一种清水箱系统及清洁机器人
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及自动清洁设备领域,特别是涉及一种清水箱系统及清洁机器人。
背景技术
近年来,随着人工成本的不断增加和物业服务智能化的不断进步,物业清洁机器人越来越多地进入住宅小区、写字楼、医院等应用场景。
在使用过程中,智能化水平高的物业清洁机器人大多采用自动补给清水、自动喷洒清水、自动洗地的作业模式。
在机器人自动补给清水时,经常会出现因为液位传感器灵敏度差、信号传输偶发延时等原因,致使自动补给清水不能及时停止,清水从清水箱补给口溢出。在机器人自主行进过程中,往往会由于地面凹凸不平、机器人加减速等各种原因,造成机器人出现不同程度的颠簸情况,进而造成清水箱内清水的涌动,清水亦会从补给口溢出。上述两种情况,补给口溢出的清水都会进入机器人内部,对内部电器件造成很大危害。
针对上述情况,业内通常采用加大补给口和水箱实际液面的高度差加以解决。但是,高度差过大,就会牺牲掉很多水箱实际使用体积,进而造成机器人整体体积加大,而清洁机器人体积轻量化又是一个很重要的指标。高度差过小,只会使得清水溢出的概率降低,该问题并不能彻底解决。
因此,以上两种方式弊端过于明显,均不能作为解决上述问题的较优解决方案。
为解决物业清洁机器人出现的上述问题,本发明提供一种清水箱系统及清洁机器人。
发明内容
基于此,本发明的目的在于,提供一种结构紧凑、布局合理、构思巧妙、缓冲遮挡效果好、防涌动效果好、自动化的清水箱系统及清洁机器人。
本发明的清水箱系统,包括:
清水箱体;
注水部,所述注水部设置于所述清水箱体上部,且所述注水部与所述清水箱体连通,所述注水部开设有注水口;
遮挡缓冲部,所述遮挡缓冲部连通于所述清水箱体和所述注水部之间;
液位检测组件,所述液位检测组件设置于所述清水箱体上以检测所述清水箱体内的液位。
本发明的清水箱系统通过在注水部和清水箱体之间设置遮挡缓冲部,可以利用遮挡缓冲部对清水形成缓冲和遮挡,减弱清水涌动的强度和冲击力度,降低清水从注水部溢出的可能性,且最大限度利用清水箱体的体积,解决了清水从清水箱体进入清洁机器人内部的问题;利用液位检测组件自动检测清水箱体内的液位情况,从而启动自动补水命令,自动化、智能化程度高。
上述技术方案在一种实施方式中,所述注水部的底板自所述注水口向所述清水箱体方向向下倾斜;
所述遮挡缓冲部包括遮挡部和缓冲部;
所述遮挡部连接于所述注水部和所述缓冲部之间,所述缓冲部与所述清水箱体连通;
所述遮挡部与所述缓冲部设置为自上而下的阶梯形。
将所述注水部的底板倾斜设置,使得所述注水部内的清水可以顺势向所述清水箱体方向流动,防止清水在所述注水部堆积;所述遮挡部和所述缓冲部分别起到对清水的遮挡和缓冲的作用,能够有效减弱清水涌动的强度和冲击力;被所述遮挡部遮挡遮挡的清水可以在重力的作用下流向所述缓冲部,并流回所述清水箱体内。
上述技术方案在一种实施方式中,所述遮挡部的上端高于所述注水部的底板所在平面;
所述遮挡部的中部开设有凹槽,所述凹槽的底面低于所述注水部的底板所在平面;
所述缓冲部的底板自其与所述遮挡部连接处向所述清水箱体方向向下倾斜。
