一种无人机高楼清洁装置
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及一种高楼清洁装置,尤其是涉及一种无人机高楼清洁装置。
背景技术
随着科技水平的不断提高及人工智能的不断发展,清洁机器人正逐渐进入人们的视野。然而现有的清洁机器人只能局限于地面的清洁工作,无法将清洁领域扩展到空中。而目前众所周知的高楼清洁工作,需要将人工吊挂在半空中进行业,这不仅增大了作业成本,效率也未必能保证,最重要的是可能导致人身安全问题。因此有必要设计一种建筑物高空清洗设备进行建筑物的高空清洁,以帮助人们实现全自动化、全方位的清洁服务,彻底解决人们的清洁问题。
现有的建筑物高空清洁墙壁或玻璃的智能设备一种是通过旋翼悬浮于空中,然后通过喷水和喷气清洗表面,其不足之处在于长时间悬浮于空中比较费电,为了达到更好的续航时间需要加大电池容量,但加大电池容量同时又会增加无人机自重,造成能量损耗;另一种是通过履带式吸附到墙面上,装置的清洁程度和速度不能得到保障。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种无人机高楼清洁装置。可以利用旋转叶片转动平面的倾斜,实现侧向移动、向墙面施压以及辅助升降,提升高空作业的效率和稳定性,降低高空作业的危险性。
本发明的目的可以通过以下技术方案来实现:
一种无人机高楼清洁装置,包括底座、设置于底座上的吸盘机构、喷液机构、设置于底座下方并用于清洗墙面的至少一个清洗盘、设置于底座上方的支撑支架以及可调整地设置于支撑支架上的多组旋转叶片,所述的底座上设有吊孔。
优选地,所述的底座为一板状结构。
优选地,所述的吸盘机构由多个设置于底座外侧并通过支腿与底座连接的吸盘构成。
优选地,所述的支腿与底座铰接,并通过舵机控制可在垂直于底座的方向上摆动。
优选地,所述的喷液机构包括固定于底座上的储液桶以及伸出底座边缘并朝向底座下方的喷液头。
优选地,所述的清洗盘为旋转式清洗盘刷,设有两个,并列布置于底座下方。
优选地,所述的支撑支架由呈倒置的“凵”字型主框架、可动地架设于主框架顶部并与主框架所在平面垂直的X向支撑梁以及可动地设置于X向支撑梁两端的两个Y向支撑梁组成,所述的旋转叶片设有四组,分别设置于两个Y向支撑梁的端部。
优选地,X向支撑梁和Y向支撑梁通过舵机控制旋转;每组旋转叶片具有两个旋转桨。
优选地,所述的吊孔设有两个,均用于绳索和电缆与该装置的连接。
优选地,该装置还包括控制器,所述的控制器采用单片机。
本发明的工作原理:
本发明在使用时,将绳索和电缆通过吊孔相接,另绳索另一端固定在楼顶。装置从楼顶下降到楼底时,在此过程中,旋转叶片转动为下降提供抵抗重力的作用力,来起到缓冲的作用,并且喷液头在储液桶里的水泵作用下喷洒清洁液(或者清洗盘转动清洁喷过的墙面)。在从楼底向上的返程中,清洗盘转动清洁喷过的墙面(或者喷液头在储液桶里的水泵作用下喷洒清洁液)。在最后接近楼顶时通过调整左右两侧的旋转叶片的旋转速度的相对大小(或者通过舵机控制两个支撑梁的转动角度),可以调整旋转叶片在水平方向上产生的总推力的方向及大小,从而实现装置侧向移动,再重复从上至下的清洁过程,整个过程有控制单片机驱动电机来控制。
与现有技术相比,本发明具有以下有益效果:
1、设置四组旋转叶片(共八个旋转桨),使用导线接收相应调速指令信号将螺旋扇叶的转动平面作倾斜来实现精确侧向移动(可通过调整左右两侧的旋转叶片的旋转速度的相对大小或通过舵机控制支撑梁的转动角度),代替人类工作,降低了在高空作业的危险性。
2、底座四周设置装有吸盘的支架,提升装置工作时的平稳性,能够抵御强风,从而提高装置的工作效率。
3、可以通过遥控器来控制单片机,从而改变装置工作路径,更加的便捷灵活。
4、采用多重安全保障,确保系统安全。
