吸尘器自动调节吸力的方法、检测电路及吸尘器
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及吸尘器技术领域,尤其涉及一种吸尘器自动调节吸力的方法、检测电路及吸尘器。
背景技术
手持无线吸尘器的续航时间直接影响用户的使用体验,目前,市面上很多吸尘器通过增大电池容量来延长吸尘器的续航时间。通过增大电池容量来延长吸尘器的续航时间会导致电池的体积和重量增大,影响用户的使用感受,且会导致吸尘器的制造成本升高。
因此亟需提供一种在不增加电池体积的情况下延长吸尘器续航时间的吸尘器自动调节吸力的方法、检测电路及吸尘器。
发明内容
(一)要解决的技术问题
鉴于现有技术的上述缺点、不足,本发明提供一种吸尘器自动调节吸力的方法、检测电路及吸尘器,其解决了现有的手持无线吸尘器续航时间短的技术问题。
(二)技术方案
为了达到上述目的,本发明采用的主要技术方案包括:
第一方面,本发明实施例提供一种吸尘器自动调节吸力的方法,所述吸尘器的内部设置有抽吸电机,其中,所述吸尘器自动调节吸力的方法包括:
在所述吸尘器的控制模块处于自动档位模式时,启动吸尘管道区域的发光模块发出光信号,吸尘管道区域的信号检测模块检测光信号并输出电平信号;
所述控制模块接收信号检测模块基于光信号反馈的电平信号;
所述控制模块判断预设时间段内接收的所述电平信号的变化次数是否大于第一预设阈值;
若所述预设时间段内所述电平信号的变化次数大于第一预设阈值,则所述控制模块控制所述吸尘器的抽吸电机处于灰尘模式;
若所述预设时间段内所述电平信号的变化次数小于第一预设阈值,则所述控制模块控制所述吸尘器的抽吸电机处于非灰尘模式。
可选地,还包括:
在所述控制模块处于自动挡位模式时,所述抽吸电机的初始状态为非灰尘模式,
并且,在所述控制模块处于自动挡位模式时,一个所述预设时间段结束后所述控制模块继续判断另一个所述预设时间段内所述电平信号的变化次数,直至所述控制模块结束所述自动挡位模式。
可选地,还包括:
在所述抽吸电机处于灰尘模式的情况下,若所述预设时间段内所述电平信号的变化次数等于所述第一预设阈值,所述抽吸电机调整至所述非灰尘模式;
在所述抽吸电机处于非灰尘模式的情况下,若所述预设时间段内所述电平信号的变化次数等于所述第一预设阈值,所述抽吸电机调整至所述灰尘模式。
第二方面,本发明实施例提供一种用于吸尘器吸力调节的检测电路,包括:
设置在吸尘器风道区域第一侧的发光模块、设置在吸尘器道风区域第二侧的信号检测模块,所述信号检测模块与所述吸尘器的控制模块连接;
所述发光模块用于在吸尘器处于自动档位模式时向吸尘管道的吸尘管道区域发出光信号;
所述信号检测模块用于接收风道区域的光信号,并输出电平信号,所述电平信号用于反馈所述风道区域是否存在灰尘颗粒信息的信号;
若风道区域存在灰尘颗粒信号,信号检测模块向控制模块输出低电平信号,否则输出高电平。
可选地,所述发光模块包括:
LED发射二极管,所述LED发射二极管发射红外光信号。
可选地,所述信号检测模块包括:用于接收光信号并转换为电信号的信号接收单元、用于对转换的电信号进行放大处理的信号处理单元,将放大的信号和预设信号进行比较的比较单元;
所述信号接收单元包括:LED光感应器,所述LED光感应器的发射极接地,集电极通过第二电阻接电源;
所述信号处理单元包括:第一运算放大器,所述第一运算放大器的负向输入端通过第一电容接入所述LED光感应器的集电极,所述第一运算放大器的正向输入端通过第四电阻接地,
