基于实际导航性能的飞行误差实时评估方法
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及导航性能监测技术领域,具体为基于实际导航性能的飞行误差实时评估方法。
背景技术
导航性能(RNP Required Navigation Performance)是1991年由未来空中导航系统(FANS,Future Air Navigation Systems)委员会向国际民航组织(ICAO,InternationalCivil Aviation Organization)提出,在1994年ICAO提出颁布的RNP手册中定义为:飞机在一个确定的航路、空域或区域运行时,所需的导航性能精度。RNP是通过对导航精度的描述来确定在某一空域内运行需要的导航性能,因此RNP不仅对航空器机载导航设备有相关要求,对支持相应RNP类型空域的导航系统精度也有一定的要求,RNP类型则是用相应的精度值来表示。
利用不同导航性能要求去定义不同等级的RNP类型,制定划分空域和航路类型。导航性能包括各性能参数,即精度、完好性、连续性等。对应于某个等级的空域和航路类型的各性能参数都有要求,选择主要的具有代表性的参数精度去划分类型,它由导航传感器误差、机载卫星接收机误差、显示误差和飞行技术误差(FTE)组合而成,这种组合也称为“导航性能精度(TSE)”。在某一空域或一条航路上,要求其每架飞机的导航系统精度在总飞行小时的95%时间内出现偏离希望航迹的距离不得超过某一数值。这个统计特性上的精度值被定义为“包容距离”,如图1所示。
图1中,RNP包容距离(RNP-X)在95%时间内处于其中,RNP包容区是一个2×RNP-X的区域,包容度为99.999%的时间概率。
在RNP中,要求运营航空器具有机载性能监测和告警功能,未达到所需侧向导航精度可能是由航空器沿线飞行和定位误差造成的。从而将误差源定义为如下三种误差,以使得导航精度的度量有定义且便于量化、精确度量和控制。
航径定义误差(PDE Path definition error):定义航径与预期航径之间的误差;
飞行技术误差(FTE Flight Technical Error):估计位置与定义航径之间的误差;
导航系统误差(NSE Navigation system error):飞行器真实位置与估计位置之间的误差;
上述三种误差组成总系统误差(TSE Total system error),其中PDE数值较小,通常可以忽略不计。三者几何关系如图2所示。
当飞机在某一空域或一条RNP航路上飞行时,飞行员若能从仪表上实时知道飞机目前所在位置,就能确保飞机准确地飞行。为此,波音公司引入了实际导航性能(ANPActual Navigation Performance),将其定义为飞行管理计算机(FMC Flight ManagementComputer)估算的位置与飞机实际位置之间的误差。ANP表达的是以FMC位置为圆心的包容距离,其飞机实际位置落在改包容距离的概率为95%。高性能的FMC根据导航传感器传输回来的导航数据,选择其中精度最高的数据对飞机当前导航精度进行估算,得到ANP,该值显示给飞行员,飞行员获此消息,就能准确地估计出飞机的实际位置。
在一个知道的RNP航路上,如果ANP只占系统误差的一小部分,意味着飞行员可操作的空间很大,即可允许的飞行技术误差可以变大,减轻了飞行员的操作压力,如图3所示。
但是,目前对于飞行误差算法研究要么局限于理论研究阶段,要么在算法验证阶段中所用的飞行数据样本少,对不同飞行状态下的飞行误差数据的验证考虑不足,缺少在飞行仿真环境中飞行误差算法验证的阶段。
发明内容
针对上述问题,本发明的目的在于提供一种基于实际导航性能的飞行误差实时评估方法,以飞行仿真环境中飞机实时位置经纬度和自定义预期航段起始点和终止点经纬度作为输入,实时结算出的系统导航误差值与飞机飞行所处航段规定的RNP值比较,从而达到飞行误差评估及飞行误差算法验证的目的,解决飞机执行RNP飞行程序的飞行误差评估问题。技术方案如下:
基于实际导航性能的飞行误差实时评估方法,包括如下步骤:
步骤1:获取飞机实时位置经纬度和预期航段起始点和终止点经纬度数据;
步骤2:将上述经纬度坐标通过米勒投影转化为平面坐标;
步骤3:确定预期航段起始点和终止点在平面坐标系下所连直线,计算飞机实时位置在平面坐标系下的坐标在该直线上的投影点的坐标;
步骤4:将计算所得的投影点坐标通过米勒投影的逆转换获得投影点的经纬度坐标;
步骤5:计算飞机实时位置经纬度坐标与对应投影点的经纬度坐标的经度差和纬度差,进而得到飞机估计位置与预期位置的经度误差数组与纬度误差数组;
步骤6:根据飞机估计位置与期望位置的经度误差数组和纬度误差数组,分别计算经度差的方差和纬度差的方差以及两者的协方差,得到误差协方差矩阵;根据误差协方差矩阵得到以飞机估计位置为原点的1σ等概率误差椭圆,根据计算得到的等概率误差椭圆的长半轴值,以及与误差椭圆扁平率有关的转换因子k求取ANP值,即为实际导航性能值;
步骤7:根据所述ANP值和飞机所处航段工业标准的飞行技术误差FTE值,通过系统导航总误差的计算公式,计算得到的系统导航总误差,即TSE值;
步骤8:将计算所得的TSE值与飞机所处航段的RNP值比较,若TSE值小于RNP值则认为飞行误差正常,若TSE值大于RNP值则认为飞行误差过大。
进一步的,所述步骤3中,计算飞机实时位置在预期航段上的投影点的具体方法为:
步骤3.1:计算所述直线的斜率;
步骤3.2:若该直线的斜率为0,则投影点的横坐标为直线上的横坐标,纵坐标为被投影
点的纵坐标;若该直线的斜率不为0,则投影点的坐标用以下公式计算:
y=y1+(-1/k)*(x-x1)
其中,x为投影点的横坐标,y为投影点的纵坐标;k为直线的斜率,x1为被投影点的横坐标,y1为被投影点的纵坐标;x2为直线上任意一点的横坐标,y2为直线上该点的纵坐标。
更进一步的,所述步骤6中,计算实际导航性能值的计算步骤具体包括:
步骤6.1:利用下式将经度误差数组转换为直角坐标系x方向上的误差数组:
其中,Δx为x方向上的误差,l1为经度误差,R为地球半径,l2为飞机实时位置纬度;步骤6.2:利用下式将纬度误差数组转换为直角坐标系y方向上的误差数组:
Δy=(l3*π/180)*R
其中,Δy为y方向上的误差,l3为纬度误差;
步骤6.3:计算直角坐标系x方向和y方向上误差数组的方差以及两个数组的协方差,获得误差协方差矩阵;
步骤6.4:计算误差协方差矩阵的特征值λ
步骤6.5:计算1σ误差椭圆95%不确定度区域的误差概率,计算公式如下:
式中,P为误差概率,k为转换因子;
令x=rcosθ,y=rsinθ;其中,r为平面坐标系中的点在极坐标系下对应点的极径,θ为平面坐标系中的点在极坐标系下对应点的极角;将上式整理得:
根据转换因子k与误差椭圆扁平率ratio的关系,当误差椭圆扁平率ratio趋于1时,转换因子k为2.4477,当误差椭圆扁平率ratio趋于无穷时,转换因子k为1.962;
为简化计算步骤将转换因子k关于误差椭圆扁平率ratio的曲线拟合为下式:
步骤6.6:根据实际导航性能的定义,ANP值的计算公式如下:
ANP=k*max(λ
其中,k为转换因子,λ
更进一步的,所述步骤7中,飞行技术误差在RNP飞行程序中取0.125海里。
更进一步的,所述步骤8中,RNP飞行程序在进近航段的RNP值为0.3海里,其余航段的RNP≥1海里。
本发明的有益效果是:考虑了飞行误差算法在本发明利用实时结算出的系统导航误差值与飞机飞行所处航段规定的RNP值比较,从而达到飞行误差评估的目的,解决飞机执行RNP飞行程序的飞行误差评估问题;为飞行仿真过程中飞行误差的实时评估提供了一种方法,可用于飞行程序合理性验证等问题。
附图说明
图1为RNP包容距离和包容区关系图。
图2为实际导航性能与飞行技术误差定义阐述示意图。
图3为实际导航性能与RNP关系图。
图4为误差椭圆扁平率ratio与转换因子k关系图。
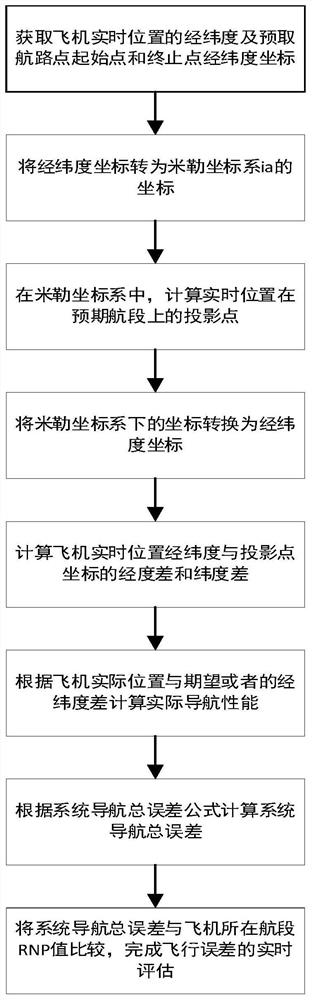
图5为本发明基于实际导航性能的飞行误差实时评估方法的流程图。
图6为本发明实际导航性能值的算法流程图。
