一种自动集尘不易氧化的扫地机器人系统
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及扫地机器人领域,尤指一种自动集尘不易氧化的扫地机器人系统。
背景技术
随着人们生活水平的不断提高,人们对于生活质量的要求越来越高,但社会人群的压力越来越大,人们都希望能有更多方便生活的家用产品使用来节省自己的精力,提升自己的幸福感,为了迎合人们的需求,便有了家用家用扫地机器人的诞生;
在现有技术中清洁机器人会集成有集尘盒,而且集尘盒会收集滚筒外壁的垃圾,实现了自动对滚筒的清洗。当集尘盒垃圾量满了,也同样需要人工将垃圾箱内的垃圾倒掉;但由于用户一般都是在外出时才启动清洁机器人工作,当垃圾箱垃圾量满,清洁机器人均会停止工作直到用户回来将对应问题处理才能继续工作,故十分影响其清洁效率。
而且现技术中的清洁机器人虽然具备扫地以及拖地的功能,但是现技术的清洁机器人的水箱以及集尘盒是相互独立设置的,故需要同一部机器中同时设置水箱盒以及集成盒两个盒,则占用空间较大,而且生产成本大,清洁起来也比较麻烦。传统的机器人可能将充电对位弹片做在水箱上,易导致装水时,水滴落在充电对位弹片上,在与集尘宝触发弹片接触时,充电时产生火花,对触发弹片以及充电对位弹片产品氧化,导致接触不良。
发明内容
为解决上述问题,本发明提供一种自动集尘不易氧化的扫地机器人系统,实现垃圾的自动回收,为客户解决问题,减少对机器的清理跟垃圾的回收频率,集中一次性清理,故大大提高清洁效率;水尘一体盒一体化的设计可以大大压缩空间,而且制造工艺简单,生产成本更加低,将在充电弹片主机面壳上,正常的添水不如影响到充电对位弹片,故不易接触水渍等。
为实现上述目的,本发明采用的技术方案是:一种自动集尘不易氧化的扫地机器人系统,包括集尘装置、扫地机器人,扫地机器人包括机器人面壳、可拆卸设置在机器人面壳一侧的水尘一体盒,其中机器人面壳内设置有第一控制主板、吸尘组件、机器人驱动组件、充电组件;其中吸尘组件、机器人驱动组件、充电组件分别与第一控制主板电性连接;其中所述充电组件包括锂电池、设置在面壳侧面的一对充电对位弹片;其中水尘一体盒内设置有用于收集灰尘的集尘室以及用于储存清水的清水室,且集尘室与清水室相互独立,水尘一体盒外背面开设有与集尘室连通的进风口以及与集尘室连通的出风口,水尘一体盒的外侧面设置有与集尘室连通的集尘口,水尘一体盒内设置有过滤组件,其中所述吸尘组件与出风口连通;其中所述清水室内设置有水泵、吸水管、出水管、单向阀、输送管,其中单向阀的表面设置有两个与第一控制主板电性连接的检测弹片,其中吸水管的末端设置在清水室的底部并与水泵的输入端连通,且水泵的输出端与单向阀的输入端连通,所述单向阀的输出端通过输送管与出水管连通;所述出水管的另一端延伸至清水室外并与位于水尘一体盒底部的拖地组件连通;所述集尘装置包括集尘壳体、垃圾回收组件、电源组件、第二控制主板,其中垃圾回收组件、电源组件、第二控制主板均内设在集尘壳体内;所述集尘壳体表面设置有与第二控制主板电性连接且数量与充电对位弹片对应的触发弹片;集尘壳体内还设有用于容纳灰尘垃圾的集尘腔体,其中所述垃圾回收组件包括与集尘腔体连通并使得集尘腔体内产生负压的负压装置、与集尘腔体连通的连通组件,所述电源组件分别于与负压装置、第二控制主板电性连接,且所述第二控制主板与负压装置电性连接;所述连通组件包括依次连通的第一导管、硅胶通道、第二导管、橡胶吸口;其中第一导管与集尘腔体连通,所述橡胶吸口延伸至集尘装置外,且所述硅胶通道可沿其轴向压缩形变;其中触发弹片与所述扫地机器人对应的对位弹片接触,且所述集尘装置的橡胶吸口贴合在扫地机器人的集尘口处。