所述第一运算放大器的输出端通过RC电路连接负向输入端,
所述第一运算放大器的正向输入端还通过第三电阻接电源;
所述第一运算放大器的电源负极接地,电源正极接电源;
所述比较单元包括:第二运算放大器,所述第二运算放大器的正向输入端连接所述第一运算放大器的输出端;
所述第二运算放大器的负向输入端一分支通过第六电阻接地,另一分支通过第五电阻接电源;
所述第二运算放大器的输出端作为信号检测模块的输出。第三方面,本发明实施例提供一种吸尘器,包括:控制模块和上述的用于吸尘器吸力调节的检测电路;
所述检测电路中的信号检测模块连接所述控制模块。
可选地,所述吸尘器为手持无线吸尘器,包括吸尘器主体、尘杯、旋风分离单元以及吸尘管道,所述尘杯内设置有旋风分离单元,所述吸尘管道的出气端与所述尘杯的进气口连接,所述发光模块和所述信号检测模块设置在所述吸尘管道与所述尘杯连接位置处的风道内壁上。
可选地,所述手持无线吸尘器还包括地刷,所述地刷包括滚刷和驱动所述滚刷绕其中心轴线旋转的滚刷电机,所述滚刷电机的初始转速为第一转速;
所述控制模块还接收滚刷电机负载检测模块反馈的检测信号;
所述控制模块根据所述检测信号判断所述滚刷电机工作状态,并根据所述工作状态控制所述滚刷电机的转速;
其中,在所述滚刷电机的转速为第一转速的情况下,若所述滚刷电机的负载大于第二预设阈值,且大于第二预设阈值的滚刷电机负载持续时间大于或等于第一预设时间,所述控制模块调节所述滚刷电机转速为第二转速;
其中,在所述滚刷电机的转速为第二转速的情况下,若所述滚刷电机的负载小于第三预设阈值,且小于第三预设阈值的滚刷电机负载负载持续时间大于或等于第二预设时间,所述控制模块调节所述滚刷电机转速为第一转速。
可选地,所述吸尘器还包括过流保护模块,所述过流保护模块根据所述滚刷电机的电流选择是否向所述滚刷电机发出停机指令;
若所述滚刷电机的电流大于第四预设阈值,且大于第四预设阈值的滚刷电机的电流持续时间大于第三预设时间,则向所述滚刷电机发出停机指令;
若所述滚刷电机的电流大于第五预设阈值,且大于第五预设阈值的滚刷电机的电流持续时间大于第四预设时间,则向所述滚刷电机发出停机指令;
其中,所述第五预设阈值大于所述第四预设阈值,所述第四预设时间小于所述第三预设时间。
(三)有益效果
本发明的有益效果是:
本发明的吸尘器自动调节吸力的方法,由于采用控制模块能够根据信号检测模块输出的电信号及时调节抽吸电机的吸力,当地面上无灰时,抽吸电机切换至低功率的非灰尘模式,相对于现有技术而言,其能够在无需增加电池体积的前提下,较好地提高电池的续航能力,方便用户使用。
本发明的用于吸尘器吸力调节的检测电路,由于采用控制模块、发光模块和信号检测模块检测,相对于现有技术相言,其能够实现吸尘器吸力自动调节,当地面上无灰时,抽吸电机切换至低功率的非灰尘模式,有效延长手持无线吸尘器的续航时间。
本发明的吸尘器,还由于采用控制模块和滚刷电机负载检测模块,相对于现有技术而言,其可以根据滚刷电机的负载自动调节滚刷电机的转速,在无需增加电池体积的前提下,就可以有效延长手持无线吸尘器的续航时间,改善手持无线吸尘器的清洁效果。
附图说明
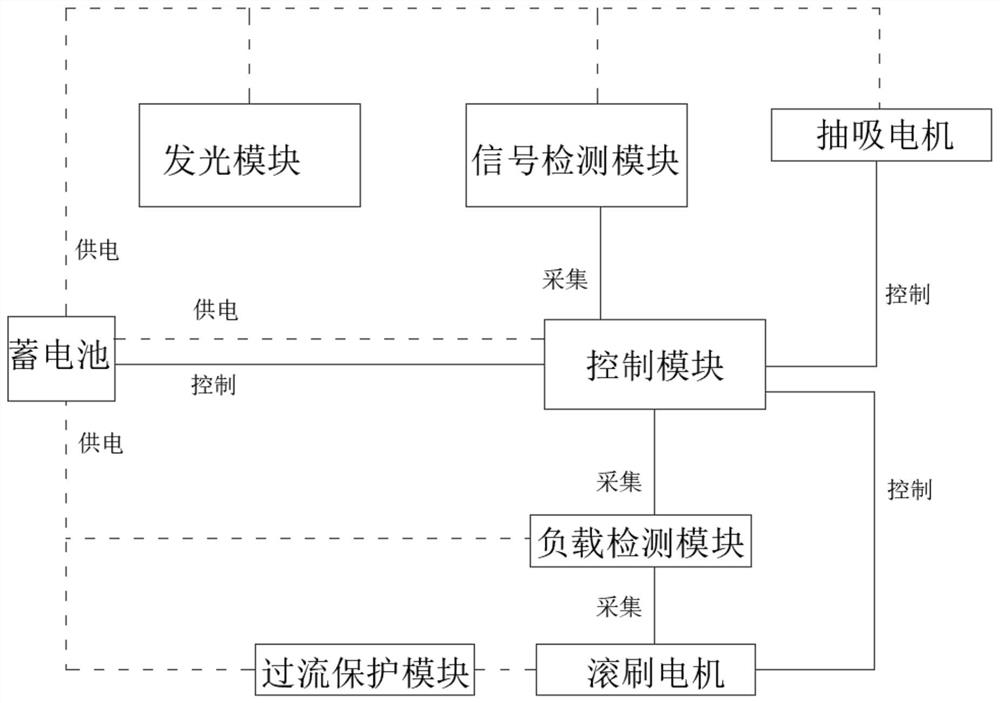
图1为本发明的手持无线吸尘器的结构框图;
图2为本发明的用于吸尘器吸力调节的检测电路的电路图;
图3为本发明的手持无线吸尘器的吸尘器主体的剖视示意图;
图4为本发明的手持无线吸尘器的吸尘器主体的立体示意图,其中吸尘器主体未安装尘杯和抽吸电机;
