一种轨道自动铺设用新能源机车
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及新能源机车技术领域,尤其涉及一种轨道自动铺设用新能源机车。
背景技术
随着城市化进程的推进,为引导城市结构调整、优化空间布局、提高土地使用效率,我国不断推进城市轨道交通的建设,各地方政府也积极筹备,提交城市轨道交通建设规划。这都将为城市轨道交通各子行业带来巨大的市场需求。
现有轨道自动铺设用新能源机车铺轨设备在铺设轨道时,通常都是先采用把轨排从新能源机车铺轨设备后跟随的轨排车上起吊,移送到前悬臂下,下落至规划好的两轨道线内侧,进而通过新能源机车铺轨设备的铺设机构将轨道一端吊起并借助人工从旁辅助,将吊起部位的轨道铺设在规划好的轨道线上,新能源机车铺轨设备也随之在新铺设轨道上前移行走,如此循环前进,但现有新能源机车铺轨设备的铺设机构在铺设轨道过程中,因轨排自重大、长度长,其大多都是通过一个机械手的夹取钳先将单个轨排一端吊起,将吊起部位铺设在轨道线,再将另一轨排一端吊起,将吊起部位铺设在轨道线,新能源机车铺轨设备也随之在新铺设轨道上前移行走,此种铺设方法设备简单,使用方便,但效率较低,同时对现场工作人员劳动强度较大。
因此,提出了一种轨道自动铺设用新能源机车。
发明内容
基于现有的铺设方法设备简单,使用方便,但效率较低,同时对现场工作人员劳动强度较大的技术问题,本发明提出了一种轨道自动铺设用新能源机车。
本发明提出的一种轨道自动铺设用新能源机车,包括新能源机车本体,所述新能源机车本体的下表面分别设置有驱动行驶机组和轨道行驶辅助导向机构,且两个所述驱动行驶机组在所述新能源机车本体的下表面呈对称状分布,两个所述驱动行驶机组通过其内置的电机做驱动源使锥齿轮转动,带动新能源机车本体进行水平方向的直线行走;
所述轨道行驶辅助导向机构位于所述驱动行驶机组的左侧,所述新能源机车本体的下表面开设有呈对称分布的第一安装槽,所述轨道行驶辅助导向机构包括两个缓冲弹簧和两个滑块,所述新能源机车本体在新铺设的轨道用轨排上行走前,所述轨道行驶辅助导向机构压着新铺设的轨道,并对新铺设的轨道铺设方向进行辅助导向;
所述新能源机车本体的上表面分别设置有控制机构、双位自动铺设机构和升降机构;
所述控制机构固定安装于所述新能源机车本体的上表面左端,所述控制机构上多个按钮分别控制所述驱动行驶机组、轨道行驶辅助导向机构、双位自动铺设机构和升降机构的启停;
所述双位自动铺设机构包括支撑块,所述支撑块的左侧表面固定连接有呈对称分布的驱动电机,两个所述驱动电机驱动双位自动铺设机构将需铺设的两个轨排分别铲起自动拨动至规定铺设轨道线上进行铺设;
所述升降机构包括气缸,所述气缸的活塞杆一端下表面固定连接有升降板,所述气缸工作带动升降板做竖直方向的升降运动。
优选地,两个所述缓冲弹簧以单个为一组的一端自由端分别与第一安装槽的内顶壁固定连接,两个所述缓冲弹簧以单个为一组的另一端自由端分别与滑块的上表面固定连接,两个所述滑块以单个为一组的外表面分别与第一安装槽的内壁滑动套接,两个所述滑块的下表面均开设有轨道槽,两个所述轨道槽以单个为一组的前内壁和后内壁分别开设有液压腔,四个所述液压腔的内部均设置有液压油,四个所述液压腔的内壁均固定连接有压缩弹簧,四个所述压缩弹簧的一端自由端均固定连接有挤压块,所述缓冲弹簧对滑块下表面开设的轨道槽与轨排接触产生的波动进行缓冲。