进一步,所述拖地组件包括拖地底座、拖地抹布,拖地底座通过卡扣件可拆卸连接在水尘一体盒底部,其中所述拖地底座的表面设置有与出水管连通的沥水孔,且该沥水孔贯穿拖地底座的表面以及底部;所述拖地抹布贴合在拖地底座的底部并覆盖该沥水孔。
进一步,所述拖地底座的底部边缘处设置有若干魔术贴,拖地抹布通过魔术贴贴合在拖地底座的底部。
进一步,所述充电对位弹片为沿竖直方向延伸,所述触发弹片为沿水平方向延伸。
进一步,所述机器人面壳的顶部还设置有红外线检测模块以及激光雷达,其中红外线检测模块以及激光雷达均与第一控制主板电性连接。
进一步,所述水尘一体盒还包括第一固定轴、第一回位扭簧、第一垃圾挡板,其中第一垃圾挡板通过第一固定轴活动配装在水尘一体盒的集尘口处,且所述所述第一回位扭簧套接在第一固定轴上,并使得第一垃圾挡板可相对转动并实现打开或封闭集尘口。
进一步,所述进风口处还配装有第二固定轴、第二回位扭簧、第二垃圾挡板,其中第二垃圾挡板通过第二固定轴活动配装在进风口处,且所述所述第二回位扭簧套接在第二固定轴上,并使得第二垃圾挡板可相对转动并实现打开或封闭进风口。
本发明的有益效果在于:
1.当扫地机器人水尘一体盒内部灰尘垃圾满时,扫地机器人自动回到集尘装置处,且扫地机器人的集尘口往集尘装置的橡胶吸口移动,当扫地机器人的集尘口与橡胶吸口实现初步的对齐贴合时,扫地机器人继续前行使得推动橡胶通道进行压缩,起到缓冲作用的同时,可以确保橡胶吸口与集尘口之间的贴合更加紧密;而且扫地机器人继续前行会使得扫地机器人的充电对位弹片分别与集尘装置表面的两个触发弹片接触并构成电性回路,即第一控制主板会控制扫地机器人停止工作,同时集尘装置内部的第二控制主板会下发指令并控制负压装置启动,实现对水尘一体盒中集尘盒内垃圾的吸取;故可以在实现自动对扫地机器人内部垃圾的处理,为客户解决问题,减少对机器的清理跟垃圾的回收频率,集中一次性清理,故大大提高清洁效率。
2.在本申请中,由于水尘一体盒将用于收集灰尘垃圾的集尘室以及用于储存清水的清水室集成与一体,首先可以实现了基础的吸尘功能的同时还可以实现给水拖地的功能,而且一体化的设计可以大大压缩空间,而且制造工艺,生产成本更加低,而且用户可以对清水室以及集尘室同时清理更加方便。
3.传统的机器人可能将充电对位弹片做在水箱上,易导致装水时,水滴落在充电对位弹片上,在与集尘宝触发弹片接触时,充电时产生火花,对触发弹片以及充电对位弹片产品氧化,导致接触不良;而在本申请,将在充电弹片主机面壳上,正常的添水不如影响到充电对位弹片,故不易接触水渍等,故充电对位弹片与集尘装置的触发弹片不容易产生氧化物质。
附图说明
图1是本发明中水尘一体盒的结构示意图。