图5为本发明的手持无线吸尘器的吸尘器主体另一视角下的立体示意图,其中吸尘器主体未安装尘杯和抽吸电机。
【附图标记说明】
1:吸尘器主体;2:尘杯;3:旋风分离单元;4:吸尘管道;5;发光模块;6:信号检测模块;7:蓄电池;8:手柄;9:抽吸电机;R1:第一电阻;R2:第二电阻;RQ1:第三电阻;RQ2:第四电阻;RQ3:第五电阻;RQ4:第六电阻;Rf:第七电阻;Rout:第八电阻;ICIA:第一运算放大器;ICIB:第二运算放大器;Cin:第一电容;Cf:第二电容;C1:第三电容。
具体实施方式
为了更好的解释本发明,以便于理解,下面结合附图,通过具体实施方式,对本发明作详细描述。
实施例一
参照图1,本实施例提供一种吸尘器自动调节吸力的方法,所述吸尘器的内部设置有抽吸电机,所述吸尘器自动调节吸力的方法包括:
在所述吸尘器的控制模块处于自动档位模式时,启动吸尘管道区域的发光模块发出光信号,吸尘管道区域的信号检测模块检测光信号并输出电平信号;
所述控制模块接收信号检测模块基于光信号反馈的电平信号;
所述控制模块判断预设时间段内接收的所述电平信号的变化次数是否大于第一预设阈值;
若所述预设时间段内所述电平信号的变化次数大于第一预设阈值,,则所述控制模块控制所述吸尘器的抽吸电机处于灰尘模式;
若所述预设时间段内所述电平信号的变化次数小于第一预设阈值,则所述控制模块控制所述吸尘器的抽吸电机处于非灰尘模式。
在所述控制模块处于自动挡位模式时,所述抽吸电机的初始状态可根据实际情况进行适当的选择,优选为,抽吸电机在初始状态为非灰尘模式,节约电能。并且,在所述控制模块处于自动挡位模式时,一个所述预设时间段结束后所述控制模块继续判断另一个所述预设时间段内所述电平信号的变化次数,控制模块以所述预设时间段为循环单元,不断检测电平信号的变化次数,直至所述控制模块结束所述自动挡位模式。
在所述抽吸电机处于灰尘模式的情况下,若所述预设时间段内所述电平信号的变化次数等于所述第一预设阈值,所述抽吸电机调整至所述非灰尘模式;在所述抽吸电机处于非灰尘模式的情况下,若所述预设时间段内所述电平信号的变化次数等于所述第一预设阈值,所述抽吸电机调整至所述灰尘模式。
所述抽吸电机具有非灰尘模式和灰尘模式,抽吸电机在非灰尘模式时的吸力小于在灰尘模式时的吸力,故抽吸电机在非灰尘模式时功耗低,其更加省电,能够延长手持无线吸尘器的续航时间。第一预设阈值可以是1次、2次、3次……10次等,预设时间段可以为2秒钟、3秒钟、4秒钟等。
假如第一预设阈值为1次,预设时间段为2秒钟:红外检测时,若吸尘器处在非灰尘模式,只要控制模块检测到检测电路输出的信号变化大于1次,吸尘器就进入灰尘模式,灰尘模式持续预设时间段为2秒钟,在这2秒钟内如果再次检测到红外信号变化大于1次,那么这预设时间段2秒钟重新开始计时,直到预设时间段2秒内都未检测到红外信号变化,那么退回非灰尘模式。
假如第一预设阈值为10次,预设时间段为2秒钟:红外检测时,若吸尘器处在非灰尘模式,控制模块开启一个2秒钟的定时器,当在这个2秒钟内,控制模块检测到检测电路输出的信号变化次数大于或等于10次,吸尘器就进入灰尘模式。在灰尘模式下,控制设备开启另一个2秒钟的定时器,如果2秒钟时间到达,控制设备检测到传感器输出的信号变化次数大于10次,那么继续保持灰尘模式,直到预设时间段为2秒钟内检测到的信号变化次数小于或等于10次,退回非灰尘模式。本发明的吸尘器自动调节吸力的方法,由于采用控制模块能够根据信号检测模块输出的电信号及时调节抽吸电机的吸力,当地面上无灰时,抽吸电机切换至低功率的非灰尘模式,相对于现有技术而言,其能够在无需增加电池体积的前提下,较好地提高电池的续航能力,方便用户使用。
