一种远程驾驶的实现方法及实现装置
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及辅助驾驶领域,尤其涉及一种远程驾驶的实现方法及实现装置。
背景技术
目前远程控制车辆的通用方案都是采用远程控制器通过专用网络或者互联网远程控制车辆的动作;而针对互联网的远程控制方式驾驶机械进行作业领域具有局限性,例如,远程控制时的时间延迟问题以及远程控制时周围环境采集的时延;和由于网络带来的时延导致距离不能太远的限制。
这些问题严重的约束着远程控制方式驾驶机械进行作业领域的发展,随着5G技术的成熟,传输时延问题已经有所缓解,但是还存在由于大量的视频信息和带宽的约束,导致重要的环境信息环节时延较高,严重影响远程驾驶员的判断的问题。
发明内容
本发明实施例提供了一种远程驾驶的实现方法及实现装置,用于解决远程驾驶在远程控制中由于时延带来的限制使用距离和影响驾驶员判断的问题。
为了解决上述问题,本发明是这样实现的:
第一方面,本发明实施例提供了一种远程驾驶的实现方法,应用于车载摄像头,包括:
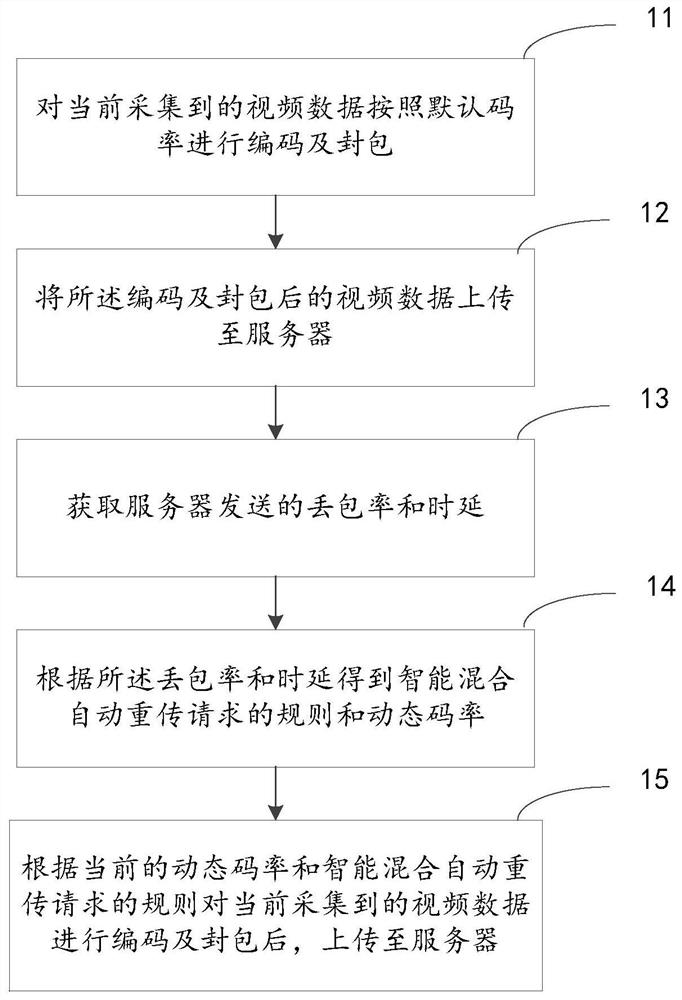
对当前采集到的视频数据按照默认码率进行编码及封包;
将所述编码及封包后的视频数据上传至服务器;
获取服务器发送的丢包率和时延;
根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率;
根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。
可选的,还包括:
获取车载摄像头配置;
根据所述车载摄像头配置采集视频数据;
其中,所述获取车载摄像头配置包括:
判断与所述服务器是否连接成功;
若连接成功,使用默认的车载摄像头配置;
若连接失败,从所述服务器获取车载摄像头配置,若获取成功,使用从服务器获取的车载摄像头配置,若获取失败,使用默认的车载摄像头配置。
可选的,所述车载摄像头配置包括以下至少一项:是否推流、是否上传数据、是否采集音频和编码是否去掉B帧。
可选的,所述智能混合自动重传请求的规则包括以下至少一项:
当0 当第一预设阈值 当第二预设阈值 其中,P 可选的,获取服务器发送的丢包率和时延之后还包括:当第二预设阈值 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令; 其中,Pc为所述丢包率;RTT为所述时延。 可选的,所述动态码率计算包括: 当P 当P 当P 其中,P 第二方面,本发明实施例提供了一种远程驾驶的实现方法,应用于服务器,包括: 与车载摄像头连接; 接收所述车载摄像头上传的编码及封包后的视频数据; 根据所述编码及封包后的视频数据计算丢包率和时延; 将所述丢包率和所述时延发送至所述车载摄像头。 可选的,接收所述车载摄像头发送的指示信息,所述指示信息用于指示所述丢包率大于第二预设阈值,所述时延大于第三预设阈值; 根据所述指示信息执行以下至少之一: 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令。 可选的,所述丢包率的计算公式为:P 其中,P 可选的,所述时延的计算公式为: RTT=w*(RTT 其中,RTT为所述时延;T1为规定时间周期内服务器第一次收到车载摄像头发送的数据的时间;T2为规定时间周期内车载摄像头第一次收到服务器发送的数据的时间。 第三方面,本发明实施例提供了一种远程驾驶的实现装置,其特征在于,包括: 第一处理模块,用于对当前采集到的视频数据按照默认码率进行编码及封包; 第一发送模块,用于将所述编码及封包后的视频数据上传至服务器; 第一接收模块,用于获取服务器发送的丢包率和时延; 第一计算模块,用于根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率; 第二处理模块,用于根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。 