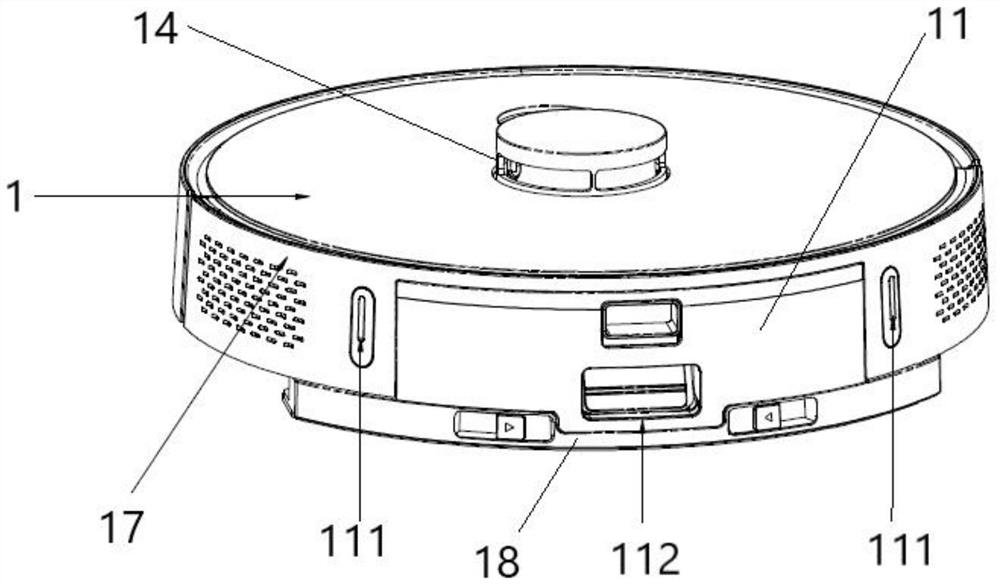
图2是本发明中扫地机器人的立体结构示意图。
图3是本发明中水尘一体盒的结构示意图
图4是本发明中水尘一体盒另一视角的结构示意图。
图5是本发明中水尘一体盒内部的结构示意图。
图6是本发明中水尘一体盒内部另一视角的结构示意图。
图7是本发明中清水室内水泵的工作原理示意图。
图8是本发明中集尘装置纵截面结构示意图。
附图标号说明:1.扫地机器人;11.水尘一体盒;111.充电对位弹片;112.第一垃圾挡板;113.集尘口;114.第一固定轴;115.第一回位扭簧;116.水箱盖;117.密封盖;1171.透气槽;118.垃圾翻盖;1001.集尘室;1002.第二垃圾挡板;1003.进风口;1004.出风口;1005.过滤层;120.清水室;1201.吸水管;1202.水泵;1203.单向阀;1204.检测弹片;1205.出水头;1206.竖直管;1207.水平管;1208.输送管;12.侧边电动毛刷组件;13.驱动轮组件;14.红外线检测组件;15.中扫组件;16.万向轮;17.机器人面壳;18.拖地组件;181.拖地抹布;182.卡扣件;183.拖地底座;2.集尘装置;200.集尘外壳;21.触发弹片;22.橡胶吸口;
具体实施方式
请参阅图1-8所示,本发明关于一种自动集尘不易氧化的扫地机器人系统,包括集尘装置2、扫地机器人1,扫地机器人1包括机器人面壳17、可拆卸设置在机器人面壳17一侧的水尘一体盒11,其中机器人面壳17内设置有第一控制主板、吸尘组件、机器人驱动组件、充电组件;其中吸尘组件、机器人驱动组件、充电组件分别与第一控制主板电性连接;其中所述充电组件包括锂电池、设置在面壳侧面的一对充电对位弹片111;其中水尘一体盒11内设置有用于收集灰尘的集尘室1001以及用于储存清水的清水室120,且集尘室1001与清水室120相互独立,水尘一体盒11外背面开设有与集尘室1001连通的进风口1003以及与集尘室1001连通的出风口1004,水尘一体盒11的外侧面设置有与集尘室1001连通的集尘口113,水尘一体盒11内设置有过滤组件,其中所述吸尘组件与出风口1004连通;
其中所述清水室120内设置有水泵1202、吸水管1201、出水管、单向阀1203、输送管1208,其中单向阀1203的表面设置有两个与第一控制主板电性连接的检测弹片1204,其中吸水管1201的末端设置在清水室120的底部并与水泵1202的输入端连通,且水泵1202的输出端与单向阀1203的输入端连通,所述单向阀1203的输出端通过输送管1208与出水管连通;所述出水管的另一端延伸至清水室120外并与位于水尘一体盒11底部的拖地组件18连通;
所述集尘装置2包括集尘壳体200、垃圾回收组件、电源组件、第二控制主板215,其中垃圾回收组件、电源组件、第二控制主板215均内设在集尘壳体200内;所述集尘壳体200表面设置有与第二控制主板215电性连接且数量与对位弹片111对应的触发弹片21;集尘壳体200内还设有用于容纳灰尘垃圾的集尘腔体212,其中所述垃圾回收组件包括与集尘腔体212连通并使得集尘腔体212内产生负压的负压装置、与集尘腔体212连通的连