实施例二
参照图2,本实施例提供一种用于吸尘器吸力调节的检测电路,包括:
设置在吸尘器风道区域第一侧的发光模块5、设置在吸尘器风道区域第二侧的信号检测模块6,所述信号检测模块6与所述吸尘器的控制模块连接;
所述发光模块5用于在吸尘器处于自动档位模式时向吸尘管道区域发出光信号;
所述信号检测模块6用于接收风道区域的光信号,并输出电平信号,所述电平信号用于反馈所述风道区域是否存在灰尘颗粒信息的信号;
若风道区域存在灰尘颗粒信号,信号检测模块6向控制模块输出低电平信号,否则输出高电平。
所述发光模块包括:
LED发射二极管,所述LED发射二极管发射红外光信号,所述LED发射二极管的负极接地,正极通过第一电阻R1接电源,电源电压优选为+3.3V。
所述信号检测模块6包括:用于接收光信号并转换为电信号的信号接收单元、用于对转换的电信号进行放大处理的信号处理单元,将放大的信号和预设信号进行比较的比较单元;
所述信号接收单元包括:LED光感应器,所述LED光感应器的发射极接地,集电极通过第二电阻R2接电源,电源电压优选为+3.3V;
所述信号处理单元包括:第一运算放大器ICIA,所述第一运算放大器ICIA的负向输入端16通过第一电容Cin接入所述LED光感应器的集电极,所述第一运算放大器ICIA的正向输入端17通过第四电阻RQ2接地,
所述第一运算放大器ICIA的输出端15通过RC电路连接负向输入端16,RC电路包括第七电阻Rf和第二电容Cf,构成RC串联电路。
所述第一运算放大器ICIA的正向输入端17还通过第三电阻RQ1接电源,电源电压优选为+3.3V;
所述第一运算放大器ICIA的电源负极10接地,电源正极14一分支接电源,电源电压优选为+3.3V,另一分支通过第三电容C1接地;
所述比较单元包括:第二运算放大器ICIB,所述第二运算放大器ICIB的正向输入端11连接所述第一运算放大器ICIA的输出端15;
所述第二运算放大器ICIB的负向输入端12一分支通过第六电阻RQ4接地,另一分支通过第五电阻RQ3接电源,电源电压优选为+3.3V;
所述第二运算放大器ICIB的输出端13连接第八电阻Rout的一端,所述第八电阻Rout的另一端作为信号检测模块的输出。
第三电阻RQ1的端点电压可根据使用需求进行适当的选择,例如,1.50-1.80V。
可选地,第五电阻RQ3的端点电压为第三电阻RQ1的端点电压的一半。可选地,第一电容Cin=1uf。
所述检测电路的工作原理如下:
所述信号接收单元的输出端设有第一信号点Vi,所述第一放大器IC1A的正向输入端17处设置有第二信号点Vq1,所述第二放大器IC1B的反向输入端12处设置有第三信号点Vq2,所述第一放大器IC1A的输出端15处设置有第四信号点Vo1。
第一运算放大器IC1A与第一电容Cin、第七电阻Rf、第二电容Cf、第四电阻RQ2、第三电阻RQ1构成一个微分运算电路,根据电路回路电流方程①:Vo1+Rf*Cf*(dVo/dt)=Vq1-Rf*Cin*(dVi/dt)。
在实际工程应用中Vq1=1.65V,Vq2=0.76V,Cf=30pf,Rf=200KΩ,Cin=1uf因Cf为30pf数量级很小,此处公式可以简化为:
Vo1=Vq1-Rf*Cin*(dVi/dt)
