设置有能与标志器感应的RFID模块30,在标志器内设置有RFID电子标签卡。具体实施时,将两个标识器分别固定在两杆塔的绝缘子初始点,用于设定测量主机10运行的始点和终点,当测量主机10运行到标识器一定范围内时,测量主机10自动减速运行,当运行至近距离后,近距离红外漫反射传感器感应到标识器红外发射板后立刻刹车停止。利用Rfid进行远距离识别,不受环境和导线100自身的反射影响,可靠性高,通过远距离提前减速,保证近距离能够及时停止,不至于撞到标识器。
如无特殊说明,本发明中,若有术语“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此本发明中描述方位或位置关系的用语仅用于示例性说明,不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以结合附图,并根据具体情况理解上述术语的具体含义。
除非另有明确的规定和限定,本发明中,若有术语“设置”、“相连”及“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 导线弧垂测量主机和测量方法
- 一种输电线路架空导线弧垂测量装置及其测量方法