一种隧道巡检及消防机器人业务的处理方法及装置
文献发布时间:2023-06-19 11:42:32
技术领域
本申请涉及机器人控制技术领域,尤其涉及一种隧道巡检及消防机器人业务的处理方法及装置。
背景技术
近年来,随着人工智能的发展,军用机器人、扫雷机器人、排爆机器人等危险工作机器人越来越多,消防机器人是机器人的一个新兴领域,具有危险作业机器人的特点。
在世界各地,由于各种突发事故,隧道灾难经常发生,在灾难救援中,救援人员只有约48小时的救援时间用于在着火点隧道或倒塌的隧道内找寻生还者,在这种危险情况下,能够自主智能进行隧道巡检,并且对隧道灾害进行营救,是一个富有挑战性的领域,然而现在对于开发隧道救援机器人的研究还很少多数仅对其中一项功能开展研究。
申请内容
本申请提供了一种隧道巡检及消防机器人业务的处理方法及装置,使得利用神经网络模型对隧道内物体进行类别判定,消防机器人能够及时发现被困人员,及时通报,加快救援进程;还可以根据物体类别,具有针对性地开展灭火、清理工作,节约搜索、灭火成本,具有实用性。
有鉴于此,本申请第一方面提供了一种隧道巡检及消防机器人业务的处理方法,所述方法包括:
采集隧道内的环境信息;
将所述环境信息与火源判定条件进行比对,判断隧道内是否出现火源;
若出现火源,则将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;
根据物体的所述识别结果采取对应灭火措施,并发送警报信息至远程控制台。
可选的,在所述若出现火源,则将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果,之前还包括:
采用大量的不同种类的物体的图像样本作为数据集,用于训练构建好的所述物体识别模型。
可选的,所述采集隧道内的环境信息,包括:
采用图像采集装置,温度/烟雾/光感传感器采集隧道内的图像数据以及温度/烟雾浓度数据。
可选的,所述将所述环境信息与火源判定条件进行比对,判断隧道内是否出现火源,包括:
将采集到的温度、亮度以及烟雾浓度分别与预置的所述火源判定条件进行比对,若温度、亮度以及烟雾浓度达到预置的所述火源判定条件,则隧道内出现火源;否则没有出现火源。
可选的,还包括:
若没有出现火源,则将获取的周围环境的图片输入到训练好的物体识别模型中,输出物体的识别结果;
根据物体的所述识别结果,对物体进行清理,或者绕开物体继续巡逻。
本申请第二方面提供一种隧道巡检及消防机器人业务的处理装置,所述装置包括:
采集单元,用于采集隧道内的环境信息;
判断单元,用于将所述环境信息与火源判定条件进行比对,判断隧道内是否出现火源;
第一识别单元,用于当出现火源时,将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;
灭火单元,用于根据物体的所述识别结果采取对应灭火措施,并发送警报信息至远程控制台。
可选的,还包括:
训练单元,用于采用大量的不同种类的物体的图像样本作为数据集,用于训练构建好的所述物体识别模型。
可选的,判断单元具体用于将采集到的温度、亮度以及烟雾浓度分别与预置的所述火源判定条件进行比对,若温度、亮度以及烟雾浓度达到预置的所述火源判定条件,则隧道内出现火源;否则没有出现火源。
可选的,还包括:
第二识别单元,用于当没有出现火源时,将获取的周围环境的图片输入到训练好的物体识别模型中,输出物体的识别结果;
根据物体的所述识别结果,对物体进行清理,或者绕开物体继续巡逻。
本申请第三方面提供一种隧道巡检及消防机器人,包括信息采集模块,分析识别模块,灭火模块以及通信模块;