图7为实施例中离场RNP程序飞行误差折线图。
具体实施方式
下面结合附图和具体实施例对本发明做进一步详细说明。本实施例基于Bluesky飞行仿真平台,通过DIS分布式交互仿真协议获取飞机位置数据和航段数据,下面结合附图及具体实施例对本发明的应用原理作进一步描述。
图5是本发明的流程图,具体过程如下:
步骤1、获取飞机实时位置经纬度和预期航段起始点和终止点经纬度数据。
此处预期航段的起始点和终止点的经纬度即为飞行程序中该航段的起始点和终止点的经纬度。
步骤2、通过米勒投影将飞机与航路点的坐标转换为平面坐标。
步骤3、确定预期航段起始点和终止点在平面坐标系下所连直线,计算飞机实时位置在平面坐标系下的坐标在该直线上的投影点的坐标。
步骤3.1、计算所述直线的斜率;
步骤3.2、若直线的斜率为0,则投影点的横坐标为直线上点的横坐标,纵坐标为被投影点的纵坐标。若直线的斜率不为0,则投影点的坐标用以下公式计算,
y=y1+(-1/k)*(x-x1)
其中,x为投影点的横坐标,y为投影点的纵坐标;k为直线的斜率,x1为被投影点的横坐标,y1为被投影点的纵坐标;x2为直线上一点的横坐标,y2为直线上该点的纵坐标。
步骤4、将计算所得的投影点坐标通过米勒投影的逆转换获得投影点的经纬度坐标;
步骤5、计算飞机实时位置经纬度与投影点坐标的经度差和纬度差,如表2所示。
表1实施例1中离场RNP程序飞行数据记录数据
步骤6、利用飞机实际位置与期望位置的经纬度差计算实际导航性能值,算法流程图如图6所示。
步骤6.1、利用以下公式将经度误差数组转换为直角坐标系x方向上的误差数组,
其中,Δx为x方向上的误差,l1为经度误差,R为地球半径,本实施例取6371000米,l2为飞机实时位置纬度。
步骤6.2、利用以下公式将纬度误差数组转换为直角坐标系y方向上的误差数组,
Δy=(l3*π/180)*R
其中,Δy为y方向上的误差,l3为纬度误差。
步骤6.3、计算直角坐标系x方向和y方向上误差数组的方差以及两个数组的协方差,获得误差协方差矩阵;
步骤6.4:计算误差协方差矩阵的特征值λ
步骤6.5:计算1σ误差椭圆95%不确定度区域的误差概率,计算公式如下:
式中,P为误差概率,k为转换因子;
令x=rcosθ,y=rsinθ,其中,r为平面坐标系中的点在极坐标系下对应点的极径,θ为平面坐标系中的点在极坐标系下对应点的极角;将上式整理得:
当P为95%时,可得转换因子k与误差椭圆扁平率ratio的关系如图4示,当误差椭圆扁平率趋于1时,转换因子为2.4477,当误差椭圆扁平率趋于无穷时,转换因子为1.9625,为简化计算步骤将附图4中转换因子k关于误差椭圆扁平率ratio的曲线拟合为下式:
步骤6.6:根据实际导航性能的定义,ANP值的计算公式如下:
ANP=k*max(λ
其中,k为转换因子,λ
步骤7、根据所述ANP值和飞机所处航段工业标准的飞行技术误差FTE值,通过系统导航总误差的计算公式,计算得到的系统导航总误差,即TSE值。
飞行技术误差(FTE)由于影响因素过多,比如导航设备、空间信号、风况及人为的不可预测的因素,因此想实时估计飞机FTE值非常困难,本实施例是针对飞机进行足够多的试验,并制成相应的表格,使用时直接查询,工业标准的水平路径飞行技术误差如下表。
表2工业标准的水平路径飞行技术误差
系统导航总误差的计算公式为:
将基于椭圆误差所得的实际导航性能值(ANP)与工业标准的飞行技术误差值(FTE)代入上式计算,即可得到系统导航总误差。
步骤8、将系统导航总误差与飞机所在航段RNP值比较完成飞行误差的实时评估,如图7所示。在图中从上至下曲线表示的含义依次为所需导航性能(RNP值)、系统总误差(TSE值)、飞行技术误差(FTE值)和实际导航性能(ANP值),通过对实际导航性能和系统总误差的实时计算与显示,可以从图中直观的看出在0-160秒的飞行过程中,实际导航性能大约为0.05海里,系统总误差大约为0.14海里,RNP最小要求为0.3海里,系统总误差满足该航段的RNP值要求。
- 基于实际导航性能的飞行误差实时评估方法
- 组合导航系统实际导航性能评估装置及其评估方法