优选地,四个所述挤压块以两个为一组相对的表面均开设有旋转槽,四个所述旋转槽的内壁均滑动套接有旋转球,所述挤压块对所述旋转球与轨排在接触过程中产生的震动进行力的传递,所述轨道槽和所述驱动行驶机组中驱动轮的轴线均位于同一轴线上,所述控制机构分别与驱动行驶机组、轨道行驶辅助导向机构、双位自动铺设机构和升降机构并联,两个所述驱动电机的输出轴通过联轴器均固定安装有传动轴。
优选地,两个所述传动轴以单个为一组的两端外表面分别设置有左旋螺纹和右旋螺纹,其中所述左旋螺纹的外表面螺纹连接有左旋螺纹套块,所述右旋螺纹的外表面螺纹连接有右旋螺纹套块,所述支撑块的左侧表面固定连接有呈对称分布的固定块,且两个所述固定块位于两个所述驱动电机之间,所述支撑块的左侧表面中部固定连接有定位块。
优选地,两个所述传动轴相对的表面通过轴承与固定块的内部固定定位后延伸至定位块的内部,两个所述左旋螺纹套块和两个所述右旋螺纹套块以一个左旋螺纹套块搭配一个右旋螺纹套块的下表面均开设有第二安装槽,多个所述第二安装槽的内顶壁与气缸的上表面固定连接,两个所述固定块相对的表面均固定连接有限位开关。
优选地,位于所述支撑块后端的所述限位开关与位于所述支撑块后端的所述驱动电机串联,位于所述支撑块前端的所述限位开关与位于所述支撑块前端的所述驱动电机串联,位于所述支撑块后端的所述限位开关正面与位于所述支撑块后端的所述左旋螺纹套块背面接触,对该所述左旋螺纹套块和右旋螺纹套块在所述传动轴表面的运动位置进行限位,位于所述支撑块前端的所述限位开关背面与位于所述支撑块前端的所述右旋螺纹套块背面接触,对该所述左旋螺纹套块和右旋螺纹套块在所述传动轴表面的运动位置进行限位,所述升降板的外表面与第二安装槽的内壁滑动套接,四个所述升降板以两个为一组相对的表面均固定连接有铲板。
优选地,四个所述铲板的外表面均呈梯形形状,四个所述铲板的材质均为高锰钢材料制成,位于所述支撑块后端的所述左旋螺纹套块下方所述升降板底部和位于所述支撑块前端的所述右旋螺纹套块下方所述升降板底部均固定安装有激光测距传感器。
优选地,所述激光测距传感器对所述升降板距铺设地面距离进行测量,并将测量数值传给所述控制机构中显示屏实时显示,所述定位块的下表面中心处固定安装有呈倒Y型的实时图像拍摄机构。
优选地,所述实时图像拍摄机构包括两个高清摄像头,两个所述高清摄像头之间的夹角范围为十度至二十度,两个所述高清摄像头对轨排的实地铺设路况进行高清拍摄,并将拍摄图像发送至所述控制机构显示屏高清显示。
优选地,其操作方法为:步骤一,准备,先将轨排从新能源机车铺轨设备后跟随的轨排车上起吊,移送到前悬臂下,下落至规划好的两轨道线内侧;
步骤二,铺设,按下控制机构上控制按钮,经过PLC程序处理后首先控制气缸工作,气缸的活塞杆带动升降板在第二安装槽的内壁向下滑动,升降板在做下降运动过程中,设置激光测距传感器检测到升降板下表面距地距离达到设定值后,将信号传给PLC程序,经其处理后控制气缸停止工作,其次,依次控制位于支撑块后端的驱动电机和位于支撑块前端的驱动电机启动,位于支撑块后端的驱动电机工作,带动与之连接的传动轴转动,通过传动轴表面的左螺纹和右螺纹,分别带动左旋螺纹套块和右旋螺纹套块做夹紧运动,同时位于支撑块前端的驱动电机工作,带动与之连接的传动轴转动,通过传动