所述信息采集模块用于采集隧道内的环境信息;
分析识别模块用于对所述环境信息进行分析,判断周围环境是否存在火源,识别周围环境中的物体;
灭火模块用于根据着火物体采取对应的灭火措施;
通信模块用于将所述环境信息以及分析结果传输至远程控制台,并执行远程控制台下发的指令。
从以上技术方案可以看出,本申请具有以下优点:
本申请中,提供了一种隧道巡检及消防机器人业务的处理方法,包括:采集隧道内的环境信息;将环境信息与火源判定条件进行比对,判断隧道内是否出现火源;若出现火源,则将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;根据物体的识别结果采取对应灭火措施,并发送警报信息至远程控制台。
本申请利用神经网络模型对隧道内物体进行类别判定,使得能够及时发现被困人员,及时通报,加快救援进程;还可以根据物体类别,具有针对性地开展灭火、清理工作,节约搜索、灭火成本,具有实用性。
附图说明
图1为本申请一种隧道巡检及消防机器人业务的处理方法的一个实施例的方法流程图;
图2为本申请一种隧道巡检及消防机器人业务的处理方法的另一个实施例的方法流程图;
图3为本申请一种隧道巡检及消防机器人业务的处理装置的一个实施例的装置结构。
图4为本申请一种隧道巡检及消防机器人的一个实施例的简易结构示意图。
具体实施方式
为了使本技术领域的人员更好地理解本申请方案,下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
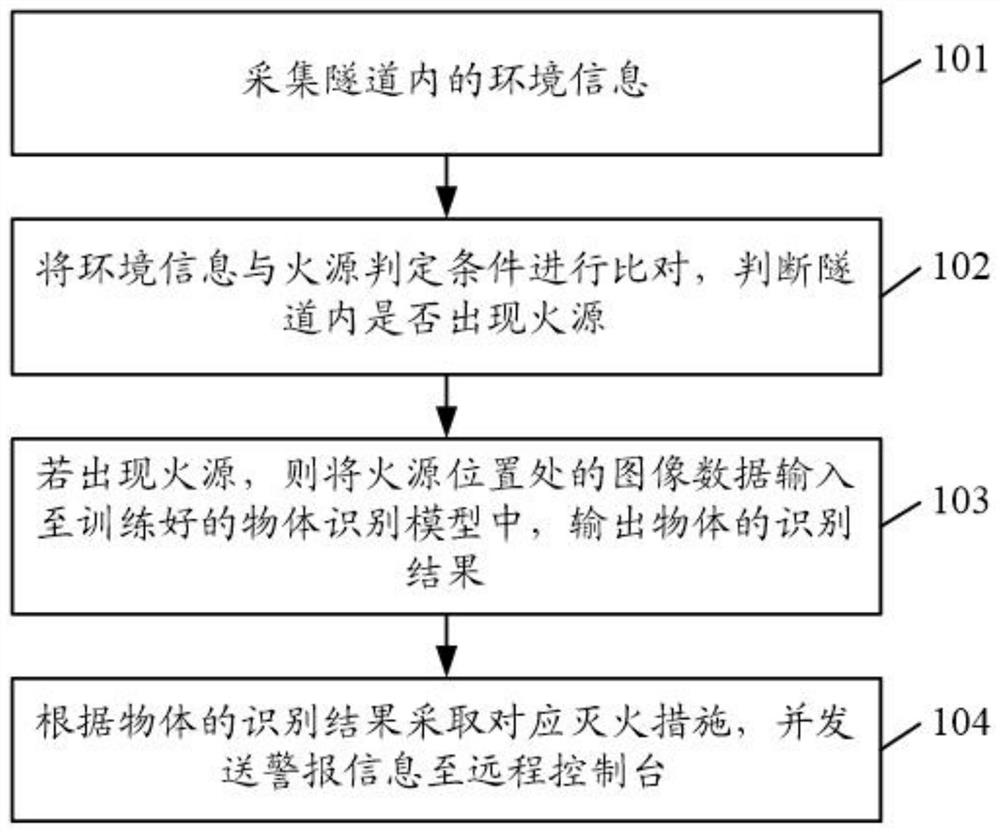
图1为本申请一种隧道巡检及消防机器人业务的处理方法的一个实施例的方法流程图,如图1所示,图1中包括:
101、采集隧道内的环境信息;
需要说明的是,本申请中可以利用摄像头、温度传感器、光感传感器以及烟雾传感器等设备,采集隧道内的烟雾浓度、温度、亮度以及周围环境的图像数据,并可利用高速移动网络例如5G通信技术,将采集到的环境信息传输至远程操作台,使得工作人员可以根据当前环境信息实时查看隧道情况。
102、将环境信息与火源判定条件进行比对,判断隧道内是否出现火源;
需要说明的是,通过环境信息判断周围有无火源包括,可以环境信息与火源判定条件进行比对,判断隧道内是否出现火源。具体的,当隧道中的温度达到60°、烟雾浓度达到15%OBS/M时,可以判断为有火源,并向操作台传输报警信号,并将摄像头转向亮光处,便于工作人员查看火情。以上的火源判定条件仅为示例性说明,具体可以根据实际需要进行设置。
103、若出现火源,则将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;
需要说明的是,若出现火源,则根据光感传感器的识别结果将摄像头转向至火源处,并采集火源处的图像,将采集的图像输入至训练好的物体识别模型中,输出物体的识别结果,用来判断具体是什么物体着火。
104、根据物体的所述识别结果采取对应灭火措施,并发送警报信息至远程控制台。
需要说明的是,当识别结果显示火源物体为人或金属时,则消防机器人可以立即使用水基型喷剂进行灭火;若火源处为布料,则使用水进行灭火;若为其他类别物体,则将火源画面传输至操作台,由工作人员选取灭火材料,进行灭火。当检测到周围环境中出现人且消防机器人难以救治时,则可以发送警报信息至远程控制台,通知工作人员准备救援,以便消防人员进行及时救援。
本申请还提供了一种隧道巡检及消防机器人业务的处理方法的另外一个实施例,如图2所示,图2中包括:
201、采用图像采集装置,温度/烟雾/光感传感器采集隧道内的图像数据以及温度/烟雾浓度数据;
202、将采集到的温度、亮度以及烟雾浓度分别与预置的火源判定条件进行比对,若温度、亮度以及烟雾浓度达到预置的火源判定条件,则隧道内出现火源;否则没有出现火源;
203、采用大量的不同种类的物体的图像样本作为数据集,用于训练构建好的物体识别模型;
需要说明的是,本申请可以采用大量隧道中常见物体的图像以及人的图像作为训练集,用于训练物体识别模型,得到训练好的物体识别模型。
具体的,隧道内常见物体类型包括:纺织品、金属以及其他可能会出现的物体;本申请可以采用神经网络模型构建物体识别模型。其训练过程包括:选取3类(纺织品、金属和人)图片作为数据集对物体识别模型进行训练,具体的一共准备3000张图片进行训练,其中训练集2400张,每类800张,测试集600张,每类200张,首先将图片处理成为同样大小为128×128的单通道灰度图像,将图片的维度设定为(n,128,128,2),将构建的物体识别模型进行训练,选取的损失函数为:
L(α
其中反向传播函数为:
最优值为:
其中:α
204、若出现火源,则将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;
205、根据物体的识别结果采取对应灭火措施,并发送警报信息至远程控制台。
206、若没有出现火源,则将获取的周围环境的图片输入到训练好的物体识别模型中,输出物体的识别结果;根据物体的识别结果,对物体进行清理,或者绕开物体继续巡逻。
需要说明的是,若没有火源时,则可以对隧道内的物体进行识别以及分类后,若物体为纺织物,消防机器人利用机械手将物品进行清除,若为金属物,则改变行驶路线进行躲避,若为其他物体,则由工作人员选择操作动作。
本申请还提供了一种隧道巡检及消防机器人业务的处理方法的试验对比结果,具体为:
为了验证本申请的有益效果,搭建一个隧道消防控制平台对两种机器人进行测试,利用仿真软件构建一个长为1km的隧道,在隧道内随机位置分布3种火情,并且在隧道内放置各种衣物、金属块等杂物,将两种不同的机器人分别在隧道中进行消防测试,每种方法各测试100次,并且在测试过程中隧道内分布的火情位置会随机改变,其测试的平均结果如下表1所示:
表1:消防测试实验结果
可以看出,在进行一般的灭火工作时,本申请方法通过火源判定,选择针对性的灭火方式,与传统自主作业消防机器人相比,其所消耗的灭火时间差距不大,但是由于传统机器人无法对火源情况进行分辨,为了应对不同火源情况,仅能使用较贵的灭火试剂,而本申请方法在进行灭火时,可以针对情况选取各种合适的灭火试剂,在很大程度上缩减了消防的成本,另一方面本申请还可以根据火源情况对隧道内的着火信息进行分析,利于后续火灾预防的工作开展,并且本申请还可以通过机械手,对隧道内的各种杂物进行清理,为后续工作提供便利。
另一方面,本申请除了在一般灭火工作的情况下,对于隧道坍塌、起火等灾害中,本申请消防机器人根据摄像头拍到的影像,利用物体识别模型进行图像识别,寻找隧道被困人员,为了验证本申请的有益效果,与传统摆臂救援机器人进行对比,传统摆臂机器人通过声波传感器对信号进行处理,进而判断前方物体,利用MATLB软件搭建一个救援平台,在长1km的隧道内模拟1名被困人员,利用两种机器人进行救援提示,其结果如下表2所示:
表2:救援对比实验结果
通过表2可以看出,虽然传统的摆臂机器人可以在较远的地方发现隧道内物体,但是无法判定物体属性,并不能达到快速救援的目的,而本申请方法利用神经网络进行图像识别时,可以在较远的位置,更快得发现隧道内的被困人员,并对救援人员进行报警,加快救援进程。