将所述遮挡部的上端设置为高于所述注水部的底板所在平面,可以使所述遮挡部挡住清水的冲击,减少清水进入所述注水部;所述遮挡部开设的凹槽则可以将所述注水部内的清水导出到所述缓冲部,防止清水在所述注水部堆积;将所述缓冲部的底板自其与所述遮挡部连接处向所述清水箱体方向向下倾斜,可以使清水在重力的作用下向所述清水箱体方向流动。
上述技术方案在一种实施方式中,所述清水箱系统还包括遮挡板,所述遮挡板竖向设置于所述缓冲部的空间内;
所述遮挡板的上部开设有排气孔,其下部开设有排水孔;
所述遮挡板的下端与所述缓冲部的底板之间设置有间隙。
所述遮挡板可以形成对清水的第一层遮挡,能够极大减弱清水涌动的幅度和冲击的力度;所述排气孔可使得清水箱体内部气体流动顺畅;所述排水孔可通过清水,不致涌动的清水对遮挡板冲击力过大;设置的所述间隙有利于清水向所述清水箱体回流。
上述技术方案在一种实施方式中,所述清水箱系统还包括可视水管,所述可视水管竖向设置于所述清水箱体的一侧,所述可视水管的上端连接有第一引流管,所述可视水管的下端与所述清水箱体的下部连通。利用所述可视水管,可在外观表面观察清水箱体内水面高度,方便对设备维修、维护,利用所述第一引流管可以将高于正常液位的清水引出,避免所述清水箱体内的液位过高。
上述技术方案在一种实施方式中,所述清水箱系统包括支架,所述支架竖向设置于所述清水箱体的一侧,所述可视水管固定于所述支架上;
所述可视水管的两端分别安装有快插接头,位于所述可视水管上端的快接插头与所述第一引流管连接,位于所述可视水管下端的快接插头与所述清水箱体的下部连通。
利用所述支架将所述可视水管固定,增强所述可视水管固定的牢固性;利用所述快插接头可以实现将所述可视水管与所述清水箱体及所述第一引流管的快速拆装,便于维护。
上述技术方案在一种实施方式中,所述清水箱系统还包括第二引流管,所述第二引流管的内径大于或等于所述第一引流管的外径,所述第二引流管套设于所述第一引流管的出口;
所述第一引流管水平设置,所述第二引流管竖直设置。
在极偶发的清水多余情况下,所述第二引流管可以进一步将所述第一引流管引流出的清水引流至地面,彻底解决清水进入机器人内部的问题。
上述技术方案在一种实施方式中,所述清水箱体的下部设置有出水口;
所述清水箱系统还包括过滤器和出水泵,所述过滤器连接于所述出水口和所述出水泵之间。
所述过滤器可以解决由于清水中杂质对泵或阀的损坏,降低维修、维护工作量。
上述技术方案在一种实施方式中,所述液位检测组件包括上液位传感器和下液位传感器,所述上液位传感器和所述下液位传感器分设于所述清水箱体的上部和下部。所述上液位传感器和所述下液位传感器分别检测所述清水箱体的上限液位和下限液位,从而进行补水或停止补水操作,避免所述清水箱体内的液位过高或过低。
本发明还提供了一种清洁机器人,包括骨架及上述任一项所述的清水箱系统,所述清水箱系统设置于所述骨架上。
相对于现有技术,本发明的清水箱系统及清洁机器人通过在注水部和清水箱体之间设置遮挡缓冲部,可以利用遮挡缓冲部对清水形成缓冲和遮挡,减弱清水涌动的强度和冲击力度,降低清水从注水部溢出的可能性,且最大限度利用清水箱体的体积,解决了清水从清水箱体进入清洁机器人内部的问题;利用液位检测组件自动检测清水箱体内的液位情况,从而启动自动补水命令,自动化、智能化程度高。本发明的清水箱系统及清洁机器人具有结构紧凑、布局合理、构思巧妙、缓冲遮挡效果好、防涌动效果好、自动化等特点。