通组件,所述电源组件分别于与负压装置、第二控制主板215电性连接,且所述第二控制主板215与负压装置电性连接;所述连通组件包括依次连通的第一导管25、硅胶通道24、第二导管23、橡胶吸口22;其中第一导管25与集尘腔体212连通,所述橡胶吸口22延伸至集尘装置2外,且所述硅胶通道24可沿其轴向压缩形变;其中触发弹片21与所述扫地机器人1对应的充电对位弹片111接触,且所述集尘装置2的橡胶吸口22贴合在扫地机器人1的集尘口113处。
当扫地机器人1水尘一体盒11内部灰尘垃圾满时,扫地机器人1自动回到集尘装置2处,且扫地机器人1的集尘口113往集尘装置2的橡胶吸口22移动,当扫地机器人1的集尘口113与橡胶吸口22实现初步的对齐贴合时,扫地机器人1继续前行使得推动橡胶通道进行压缩,起到缓冲作用的同时,可以确保橡胶吸口22与集尘口113之间的贴合更加紧密;而且扫地机器人1继续前行会使得扫地机器人1的充电对位弹片111分别与集尘装置2表面的两个触发弹片21接触并构成电性回路,即第一控制主板会控制扫地机器人1停止工作,同时集尘装置2内部的第二控制主板215会下发指令并控制负压装置启动,实现对水尘一体盒11中集尘盒内垃圾的吸取;故可以在实现自动对扫地机器人1内部垃圾的处理,为客户解决问题,减少对机器的清理跟垃圾的回收频率,集中一次性清理,故大大提高清洁效率。
在本申请中,由于水尘一体盒11将用于收集灰尘垃圾的集尘室1001以及用于储存清水的清水室120集成与一体,首先可以实现了基础的吸尘功能的同时还可以实现给水拖地的功能,而且一体化的设计可以大大压缩空间,而且制造工艺,生产成本更加低,而且用户可以对清水室120以及集尘室1001同时清理更加方便。
传统的机器人可能将充电对位弹片111做在水箱上,易导致装水时,水滴落在充电对位弹片111上,在与集尘装置2的触发弹片21接触时,充电时产生火花,对触发弹片21以及充电对位弹片111产品氧化,导致接触不良;而在本申请,将在充电弹片111设置在机器人面壳17上,正常的添水不如影响到充电对位弹片111,故不易接触水渍等,故充电对位弹片111与集尘装置2的触发弹片21不容易产生氧化物质。
同时在水泵1202工作时,吸水管1201从清水室120吸水,通过水泵1202、单向阀1203、输送管1208道出水管将水喷出拖地;当水从单向阀1203上通过时,两个检测弹片1204与第一控制主板形成回路产生电流,第一控制主板会接收到电流信号;当没有水从单向阀1203上通过时,检测弹片1204与第一控制主板不会形成回路,第一控制主板没有接收到电流信号,则通过后置的报警器会发出报警信号提醒用户水箱没水了;这样子的设计可以保证扫地机器人1在静止时不会漏水;而且可以通过第一控制主板设定的程序控制水泵1202,使得拖地时水量大小可以控制,而且能精确控制出水量。
进一步,所述出水管为“T”字形结构,其中出水管包括沿竖直方向的竖直管1206、沿水平方向的水平管1207,其中竖直管1206的一端与输送管1208连通,竖直管1206的另一端与水平管1207连通,其中水平管1207的底部设置有若干个延伸至清水室120外的出水头1205。其中在本具体实施例中,设置有延伸至清水室120外的个出水头1205,该出水头1205的作用于拖地组件18,并为拖地组件18供水。