可选的,所述第一接收模块包括: 第一判断子模块,用于判断与所述服务器是否连接成功; 若连接成功,使用默认的车载摄像头配置; 若连接失败,从所述服务器获取车载摄像头配置,若获取成功,使用从服务器获取的车载摄像头配置,若获取失败,使用默认的车载摄像头配置。 可选的,所述车载摄像头配置包括以下至少一项:是否推流、是否上传数据、是否采集音频和编码是否去掉B帧。 可选的,所述智能混合自动重传请求的规则包括以下至少一项: 当0 当第一预设阈值 当第二预设阈值 其中,Pc为所述丢包率;RTT为所述时延。 可选的,还包括:指示模块,用于当第二预设阈值 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令; 其中,Pc为所述丢包率;RTT为所述时延。 可选的,所述动态码率计算包括: 当P 当P 当P 其中,P 第四方面,本发明实施例提供了一种远程驾驶的实现装置,包括: 第三处理模块,用于与车载摄像头连接; 第二接收模块,用于接收所述车载摄像头上传的编码及封包后的视频数据; 第二计算模块,用于根据所述编码及封包后的视频数据计算丢包率和时延; 第三发送模块,用于将所述丢包率和所述时延发送至所述车载摄像头。 本发明实施例中,可选的,第四接收模块,用于接收所述车载摄像头发送的指示信息,所述指示信息用于指示所述丢包率大于第二预设阈值,所述时延大于第三预设阈值; 根据所述指示信息执行以下至少之一: 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令。 可选的,所述丢包率的计算公式为:P 其中,P 可选的,所述时延的计算公式为: RTT=w*(RTT 其中,RTT为所述时延;T1为规定时间周期内服务器第一次收到车载摄像头发送的数据的时间;T2为规定时间周期内车载摄像头第一次收到服务器发送的数据的时间。 第五方面,本发明实施例提供了一种远程驾驶的实现装置,其特征在于,包括:收发器和处理器; 所述处理器,用于对当前采集到的视频数据按照默认码率进行编码及封包; 所述收发器,用于将所述编码及封包后的视频数据上传至服务器; 所述收发器,用于获取服务器发送的丢包率和时延; 所述处理器,用于根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率; 所述处理器,用于根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。 第六方面,本发明实施例提供了一种远程驾驶的实现装置,其特征在于,包括:收发器和处理器; 所述处理器,用于与车载摄像头连接; 所述处理器,用于接收所述车载摄像头上传的编码及封包后的视频数据; 所述处理器,用于根据所述编码及封包后的视频数据计算丢包率和时延; 所述收发器,用于将所述丢包率和所述时延发送至所述车载摄像头。 第七方面,本发明实施例提供了一种车载摄像头,其特征在于,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如第一方面中任一项所述的远程驾驶的实现方法的步骤。 第八方面,本发明实施例提供了一种服务器,其特征在于,包括:处理器、存储器及存储在所述存储器上并可在所述处理器上运行的程序,所述程序被所述处理器执行时实现如第二方面中任一项所述的远程驾驶的实现方法的步骤。 第九方面,本发明实施例提供了一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面中任一项所述的远程驾驶的实现方法,或者实现如第二方面中任一项所述的远程驾驶的实现方法的步骤。 本发明实施例中,通过车载摄像头动态获取服务器配置,按照动态需求采集数据,并动态的控制上传码率和智能混合自动重传请求的规则,保证采集数据的低时延,保证远程控制的准确性和实时性,解决了远程驾驶在远程控制中由于时延带来的限制使用距离和影响驾驶员判断的问题。 