为了更好地理解和实施,下面结合附图详细说明本发明。
附图说明
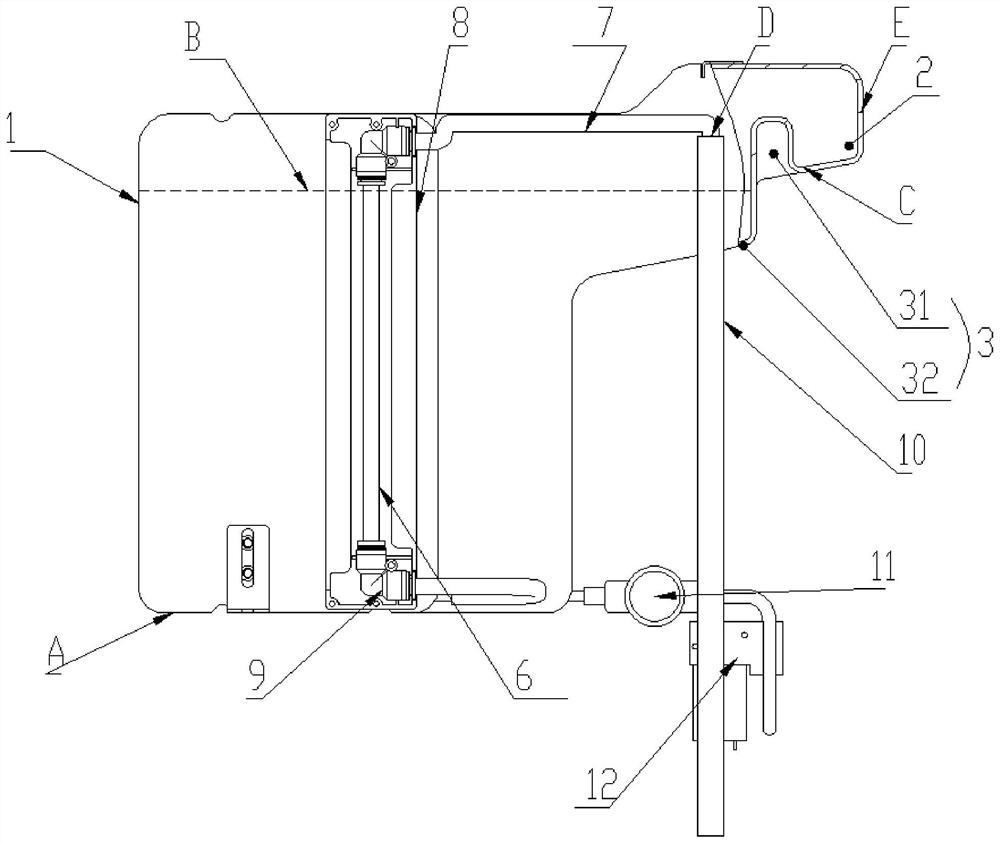
图1是本发明的清水箱系统优选结构的结构示意图。
图2是清水箱体优选结构的俯视图。
图3是图2中A-A向的局部剖视图。
图4是图3中C-C向的剖视图。
图5是本发明的清水箱系统优选结构侧视图之一。
图6是本发明的清水箱系统优选结构侧视图之二。
图7是本发明的清水箱系统优选结构侧视图之三。
其中,图1中,A为下液位面;B为上液位面;C为注水部液面;D为引流面;E为注水口面。
具体实施方式
在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于其构造进行定义的,它们是相对的概念。因此,有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的方法的例子。
在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
请参阅图1-图7。本发明的清水箱系统,包括清水箱体1、注水部2、遮挡缓冲部3和液位检测组件4。
所述注水部2设置于所述清水箱体1上部,且所述注水部2与所述清水箱体1连通,所述注水部2开设有注水口21。
所述遮挡缓冲部3连通于所述清水箱体1和所述注水部2之间。
所述液位检测组件4设置于所述清水箱体1上以检测所述清水箱体1内的液位,所述液位检测组件4可与补水泵电性连接,所述补水泵的出口与所述注水部2连接。
通过在注水部2和清水箱体1之间设置遮挡缓冲部3,可以利用遮挡缓冲部3对清水形成缓冲和遮挡,减弱清水涌动的强度和冲击力度,降低清水从注水部2溢出的可能性,且最大限度利用清水箱体1的体积,解决了清水从清水箱体1进入清洁机器人内部的问题;利用液位检测组件4自动检测清水箱体1内的液位情况,从而启动自动补水命令,自动化、智能化程度高。
具体地,所述注水部2的底板自所述注水口21向所述清水箱体1方向向下倾斜。
所述遮挡缓冲部3包括遮挡部31和缓冲部32。
所述遮挡部31连接于所述注水部2和所述缓冲部32之间,所述缓冲部32与所述清水箱体1连通。
所述遮挡部31与所述缓冲部32设置为自上而下的阶梯形。
将所述注水部2的底板倾斜设置,使得所述注水部2内的清水可以顺势向所述清水箱体1方向流动,防止清水在所述注水部2堆积;所述遮挡部31和所述缓冲部32分别起到对清水的遮挡和缓冲的作用,能够有效减弱清水涌动的强度和冲击力;被所述遮挡部31遮挡遮挡的清水可以在重力的作用下流向所述缓冲部32,并流回所述清水箱体1内。
优选地,所述遮挡部31的上端高于所述注水部2的底板所在平面。
所述遮挡部31的中部开设有凹槽,所述凹槽的底面低于所述注水部2的底板所在平面。
所述缓冲部32的底板自其与所述遮挡部31连接处向所述清水箱体1方向向下倾斜。