0.76V=1.65V-(200000*0.000001*dVi/dt)
dVi/dt=(1.65-0.76)/0.2=4.45
即当输出信号变化量大于4.45,Vi信号处于上升,且斜率大于4.45时,VO1<0.76V。比如在100mS内Vi由0.1V上升到0.6V,则dVi/dt=0.5/0.1=5,就会触发比较单元,灰尘被检测到一次。
注:Vq1选择使用1.50-1.80V,例如1.50V、1.65V或者1.80V。
1、第一运算放大器IC1A的供电电压是3.3V。原因在于,Vq1设置在运放工作区的中点位置,Vi没有信号变化时,Vo1=1.65V,当Vi有信号波动时Vo1将在1.65V上下波动,输出信号可高于1.65V也可低于1.65V,即:输出信号的交流分量将会驼载在1.65V上下浮动,可以等幅的获得交流分量信号。
2、另外1.65V是运放的中点工作区域,这个区域运放的线性度较好。Vq2选择使用0.76V,原因在于,Vq2按照设计原理,首先应该低于1.65V,由于微分电路对干扰信号比较敏感,Vi有小干扰信号的进入,Vo1将会产生波动,为了不误触发第一运算放大器IC1B,Vq2设置小于(1.65V/2)。
第二运算放大器IC1B与第五电阻RQ3、第六电阻RQ4构成比较器,当Vo1大于Vq2,PT+将输出高电平,当Vo1小于Vq2,触发第二运算放大器IC1B,灰尘被检测到一次,PT+向控制模块输出低电平一次。
在自动档位模式下,LED发射二极管发射光信号,LED光感应器接收信号,当有灰尘颗粒经过吸尘管道时,LED发射二极管的光线将在一定时间内被遮挡。这将引起Vi的信号变化,根据方程①,Vi变化后,(dVi/dt)就是Vi信号的微分,即是在这段时间内电压的变化率,从宏观上来看,灰尘颗粒经过吸尘管道中的检测电路,时间是很短暂的。那么(dVi/dt)将会是一个可观的“大信号”。同时Vq1-Rf*Cin*(dVi/dt)将会跟着变化,导致Vo1跟着变化,触发后面比较单元(电压比较器)信号变化,从而触发控制模块向抽吸电机发送调节信号,实现吸力自动调节。
本发明的用于吸尘器吸力调节的检测电路,由于采用控制模块、发光模块和信号检测模块检测,相对于现有技术相言,其能够实现吸尘器吸力自动调节,当地面上无灰时,抽吸电机切换至低功率的非灰尘模式,有效延长手持无线吸尘器的续航时间。
实施例三
参照图3、图4和图5,本实施例提供一种吸尘器,包括控制模块和实施例二中的用于吸尘器吸力调节的检测电路;
所述检测电路中的信号检测模块连接所述控制模块。
所述吸尘器为手持无线吸尘器,包括吸尘器主体1、尘杯2、旋风分离单元3、吸尘管道4以及地刷,所述吸尘管道4的进气端与所述地刷连通,所述吸尘器主体1的内部设置有所述尘杯2,所述尘杯2内设置有旋风分离单元3,所述吸尘管道4的出气端与所述尘杯2的进气口连通,所述发光模块5和所述信号检测模块6设置在所述吸尘管道4与所述尘杯2连接位置处的风道内壁上。发光模块5和信号检测模块6直接邻近尘杯2的入口布置,使得控制模块能够准确掌控进入尘杯2内的灰尘浓度情况,减小误差,有助于控制模块准确控制抽吸电机的抽吸效率,进而提高吸尘器的清洁效率,改善用户使用体验。
所述手持无线吸尘器还包括地刷,所述地刷包括滚刷和驱动所述滚刷绕其中心轴线旋转的滚刷电机,所述滚刷电机的初始转速为第一转速;
所述控制模块还接收滚刷电机负载检测模块反馈的检测信号;
所述控制模块根据所述检测信号判断所述滚刷电机工作状态,并根据所述工作状态控制所述滚刷电机的转速;