以上是本申请的一种隧道巡检及消防机器人业务的处理方法的实施例,本申请还提供了一种隧道巡检及消防机器人业务的处理装置,包括:
采集单元301,用于采集隧道内的环境信息;
判断单元302,用于将环境信息与火源判定条件进行比对,判断隧道内是否出现火源;
第一识别单元303,用于当出现火源时,将火源位置处的图像数据输入至训练好的物体识别模型中,输出物体的识别结果;
灭火单元304,用于根据物体的识别结果采取对应灭火措施,并发送警报信息至远程控制台。
在一种具体的实施方式中,还包括:
训练单元,用于采用大量的不同种类的物体的图像样本作为数据集,用于训练构建好的物体识别模型。
在一种具体的实施方式中,判断单元302具体用于将采集到的温度、亮度以及烟雾浓度分别与预置的火源判定条件进行比对,若温度、亮度以及烟雾浓度达到预置的火源判定条件,则隧道内出现火源;否则没有出现火源。
在一种具体的实施方式中,还包括:第二识别单元,用于当没有出现火源时,将获取的周围环境的图片输入到训练好的物体识别模型中,输出物体的识别结果;根据物体的识别结果,对物体进行清理,或者绕开物体继续巡逻。
本申请还提供了一种隧道巡检及消防机器人的简易结构示意图,如图4所示,图4中包括:
分析识别模块,灭火模块以及通信模块;
所述信息采集模块用于采集隧道内的环境信息;
分析识别模块用于对环境信息进行分析,判断周围环境是否存在火源,识别周围环境中的物体;
灭火模块用于根据着火物体采取对应的灭火措施;
通信模块用于将环境信息以及分析结果传输至远程控制台,并执行远程控制台下发的指令。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统,装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
本申请的说明书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本申请的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
应当理解,在本申请中,“至少一个(项)”是指一个或者多个,“多个”是指两个或两个以上。“和/或”,用于描述关联对象的关联关系,表示可以存在三种关系,例如,“A和/或B”可以表示:只存在A,只存在B以及同时存在A和B三种情况,其中A,B可以是单数或者复数。字符“/”一般表示前后关联对象是一种“或”的关系。“以下至少一项(个)”或其类似表达,是指这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a,b或c中的至少一项(个),可以表示:a,b,c,“a和b”,“a和c”,“b和c”,或“a和b和c”,其中a,b,c可以是单个,也可以是多个。
在本申请所提供的几个实施例中,应该理解到,所揭露的系统,装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
另外,在本申请各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
以上所述,以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围。
- 一种隧道巡检及消防机器人业务的处理方法及装置
- 一种隧道巡检机器人的自动充电的装置及隧道巡检机器人