将所述遮挡部31的上端设置为高于所述注水部2的底板所在平面,可以使所述遮挡部31挡住清水的冲击,减少清水进入所述注水部2;所述遮挡部31开设的凹槽则可以将所述注水部2内的清水导出到所述缓冲部32,防止清水在所述注水部2堆积;将所述缓冲部32的底板自其与所述遮挡部31连接处向所述清水箱体1方向向下倾斜,可以使清水在重力的作用下向所述清水箱体1方向流动。
进一步,所述清水箱系统还包括遮挡板5,所述遮挡板5竖向设置于所述缓冲部32的空间内。
所述遮挡板5可以形成对清水的第一层遮挡,能够极大减弱清水涌动的幅度和冲击的力度。
本实施例的所述遮挡板5优选地设置为可拆卸的形式,具体为:在所述缓冲部32的上方开设长条状的安装孔320;将所述遮挡板5设置为L形,其长边插入所述安装孔320,其短边卡在所述安装孔320外部。使所述遮挡板5形成可拆卸形式,方便拆装维护。
所述遮挡板5的上部开设有排气孔,其下部开设有排水孔。所述排气孔和所述排水孔均设置为竖直方向的长圆孔,且所述排气孔和所述排水孔均优选地设置为水平方向的一排。所述排气孔可使得清水箱体1内部气体流动顺畅;所述排水孔可通过清水,不致涌动的清水对遮挡板5冲击力过大。
所述遮挡板5的下端与所述缓冲部32的底板之间设置有间隙。设置的所述间隙有利于清水向所述清水箱体1回流。
所述注水部2、所述遮挡缓冲部3及所述清水箱体1可采用滚塑一次成型,各部分结构极易实现,也不需要增加其他零部件,构思巧妙,极大减少了加工、装配工作量。并且,本发明最大限度使用清水箱体1的体积,没有该部分体积的浪费情况,满足了清洁机器人体积轻量化、结构紧凑的需求。
进一步,所述液位检测组件4包括上液位传感器41和下液位传感器42,所述上液位传感器41和所述下液位传感器42分设于所述清水箱体1的上部和下部。所述上液位传感器41和所述下液位传感器42分别检测所述清水箱体1的上限液位和下限液位,从而进行补水或停止补水操作,避免所述清水箱体1内的液位过高或过低。
优选地,所述清水箱系统还包括可视水管6,所述可视水管6竖向设置于所述清水箱体1的一侧,所述可视水管6的上端连接有第一引流管7,所述可视水管6的下端与所述清水箱体1的下部连通。利用所述可视水管6,可在外观表面观察清水箱体1内水面高度,方便对设备维修、维护,利用所述第一引流管7可以将高于正常液位的清水引出,避免所述清水箱体1内的液位过高。
进一步,所述清水箱系统包括支架8,所述支架8竖向设置于所述清水箱体1的一侧,所述可视水管6固定于所述支架8上。
所述可视水管6的两端分别安装有快插接头9,位于所述可视水管6上端的快接插头与所述第一引流管7连接,位于所述可视水管6下端的快接插头与所述清水箱体1的下部连通。
利用所述支架8将所述可视水管6固定,增强所述可视水管6固定的牢固性;利用所述快插接头9可以实现将所述可视水管6与所述清水箱体1及所述第一引流管7的快速拆装,便于维护。
进一步,所述清水箱系统还包括第二引流管10,所述第二引流管10的内径大于或等于所述第一引流管7的外径,所述第二引流管10套设于所述第一引流管7的出口。
所述第一引流管7水平设置,所述第二引流管10竖直设置。
在极偶发的清水多余情况下,所述第二引流管10可以进一步将所述第一引流管7引流出的清水引流至地面,彻底解决清水进入机器人内部的问题。
优选地,所述清水箱体1的下部设置有出水口。