轴表面的左螺纹和右螺纹,分别带动左旋螺纹套块和右旋螺纹套块做夹紧运动,设置四个铲板以两个为一组将两个为一组的轨排同时铲起,再次按下控制机构上控制按钮,驱动电机反转,使两个左旋螺纹套块和右旋螺纹套块以一个左旋螺纹套块搭配一个右旋螺纹套块为一组向支撑块前、后方向做展开运动,将一组轨排一端吊起,将吊起部位自动铺设在规划好轨道线上,设置高清摄像头对铲板与轨排的夹取状态进行高清拍摄,以及铲板对轨排实际铺设样貌进行拍摄,从而便于工作人员通过控制机构的控制按钮进行微调;
步骤三,通过控制机构的操作杆控制驱动行驶机组通过其内置的电机做驱动源使锥齿轮转动,带动新能源机车本体在新铺设轨道上进行水平方向的直线行走,设置轨道行驶辅助导向机构起到新能源机车本体在新铺设的轨道用轨排上行走前,轨道行驶辅助导向机构压着新铺设的轨道,并对新铺设的轨道铺设方向进行辅助导向,防止驱动行驶机组的驱动轮脱轨。
本发明中的有益效果为:
1、通过设置实时图像拍摄机构,达到了设置高清摄像头对铲板与轨排的夹取状态进行高清拍摄,以及铲板对轨排实际铺设样貌进行拍摄,从而便于工作人员通过控制机构的控制按钮进行微调的效果。
2、通过设置升降机构,达到了设置气缸工作带动升降板做竖直方向的升降运动,从而便于工作人员操作铲板将以两个为一组的轨排轻松吊起,快速铺设的效果。
3、通过设置双位自动铺设机构,达到了通过本机构实现双工位将需铺设的两个轨排分别铲起自动拨动至规定铺设轨道线上进行铺设,不仅铺设效率高,还大大降低了工作人员劳动强度的效果。
附图说明
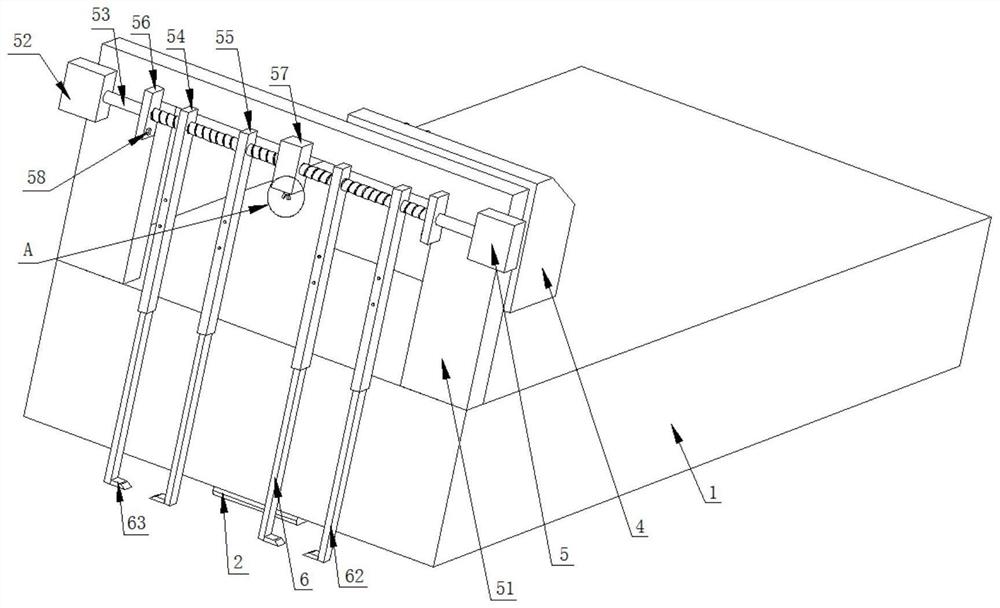
图1为一种轨道自动铺设用新能源机车的示意图;
图2为一种轨道自动铺设用新能源机车的图1中A处结构放大图;
图3为一种轨道自动铺设用新能源机车的新能源机车本体结构剖视图;
图4为一种轨道自动铺设用新能源机车的图3中B处结构放大图;
图5为一种轨道自动铺设用新能源机车的铲板结构夹取轨排主视图;
图6为一种轨道自动铺设用新能源机车的升降板结构剖视图;
图7为一种轨道自动铺设用新能源机车的定位块结构立体图。
图中:1、新能源机车本体;2、驱动行驶机组;3、轨道行驶辅助导向机构;31、缓冲弹簧;32、滑块;33、轨道槽;34、液压腔;35、压缩弹簧;36、挤压块;37、旋转球;4、控制机构;5、双位自动铺设机构;51、支撑块;52、驱动电机;53、传动轴;54、左旋螺纹套块;55、右旋螺纹套块;56、固定块;57、定位块;58、限位开关;6、升降机构;61、气缸;62、升降板;63、铲板;64、激光测距传感器;7、实时图像拍摄机构;71、高清摄像头。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参照图1-7,一种轨道自动铺设用新能源机车,包括新能源机车本体1,新能源机车本体1的下表面分别设置有驱动行驶机组2和轨道行驶辅助导向机构3,且两个驱动行驶机组2在新能源机车本体1的下表面呈对称状分布,两个驱动行驶机组2通过其内置的电机做驱动源使锥齿轮转动,带动新能源机车本体1进行水平方向的直线行走;
轨道行驶辅助导向机构3位于驱动行驶机组2的左侧,新能源机车本体1的下表面开设有呈对称分布的第一安装槽,轨道行驶辅助导向机构3包括两个缓冲弹簧31和两个滑块32,新能源机车本体1在新铺设的轨道用轨排上行走前,轨道行驶辅助导向机构3压着新铺设的轨道,并对新铺设的轨道铺设方向进行辅助导向;