其中,在所述滚刷电机的转速为第一转速的情况下,若所述滚刷电机的负载大于第二预设阈值,且大于第二预设阈值的滚刷电机负载持续时间大于或等于第一预设时间,所述控制模块调节所述滚刷电机转速为第二转速;
其中,在所述滚刷电机的转速为第二转速的情况下,若所述滚刷电机的负载小于第三预设阈值,且小于第三预设阈值的滚刷电机负载持续时间大于或等于第二预设时间,所述控制模块调节所述滚刷电机转速为第一转速。
上述调节方式可使得滚刷电机根据待清洁表面的清洁需求灵活调整转速,例如,在待清洁表面为地板时,滚刷电机清洁负载较小,处于第一转速;在待清洁表面为地毯时,滚刷电机清洁负载较大,处于第二转速。地刷通过控制模块和负载检测模块,判断滚刷电机的负载,实现滚刷电机的转速的自动调节,节省电量延长电池的续航时间。
进一步地,所述吸尘器还包括:与所述滚刷电机串联的过流保护模块,所述过流保护模块根据所述滚刷电机的电流选择是否向所述滚刷电机发出停机指令;
若所述滚刷电机的电流大于第四预设阈值,且大于第四预设阈值的滚刷电机的电流持续时间大于第三预设时间,则向所述滚刷电机发出停机指令;
若所述滚刷电机的电流大于第五预设阈值,且大于第五预设阈值的滚刷电机的电流持续时间大于第四预设时间,则向所述滚刷电机发出停机指令;
其中,所述第五预设阈值大于所述第四预设阈值,所述第四预设时间小于所述第三预设时间。
一旦吸尘器滚刷电机的电流超出第四预设阈值且滚刷电机的电流超出第四预设阈值的持续时间大于第三预设时间,或者滚刷电机的电流超出第五预设阈值且滚刷电机的电流超出第五预设阈值的持续时间大于第四预设时间,则触发过流保护模块,所述过流保护模块控制滚刷电机停机,且在手持无线吸尘器的显示屏上提示用户“滚刷缠绕”,提醒用户清理滚刷。过流保护模块对于不同的工作环境的第四预设阈值和第三预设时间、第五预设阈值和第四预设时间可根据实际需要进行适当的选择。本发明中所公开的一种具体实施方式中,第四预设阈值和第三预设时间、第五预设阈值和第四预设时间如下表:
其中,在滚刷电机处于第一转速的情况下,第四预设阈值为4.0A,第三预设时间为1.5秒,第五预设阈值6.0A,第四预设时间0.5秒;在滚刷电机处于第二转速的情况下,第四预设阈值为8.0A,第三预设时间为1.5秒,第五预设阈值10.0A,第四预设时间0.5秒。
所述吸尘器主体包括手柄8和蓄电池7,所述抽吸电机9和所述蓄电7池分别设置于所述手柄8的相对两端处,外部供电的蓄电池7与各用电器件相连接,并将电压转化成各用电器件可使用的电压,用以向各用电器件供电。手柄8优选为弧形手柄,有助于提高用户抓握的舒适度,且便于手柄8注塑成型,改善注塑质量。弧形手柄的弧度可根据实际需要进行适当的选择,其中,为了兼顾产品外观和抓握舒适度,弧形手柄的弧形轮廓可选自直径为1.5米至3米的圆弧段,使得弧形手柄为微弧形手柄。
所述手持机体上还设置有与所述控制模块电连接的显示屏,用于显示所述手持无线吸尘器的工作状态。
本发明的吸尘器,还由于采用控制模块和滚刷电机负载检测模块,相对于现有技术而言,其可以根据滚刷电机的负载自动调节滚刷电机的转速,在无需增加电池体积的前提下,就可以有效延长手持无线吸尘器的续航时间,改善手持无线吸尘器的清洁效果。
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行改动、修改、替换和变型。
- 吸尘器自动调节吸力的方法、检测电路及吸尘器
- 一种吸尘器的吸力自动调节方法及系统