所述清水箱系统还包括过滤器11和出水泵12,所述过滤器11连接于所述出水口和所述出水泵12之间。本实施例的所述出水泵12优选地选用隔膜泵。
现有的清洁机器人常用的喷洒清水形式是在清水箱后接隔膜泵+球阀的形式,经常会出现由于清水中掺杂杂物,致使泵或者阀损坏的情况,增加了设备后续维修维护的工作量。所述过滤器11可以解决由于清水中杂质对泵或阀的损坏,降低维修、维护工作量,且能延长其使用寿命。
本发明的清水箱系统的工作原理:
引流面D即为所述第一引流管7的下平面,引流面D低于注水口面E,高于注水部液面C;注水部液面C高于上液位面B。
将与补水泵的出口连接的补给水管插进所述注水口21,向所述清水箱体1内注水,清水流到所述注水部2,经过所述遮挡部31、所述缓冲部32进入所述清水箱体1,至与所述凹槽所在的平面(注水部液面C)齐平,补给清水结束。静止状态下,注水部液面C即为所述清水箱内清水最高水平面。此时,所述注水部2没有清水。
当所述清水箱体1内水面降至下液位面A时,触发所述下液位传感器42,从而启动自动补给清水命令,向所述清水箱体1内注水,清水流到所述注水部2,经过所述遮挡缓冲部3进入所述清水箱体1,至上液位面B,补给清水结束。由于液位传感器具有延时性,最终,上液位面即为注水部液面C。此时,所述注水部2没有清水。
清洁机器人在颠簸状态时,所述清水箱体1内的清水会随之剧烈涌动,涌动的清水会首先经过所述遮挡板5。对于涌动的清水而言,所述遮挡板5将极大减弱清水涌动的幅度和冲击的力度。
涌动状况极大减弱的清水流至所述遮挡部31时,绝大部分清水均可被遮挡于所述遮挡部31靠近所述清水箱体1的一侧。少部分流至所述注水部2的清水,此时涌动幅度已经很小,加之水量很小,所以,此部分清水均不能通过所述注水口21流出,且此部分清水可经过所述凹槽、所述缓冲部32流回所述清水箱体1内。
极偶发情况下,所述上液位传感器41延时时间过长,导致注入的清水过多,清水液面超过注水部液面C,直至引流面D,清水会沿所述快插接头9、所述可视水管6、所述第一引流管7、所述第二引流管10流至地面。操作者还可通过观察所述可视水管6内液面高度判断所述清水箱体1内的液位高度。
本发明的清水箱系统适用于含有自动排污水的清洁机器人。
本发明还提供了一种清洁机器人,包括骨架13及所述的清水箱系统,所述清水箱系统设置于所述骨架13上。
本发明的清洁机器人应用场景包括大型商场、机场、工厂、图书馆、火车站、剧院等需大范围清扫的场地。
相对于现有技术,本发明的清水箱系统及清洁机器人通过在注水部2和清水箱体1之间设置遮挡缓冲部3,可以利用遮挡缓冲部3对清水形成缓冲和遮挡,减弱清水涌动的强度和冲击力度,降低清水从注水部2溢出的可能性,且最大限度利用清水箱体1的体积,解决了清水从清水箱体1进入清洁机器人内部的问题;利用液位检测组件4自动检测清水箱体1内的液位情况,从而启动自动补水命令,自动化、智能化程度高。本发明的清水箱系统及清洁机器人具有结构紧凑、布局合理、构思巧妙、缓冲遮挡效果好、防涌动效果好、自动化等特点。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
- 一种清洁机器人污水箱系统及清洁机器人
- 一种清水箱系统及清洁机器人