附图说明 通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中: 图1为本发明实施例提供的一种远程驾驶的实现方法应用于车载摄像头的流程示意图; 图2为本发明实施例提供的一种远程驾驶的实现方法车载摄像头处理流程示意图; 图3为本发明实施例提供的一种远程驾驶的实现方法的主要处理流程示意图; 图4为本发明实施例提供的一种智能混合自动重传请求的规则示意图; 图5为本发明实施例提供的一种远程驾驶的实现方法应用于服务器的流程示意图; 图6为本发明实施例提供的一种时延计算结构示意图; 图7为本发明实施例提供的一种远程驾驶结构示意图; 图8为本发明实施例提供的一种远程驾驶的实现方法中远程控制台架的主要处理流程示意图; 图9为本发明实施例提供的一种远程驾驶的实现方法中远控服务器的主要处理流程示意图; 图10为本发明实施例提供的一种远程驾驶的实现装置应用于车载摄像头的结构示意图; 图11为本发明实施例提供的一种远程驾驶的实现装置应用于服务器的结构示意图; 图12为本发明实施例提供的一种车载摄像头的结构示意图; 图13为本发明实施例提供的一种服务器的结构示意图; 图14为本发明实施例提供的另一种车载摄像头的结构示意图; 图15为本发明实施例提供的另一种服务器的结构示意图。 具体实施方式 下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。 请参考图1-图3,本发明实施例提供了一种远程驾驶的实现方法,应用于车载摄像头,包括: 步骤11:对当前采集到的视频数据按照默认码率进行编码及封包; 步骤12:将所述编码及封包后的视频数据上传至服务器; 步骤13:获取服务器发送的丢包率和时延; 步骤14:根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率; 步骤15:根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。 本发明实施例中,请参考图2,在步骤11中,根据所述视频采集模块采集到的视频数据上传至动态推流模块,所述动态推流模块动态判断是否需要推流确,确定推流后视频动态码率模块和编码模块对所述车载摄像头采集到的视频数据进行默认的码率编码,采用H265编码,然后进行RTP(Real-time Transport Protocol,实时传输协议)封包,开始推流,同时进行RTCP(RTP Control Protocol,RTP控制协议)的传输和接收;在步骤12中,通过所述RTCP向服务器中的所述车载摄像头周期性地发送控制信息,视频服务器通过接收这些数据,获取所述车载摄像头的相关资料,以及网络状况、分组丢失概率等反馈信息,从而对服务质量进行控制或者对网络状况进行诊断;在步骤13中,所述服务器根据接收到信息进行丢包率和时延的计算并实时反馈至所述车载摄像头;在步骤14和步骤15中,所述车载摄像头根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率,并进行RTCP动态分析与决策,同时将最新获得的动态码率和智能混合自动重传请求的规则发送至视频动态码率模块进行步骤13中的操作。 本发明实施例中,通过车载摄像头动态获取服务器配置,按照动态需求采集数据,并动态的控制上传码率和智能混合自动重传请求的规则,保证采集数据的低时延,保证远程控制的准确性和实时性,解决了远程驾驶在远程控制中由于时延带来的限制使用距离和影响驾驶员判断的问题。 本发明实施例中,可选的,还包括: 获取车载摄像头配置; 根据所述车载摄像头配置采集视频数据; 其中,所述获取车载摄像头配置包括: 判断与所述服务器是否连接成功; 若连接成功,使用默认的车载摄像头配置; 若连接失败,从所述服务器获取车载摄像头配置,若获取成功,使用从服务器获取的车载摄像头配置,若获取失败,使用默认的车载摄像头配置。 本发明实施例中,可选的,所述车载摄像头配置包括以下至少一项:是否推流、是否上传数据、是否采集音频和编码是否去掉B帧。 请参考图3,本发明实施例中,所述车载摄像头开启后会自动连接远程控制服务器,若连接成功说明网络状况良好,所述车载摄像头则采用默认配置,若未连接成功,则定时获取所述车载摄像头配置,若所述服务器中没有所述车载摄像头配置或者获取失败,则采用默认的配置,所述车载摄像头配置包括以下至少一项:是否推流、是否上传数据、是否采集音频和编码是否去掉B帧。 