进一步,其中水尘一体盒11顶端对应清水室120的位置开设有开口,且该开口处通过螺栓可拆卸连接有水箱盖116,其中水箱盖116的表面开设有与清水室120连通的添水孔,且该添水孔处配装有密封盖117,其中该密封盖117上设置有透气槽1171。即用户可以通过打开密封盖117然后通过添水孔往清水室120加水,而且在密封盖117上设置有透气槽1171,可以实现保持水箱内外气压一致,同时不会出现漏水的情况。而且水箱盖116可拆卸在开口处,即就算有异物进入清水室120也可以拆下水箱盖116进行清理。
同时在本申请中,在其中水尘一体盒11顶端的过滤组件具体包括过滤层1005、垃圾翻盖118,其中垃圾翻盖118通过转轴活动配装在开口处,且过滤层1005可拆卸设置在垃圾翻盖118的底部,而且垃圾翻盖118的背面开设有出风口1004,即正常情况下,扫地机器人1只需要通过集尘装置2就可以清理垃圾,如果遇到停电的情况下,用户可以手动将整个水尘一体盒11拆下,然后打开垃圾翻盖118将垃圾倒出清理即可,而且可以将过滤层1005拆下来清洗。
进一步,所述拖地组件18包括拖地底座183、拖地抹布181,拖地底座183通过卡扣件182可拆卸连接在水尘一体盒11底部,其中所述拖地底座183的表面设置有与出水管连通的沥水孔,且该沥水孔贯穿拖地底座183的表面以及底部;所述拖地抹布181贴合在拖地底座183的底部并覆盖该沥水孔。在本申请中,在水泵1202工作时,吸水管1201从清水室120吸水,通过水泵1202、单向阀1203、输送管1208道出水管将水喷至沥水孔在流到拖地抹布处;当水从单向阀1203上通过时,两个检测弹片1204与第一控制主板形成回路产生电流,第一控制主板会接收到电流信号;当没有水从单向阀1203上通过时,检测弹片1204与第一控制主板不会形成回路,第一控制主板没有接收到电流信号,则通过后置的报警器会发出报警信号提醒用户水箱没水了;这样子的设计可以保证扫地机器人1在静止时不会漏水;而且可以通过第一控制主板设定的程序控制水泵1202,使得拖地时水量大小可以控制,而且能精确控制出水量。
进一步,为了方便用户更换拖地抹布181,在本申请所述拖地底座183的底部边缘处设置有若干魔术贴,拖地抹布181通过魔术贴贴合在拖地底座183的底部,用户只需将拖地抹布181直接从拖地底座183撕下清洗即可。
进一步,故在本申请所述充电对位弹片111为沿竖直方向延伸,所述触发弹片21为沿水平方向延伸,则两者的投影为相互垂直的位置关系,即当扫地机器人1靠近集尘装置2时,可以确保充电对位弹片111与触发弹片21之间可以正常接触的;如果两者都是沿竖直方向延伸或沿水平方向延伸,则会增加两者接触的难度。
进一步,所述机器人面壳17的顶部还设置有红外线检测模块14以及激光雷达,其中红外线检测模块17以及激光雷达均与第一控制主板电性连接。