新能源机车本体1的上表面分别设置有控制机构4、双位自动铺设机构5和升降机构6;
控制机构4固定安装于新能源机车本体1的上表面左端,控制机构4上多个按钮分别控制驱动行驶机组2、轨道行驶辅助导向机构3、双位自动铺设机构5和升降机构6的启停;
双位自动铺设机构5包括支撑块51,支撑块51的左侧表面固定连接有呈对称分布的驱动电机52,两个驱动电机52驱动双位自动铺设机构5将需铺设的两个轨排分别铲起自动拨动至规定铺设轨道线上进行铺设;
升降机构6包括气缸61,气缸61的活塞杆一端下表面固定连接有升降板62,气缸61工作带动升降板62做竖直方向的升降运动。
进一步地,两个缓冲弹簧31以单个为一组的一端自由端分别与第一安装槽的内顶壁固定连接,两个缓冲弹簧31以单个为一组的另一端自由端分别与滑块32的上表面固定连接,两个滑块32以单个为一组的外表面分别与第一安装槽的内壁滑动套接,两个滑块32的下表面均开设有轨道槽33,两个轨道槽33以单个为一组的前内壁和后内壁分别开设有液压腔34,四个液压腔34的内部均设置有液压油,四个液压腔34的内壁均固定连接有压缩弹簧35,四个压缩弹簧35的一端自由端均固定连接有挤压块36,缓冲弹簧31对滑块32下表面开设的轨道槽33与轨排接触产生的波动进行缓冲。
进一步地,四个挤压块36以两个为一组相对的表面均开设有旋转槽,四个旋转槽的内壁均滑动套接有旋转球37,挤压块36对旋转球37与轨排在接触过程中产生的震动进行力的传递,轨道槽33和驱动行驶机组2中驱动轮的轴线均位于同一轴线上,控制机构4分别与驱动行驶机组2、轨道行驶辅助导向机构3、双位自动铺设机构5和升降机构6并联,两个驱动电机52的输出轴通过联轴器均固定安装有传动轴53。
进一步地,两个传动轴53以单个为一组的两端外表面分别设置有左旋螺纹和右旋螺纹,其中左旋螺纹的外表面螺纹连接有左旋螺纹套块54,右旋螺纹的外表面螺纹连接有右旋螺纹套块55,支撑块51的左侧表面固定连接有呈对称分布的固定块56,且两个固定块56位于两个驱动电机52之间,支撑块51的左侧表面中部固定连接有定位块57。
进一步地,两个传动轴53相对的表面通过轴承与固定块56的内部固定定位后延伸至定位块57的内部,两个左旋螺纹套块54和两个右旋螺纹套块55以一个左旋螺纹套块54搭配一个右旋螺纹套块55的下表面均开设有第二安装槽,多个第二安装槽的内顶壁与气缸61的上表面固定连接,两个固定块56相对的表面均固定连接有限位开关58。
进一步地,位于支撑块51后端的限位开关58与位于支撑块51后端的驱动电机52串联,位于支撑块51前端的限位开关58与位于支撑块51前端的驱动电机52串联,位于支撑块51后端的限位开关58正面与位于支撑块51后端的左旋螺纹套块54背面接触,对该左旋螺纹套块54和右旋螺纹套块55在传动轴53表面的运动位置进行限位,位于支撑块51前端的限位开关58背面与位于支撑块51前端的右旋螺纹套块55背面接触,对该左旋螺纹套块54和右旋螺纹套块55在传动轴53表面的运动位置进行限位,升降板62的外表面与第二安装槽的内壁滑动套接,四个升降板62以两个为一组相对的表面均固定连接有铲板63。