本发明实施例中,可选的,所述智能混合自动重传请求的规则包括以下至少一项: 当0 当第一预设阈值 当第二预设阈值 其中,Pc为所述丢包率;RTT为所述时延。 本发明实施例中,可选的,获取服务器发送的丢包率和时延之后还包括: 当第二预设阈值 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令; 其中,Pc为所述丢包率;RTT为所述时延。 本发明实施例中,所述车载摄像头根据智能混合自动重传请求的规则得到的策略向所述服务器发送指示信息,从而使所述服务器对远程服务、上传摄像头数量和车辆驾驶状态进行控制。 请参考图4,本发明实施例中,根据RTCP包中的分组丢失状态、网络状态、所述丢包率和时延得到智能混合自动重传请求的规则,在智能混合自动重传请求的规则中,所述第一预设阈值设置为1%,所述第二预设阈值设置为4%;所述第三预设阈值设置为100ms;所述第四预设阈值设置为50ms;故智能混合自动重传请求的规则为,当0 本发明实施例中,可选的,所述动态码率计算包括: 当P 当P 当P 其中,P 本发明实施例中,通过车载摄像头动态获取服务器配置,按照动态需求采集数据,并动态的控制上传码率和智能混合自动重传请求的规则,保证采集数据的低时延,保证远程控制的准确性和实时性,解决了远程驾驶在远程控制中由于时延带来的限制使用距离和影响驾驶员判断的问题。 请参考图5,本发明实施例提供了一种远程驾驶的实现方法,应用于服务器,包括: 步骤51:与车载摄像头连接; 步骤52:接收所述车载摄像头上传的编码及封包后的视频数据; 步骤53:根据所述编码及封包后的视频数据计算丢包率和时延; 步骤54:将所述丢包率和所述时延发送至所述车载摄像头。 本发明实施例中,所述服务器根据所述车载摄像头发送的RTCP(RTP ControlProtocol,RTP控制协议)包中的参数计算丢包率和时延,并将所述丢包率和时延发送回所述车载摄像头,以便所述车载摄像头进行进一步的计算。 本发明实施例中,可选的,接收所述车载摄像头发送的指示信息,所述指示信息用于指示所述丢包率大于第二预设阈值,所述时延大于第三预设阈值; 根据所述指示信息执行以下至少之一: 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令。 本发明实施例中,所述服务器接收所述车载摄像头下发的指示信息,所述指示信息来自所述智能混合自动重传请求的规则得到的决策,当所述丢包率大于第二预设阈值,所述时延大于第三预设阈值会对远程服务及车辆行驶状态进行干预,包括:停止远程驾驶的控制指令、调整用于上传视频数据的车载摄像头的数量以及停止远程控制的指令;为了保证车辆行驶安全,在停止远程控制及远程驾驶的同时,会进行车辆打双闪,靠边停车等操作,保证驾驶安全。 本发明实施例中,可选的,所述丢包率的计算公式为: P 其中,P 本发明实施例中,所述丢包率计算的是权重后的丢包率,并在规定时间周期内平滑处理丢包率,防止QoS(Quality of Service,服务质量)抖动;根据所述丢包率,对网络情况进行判断,包括: 当P 当P 当P 其中,P 当网络拥塞时,降低发送速度;当网络空闲时,适当提升发送速度。 本发明实施例中,可选的,所述时延的计算公式为: RTT=w*(RTT 其中,RTT为所述时延;T1为规定时间周期内服务器第一次收到车载摄像头发送的数据的时间;T2为规定时间周期内车载摄像头第一次收到服务器发送的数据的时间。 请参考图6,本发明实施例中,以一个报文的时延计算为例,一个报文上传完成的流程假设有A,B两端,A为本端,B为对端,其中,A是数据发送方相当于车载摄像头端,发送SR包给到B,B相当于服务器端;B收到A发送的SR包,记录收到此SR包的时间T1;B经过一段时间的统计之后向A发送RR包,但如果B也向A发送媒体数据则发送的是SR包,RR包里面需要包含ReportBlock包,ReportBlock包中会把最近一次A的SR包的NTP(Network Time Protocol,网络时间协议)时间压缩为一个32位LSR和收到最近一个SR包的间隔DLSR发送给A;A收到B发送的RR包或SR包之后记录收到时间T2,用收到时间减去发送时就得到RTT1,所述计算公式为RTT1=T2-DLSR-T1。 