进一步,所述水尘一体盒11还包括第一固定轴114、第一回位扭簧115、第一垃圾挡板112,其中第一垃圾挡板112通过第一固定轴114活动配装在水尘一体盒11的集尘口113处,且所述所述第一回位扭簧115套接在第一固定轴114上,并使得第一垃圾挡板112可相对转动并实现打开或封闭集尘口113。进一步地,为了防止扫地机器人1在平时工作时,水尘一体盒内灰尘从集尘口113跑出,所述集尘口113铰接有第一垃圾挡板112,且所述第一垃圾挡板112能够相对转动打开或封闭集尘口113。但集尘装置2在吸取水尘一体盒11内垃圾时,负压装置生产强大的吸力,并将第一垃圾挡板112打开,即其气路可以连通;扫地机器人1在平时工作时,第一垃圾挡板112在第一回位扭簧115的作用下会盖合在集尘口113,阻挡灰尘跑出。
进一步,所述进风口1003处还配装有第二固定轴、第二回位扭簧、第二垃圾挡板1002,其中第二垃圾挡板1002通过第二固定轴活动配装在进风口1003处,且所述所述第二回位扭簧套接在第二固定轴上,并使得第二垃圾挡板1002可相对转动并实现打开或封闭进风口1003。由于扫地机器人1内部设置有用于吸附灰尘垃圾的吸尘装置,即可以使得集尘室1001内保持负压状态,则将第二垃圾挡板1002打开,即其气路可以连通;即使得在吸尘装置作用下气流由进风口1003进入集尘室1001内再通过滤组件到达出风口1004完成一次循环,垃圾顺着气流方向从进风口1003进入集尘室1001内完成清扫;扫地机器人1在不工作时,第二垃圾挡板1002在第二回位扭簧的作用下会盖合在进风口1003,阻挡灰尘跑出。
进一步,所述扫地机器人1内部还包括侧边电动毛刷组件12、驱动轮组件13、中扫组件15、万向轮16,其中所述电动毛刷组件设置在扫地机器人1底部边缘处的侧边,驱动轮组件13设置在扫地机器人1底部且驱动扫机机器人前行,所述中扫组件15设置在扫地机器人1底部且将灰尘吸入并输送至水尘一体盒11,所述万向轮16设置在扫地机器人1底部一侧,所述红外线检测组件14设置在扫地机器人1的表面;其中所述侧边电动毛刷组件12、驱动轮组件13、中扫组件15、红外线检测组件14均与第一控制主板电性连接。
以下具体说明本申请的工作原理,包括以下步骤:
1.扫地机器人1通过红外线检测组件14进行扫描,由激光雷达扫码精确定位,检测到集尘装置2的位置,且行驶到距离集尘宝300mm的位置处,转向180°;
2.转向180°后,扫地机器人1驶向集尘装置2,扫地机器人1的集尘口113往集尘装置2的橡胶吸口22移动,当扫地机器人1的集尘口113与橡胶吸口22实现初步的密封贴合;扫地机器人1继续前行使得推动橡胶通道进行压缩,扫地机器人1的充电对位弹片111分别与集尘装置2表面的对应的触发弹片21接触并构成连通回路,即第一控制主板会控制扫地机器人1的吸尘组件停止工作,同时集尘装置2内部的第二控制主板215会下发指令并控制负压装置启动,实现对水尘一体盒11内垃圾的吸取;故可以在实现自动对扫地机器人1内部垃圾的处理。
以上实施方式仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通工程技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明的权利要求书确定的保护范围内。
- 一种自动集尘不易氧化的扫地机器人系统
- 一种自动集尘扫地机器人系统