附图说明
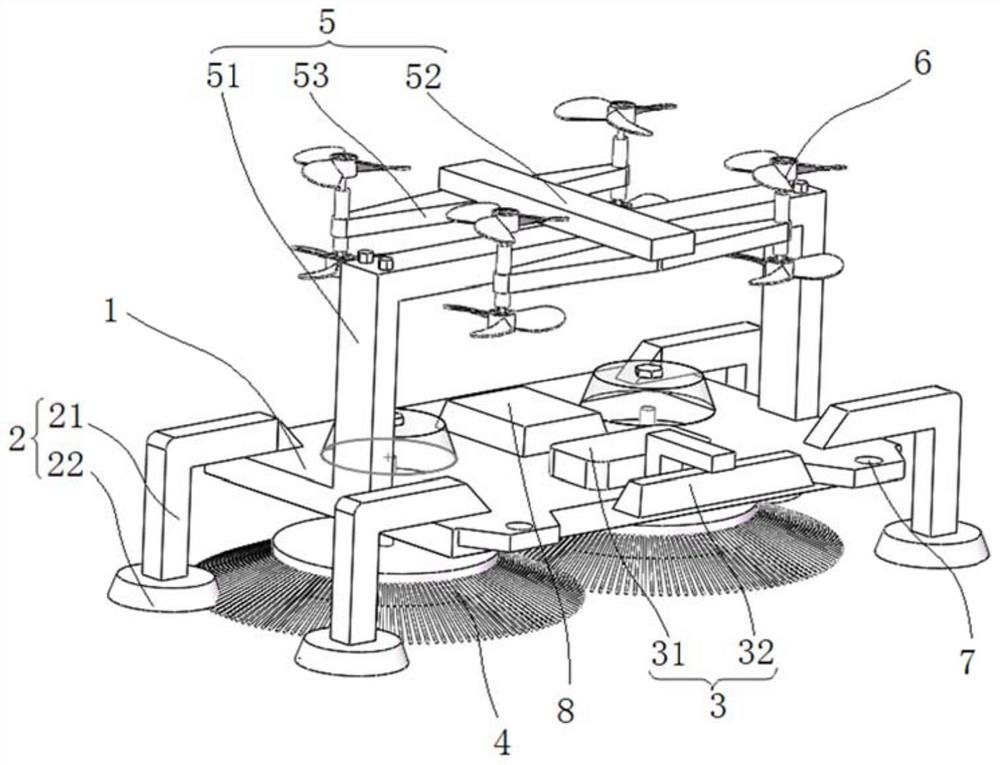
图1为本发明的无人机高楼清洁装置的结构示意图。
图2为本发明的无人机高楼清洁装置的俯视结构示意图。
图中,1为底座,2为吸盘机构,21为支腿,22为吸盘,3为喷液机构,31为储液桶,32为喷液头,4为清洗盘,5为支撑支架,51为主框架,52为X向支撑梁,53为Y向支撑梁,6为旋转叶片,7为吊孔,8为控制器。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。
实施例1
一种无人机高楼清洁装置,如图1~2所示,包括底座1、设置于底座1上的吸盘机构2、喷液机构3、设置于底座1下方并用于清洗墙面的至少一个清洗盘4、设置于底座1上方的支撑支架5以及可调整地设置于支撑支架5上的多组旋转叶片6,底座1上设有吊孔7。
本实施例中,如图1和图2所示,吊孔7设有两个,均用于绳索和电缆与该装置的连接。该装置还包括控制器8,控制器8采用单片机,例如STM32系列单片机等,并与其他部件典型连接。
更具体地:
本实施例中,优选底座1为一板状结构,更优选总体长呈矩形的板状结构。本实施例中,优选吸盘机构2由多个设置于底座1外侧并通过支腿21与底座1连接的吸盘22构成,如图1和图2所示本实施例中的吸盘机构2的数量为四个,设置于底座1两侧,并位于底座1靠近四个角的位置处。本实例中支腿21与底座1固定连接,实际中,还可以将支腿21与底座1铰接,并通过舵机控制可在垂直于底座1的方向上摆动。这样在不需要使用吸盘22(例如喷洒清洗液,或者在非光滑墙面上进行作业)时可以将吸盘22收起来,避免吸盘22对清洗盘4的干涉。本实施例中,优选喷液机构3包括固定于底座1上的储液桶31以及伸出底座1边缘并朝向底座1下方的喷液头32。储液桶31内还应该设有水泵,用以驱动清洗液流向喷液头32并喷出。实际中,也可以采用水管连接外接储液桶31的方式来减轻装置的重量,提升续航。本实施例中,优选清洗盘4为旋转式清洗盘刷(类似扫地机的盘刷),设有两个,并列布置于底座1下方。
本实施例中,支撑支架5由呈倒置的“凵”字型主框架51、可动地架设于主框架51顶部并与主框架51所在平面垂直的X向支撑梁52以及可动地设置于X向支撑梁52两端的两个Y向支撑梁53组成,旋转叶片6设有四组,分别设置于两个Y向支撑梁53的端部。可以通过调整左右两侧的旋转叶片的旋转速度的相对大小,或者X向支撑梁52和Y向支撑梁53通过舵机控制旋转,通过舵机控制两个支撑梁的转动角度。在使用时,可以利用旋转叶片6实现装置的侧向移动。也可以在下降过程中,通过调整合适的角度,向下吹风,起到缓冲的作用。还可以在该装置用于清洗非光滑平面的墙面时,向外吹风,将装置向墙面反推,避免清洗盘4与墙面脱离接触,降低清洗效果。本实施例中,优选每组旋转叶片6具有两个旋转桨(如图1~2所示,共八个旋转桨)。
本发明在使用时,将绳索和电缆通过吊孔相接,另绳索另一端固定在楼顶。装置从楼顶下降到楼底时,在此过程中,旋转叶片转动为下降提供抵抗重力的作用力,来起到缓冲的作用,并且喷液头在储液桶里的水泵作用下喷洒清洁液(或者清洗盘转动清洁喷过的墙面)。在从楼底向上的返程中,清洗盘转动清洁喷过的墙面(或者喷液头在储液桶里的水泵作用下喷洒清洁液)。在最后接近楼顶时通过调整左右两侧的旋转叶片的旋转速度的相对大小(或者通过舵机控制两个支撑梁的转动角度),可以调整旋转叶片在水平方向上产生的总推力的方向及大小,从而实现装置侧向移动,再重复从上至下的清洁过程,整个过程有控制单片机驱动电机来控制。
上述对实施例的描述是为便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
- 一种无人机高楼清洁装置
- 一种建筑高楼用外层玻璃清洁装置