本发明实施例中,通过车载摄像头动态获取服务器配置,按照动态需求采集数据,服务器对丢包率及时延进行计算,动态的控制上传码率和智能混合自动重传请求的规则,保证采集数据的低时延,保证远程控制的准确性和实时性,解决了远程驾驶在远程控制中由于时延带来的限制使用距离和影响驾驶员判断的问题。 请参考图7,本发明实施例中,远程驾驶结构包括:车机,服务器和驾驶舱;所述车载摄像头设置在所述车机中,所述车机中还包括:远程控制模块、5G CPE(CustomerPremise Equipment,客户前置设备)和CAN总线(Controller Area Network,控制器局域网络);其中所述5G CPE主要提供5G的网络通道;所述远程控制模块主要与后台的远程控制服务器连接接收控制信号,并转化为CAN总线的控制信号,发送到CAN总线;所述CAN总线主要作为车辆信号的通道;所述服务器主要组成模块有:后台管理、视频服务器、车辆管理服务和远控服务器;其中所述车辆管理服务主要管理车辆,摄像头等相关信息;所述远控服务器,主要提供远程控制车辆的通道,管理车辆和台架的链路状态;所述后台管理主要提供后台管理界面,可以设置摄像头参数等界面操作;所述视频服务器主要负责摄像头的视频传输;所述驾驶舱主要包括:远程控制台架、图像处理器和环视显示器;其中,所述远程控制台架主要作用是下发远程控制指令;所述图像处理器主要是接收摄像头的视频流并进行处理;所述环视显示器的主要作用就是实时显示摄像头的视频信息;请参考图8,所述图8为所述远程控制台架的主要处理流程,包括:所述远程控制台架开启并选择待控制的车辆并获取所述车辆的车载摄像头信息,然后向对应的远程控制服务器发送对应的指令,所述服务器会设置相对应的车辆的参数,允许上传的数据,并把相对应的动态参数下发给对应的车载摄像头;通知所述图像工作站获取所述车载摄像头上传的视频,获取视频服务器的流地址,从而把远端的图像信息显示在驾驶舱的显示屏上面;同时驾驶员根据视频信息下发的控制命令控制驾驶舱的远程控制器,并通过远程控制器把控制指令发送给远控服务器;请参考图9,为所述远控服务器的主要处理流程,包括:接收远程台架下发的指令,根据驾驶舱绑定的车辆,把相对应的控制指令下发给所述车辆车的远程控制模块,所述远程控制模块把指令下发到CAN总线,从而控制所述车辆。 请参考图10,本发明实施例提供了一种远程驾驶的实现装置,其特征在于,包括: 第一处理模块101,用于对当前采集到的视频数据按照默认码率进行编码及封包; 第一发送模块102,用于将所述编码及封包后的视频数据上传至服务器; 第一接收模块103,用于获取服务器发送的丢包率和时延; 第一计算模块104,用于根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率; 第二处理模块105,用于根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。 本发明实施例中,可选的, 还包括: 配置模块,用于获取车载摄像头配置;根据所述车载摄像头配置采集视频数据; 其中,所述配置模块包括: 第一判断子模块,用于判断与所述服务器是否连接成功; 若连接成功,使用默认的车载摄像头配置; 若连接失败,从所述服务器获取车载摄像头配置,若获取成功,使用从服务器获取的车载摄像头配置,若获取失败,使用默认的车载摄像头配置。 本发明实施例中,可选的,所述车载摄像头配置包括以下至少一项:是否推流、是否上传数据、是否采集音频和编码是否去掉B帧。 本发明实施例中,可选的,所述智能混合自动重传请求的规则包括以下至少一项: 当0 当第一预设阈值 当第二预设阈值 其中,Pc为所述丢包率;RTT为所述时延。 其中,P 本发明实施例中,可选的,还包括:指示模块,用于当第二预设阈值 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令; 其中,Pc为所述丢包率;RTT为所述时延。 本发明实施例中,可选的,所述动态码率计算包括: 当P 当P 当P 其中,P 本发明实施例提供的网络侧设备能够实现图1的方法实施例中远程驾驶的实现方法实现的各个过程,为避免重复,这里不再赘述。 