进一步地,四个铲板63的外表面均呈梯形形状,四个铲板63的材质均为高锰钢材料制成,位于支撑块51后端的左旋螺纹套块54下方升降板62底部和位于支撑块51前端的右旋螺纹套块55下方升降板62底部均固定安装有激光测距传感器64。
进一步地,激光测距传感器64对升降板62距铺设地面距离进行测量,并将测量数值传给控制机构4中显示屏实时显示,定位块57的下表面中心处固定安装有呈倒Y型的实时图像拍摄机构7。
进一步地,实时图像拍摄机构7包括两个高清摄像头71,两个高清摄像头71之间的夹角范围为十度至二十度,两个高清摄像头71对轨排的实地铺设路况进行高清拍摄,并将拍摄图像发送至控制机构4显示屏高清显示。
通过设置实时图像拍摄机构7,达到了设置高清摄像头71对铲板63与轨排的夹取状态进行高清拍摄,以及铲板63对轨排实际铺设样貌进行拍摄,从而便于工作人员通过控制机构4的控制按钮进行微调的效果。
通过设置升降机构6,达到了设置气缸61工作带动升降板62做竖直方向的升降运动,从而便于工作人员操作铲板63将以两个为一组的轨排轻松吊起,快速铺设的效果。
通过设置双位自动铺设机构5,达到了通过本机构实现双工位将需铺设的两个轨排分别铲起自动拨动至规定铺设轨道线上进行铺设,不仅铺设效率高,还大大降低了工作人员劳动强度的效果。
工作原理:步骤一,准备,先将轨排从新能源机车铺轨设备后跟随的轨排车上起吊,移送到前悬臂下,下落至规划好的两轨道线内侧;
步骤二,铺设,按下控制机构4上控制按钮,经过PLC程序处理后首先控制气缸61工作,气缸61的活塞杆带动升降板62在第二安装槽的内壁向下滑动,升降板62在做下降运动过程中,设置激光测距传感器64检测到升降板62下表面距地距离达到设定值后,将信号传给PLC程序,经其处理后控制气缸61停止工作,其次,依次控制位于支撑块51后端的驱动电机52和位于支撑块51前端的驱动电机52启动,位于支撑块51后端的驱动电机52工作,带动与之连接的传动轴53转动,通过传动轴53表面的左螺纹和右螺纹,分别带动左旋螺纹套块54和右旋螺纹套块55做夹紧运动,同时位于支撑块51前端的驱动电机52工作,带动与之连接的传动轴53转动,通过传动轴53表面的左螺纹和右螺纹,分别带动左旋螺纹套块54和右旋螺纹套块55做夹紧运动,设置四个铲板63以两个为一组将两个为一组的轨排同时铲起,再次按下控制机构4上控制按钮,驱动电机52反转,使两个左旋螺纹套块54和右旋螺纹套块55以一个左旋螺纹套块54搭配一个右旋螺纹套块55为一组向支撑块51前、后方向做展开运动,将一组轨排一端吊起,将吊起部位自动铺设在规划好轨道线上,设置高清摄像头71对铲板63与轨排的夹取状态进行高清拍摄,以及铲板63对轨排实际铺设样貌进行拍摄,从而便于工作人员通过控制机构4的控制按钮进行微调;
步骤三,通过控制机构4的操作杆控制驱动行驶机组2通过其内置的电机做驱动源使锥齿轮转动,带动新能源机车本体1在新铺设轨道上进行水平方向的直线行走,设置轨道行驶辅助导向机构3起到新能源机车本体1在新铺设的轨道用轨排上行走前,轨道行驶辅助导向机构3压着新铺设的轨道,并对新铺设的轨道铺设方向进行辅助导向,防止驱动行驶机组2的驱动轮脱轨。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种轨道自动铺设用新能源机车
- 一种隧道建设新能源轨道电机车实时高精度自动定位系统