请参考图11,本发明实施例提供了一种远程驾驶的实现装置,包括: 第三处理模块111,用于与车载摄像头连接; 第二接收模块112,用于接收所述车载摄像头上传的编码及封包后的视频数据; 第二计算模块113,用于根据所述编码及封包后的视频数据计算丢包率和时延; 第三发送模块114,用于将所述丢包率和所述时延发送至所述车载摄像头。 本发明实施例中,可选的,第四接收模块,用于接收所述车载摄像头发送的指示信息,所述指示信息用于指示所述丢包率大于第二预设阈值,所述时延大于第三预设阈值; 根据所述指示信息执行以下至少之一: 向远程控制台架发送用于停止远程驾驶的控制指令; 根据在线车辆状态和网络带宽,设置用于上传视频数据的车载摄像头的数量; 向远程控制台架发送用于停止远程控制的指令。 本发明实施例中,可选的,所述丢包率的计算公式为: P 其中,P 本发明实施例中,可选的,所述时延的计算公式为: RTT=w*(RTT 其中,RTT为所述时延;T1为规定时间周期内服务器第一次收到车载摄像头发送的数据的时间;T2为规定时间周期内车载摄像头第一次收到服务器发送的数据的时间。 本发明实施例提供的网络侧设备能够实现图5的方法实施例中远程驾驶的实现方法实现的各个过程,为避免重复,这里不再赘述。 请参考图12,本发明实施例提供了一种车载摄像头120,其特征在于,包括:收发器121和处理器122; 所述处理器122,用于对当前采集到的视频数据按照默认码率进行编码及封包; 所述收发器121,用于将所述编码及封包后的视频数据上传至服务器; 所述收发器121,用于获取服务器发送的丢包率和时延; 所述处理器122,用于根据所述丢包率和时延得到智能混合自动重传请求的规则和动态码率; 所述处理器,用于根据当前的动态码率和智能混合自动重传请求的规则对当前采集到的视频数据进行编码及封包后,上传至服务器。 请参考图13,本发明实施例提供了一种服务器130,其特征在于,包括:收发器121和处理器122; 所述处理器122,用于与车载摄像头连接; 所述处理器122,用于接收所述车载摄像头上传的编码及封包后的视频数据; 所述处理器122,用于根据所述编码及封包后的视频数据计算丢包率和时延; 所述收发器121,用于将所述丢包率和所述时延发送至所述车载摄像头。 请参考图14,本发明实施例还提供一种车载摄像头140,包括处理器141,存储器142,存储在存储器142上并可在所述处理器141上运行的计算机程序,该计算机程序被处理器141执行时实现上述远程驾驶的实现方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。 请参考图15,本发明实施例还提供一种服务器150,包括处理器151,存储器152,存储在存储器152上并可在所述处理器151上运行的计算机程序,该计算机程序被处理器151执行时实现上述远程驾驶的实现方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。 本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储计算机程序,所述计算机程序被处理器执行时实现上述远程驾驶的实现方法实施例的各个过程,且能达到相同的技术效果,为避免重复,这里不再赘述。其中,所述的计算机可读存储介质,如只读存储器(Read-Only Memory,ROM)、随机存取存储器(Random Access Memory,RAM)、磁碟或者光盘等。 需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。 通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质(如ROM/RAM、磁碟、光盘)中,包括若干指令用以使得一台终端(可以是手机,计算机,服务器,空调器,或者终端等)执行本发明各个实施例所述的方法。 上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
- 一种远程驾驶的实现方法及实现装置
- 一种全自动运行系统中远程限制驾驶模式实现方法