一种智能书桌机器人
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及智能机器人技术领域,具体为一种智能书桌机器人。
背景技术
随着知识积累需求的日益增长,高校考研考证人数不断增加,图书馆作为开放式的优质学习空间,经常会出现的长期占座的不文明行为,而图书馆这种大范围“有书无坐”的现象常导致前来查阅书籍资料同学们对此心生厌恶却又无可奈何,只能匆匆借阅,此外,长期占座现象浪费了图书馆宝贵的公共资源和共享的阅读空间,有些同学占座长达数月或者更久,真正的阅读或学习时间却很少,极度影响图书馆的整体秩序和阅读环境。
据调查,多数高校并没有采取高效措施来避免该现象的发生,频繁的口头警告也并没有起到实质性的作用,目前,一些高校采用图书馆座位预约系统来限制同学们不合理的占座行为,通过更合理的座位分配,避免占座纠纷,但仍然不能从根本上解决同学们搁置闲置物品的现象,任由该情况愈演愈烈,只会降低同学们对于图书馆管理的好感度,降低同学们的阅读热情,据了解,大部分同学对该状况极为反感,但该现象目前没有较好的解决方案,只能听之任之或被迫成为“长期霸座”的一员。为此,我们提出一种智能书桌机器人。
发明内容
本发明的目的在于提供一种智能书桌机器人,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种智能书桌机器人,包括支撑架,所述支撑架上活动设置有桌板,所述支撑架上设置有驱动桌板进行倾斜以收纳书本的转动机构,所述转动机构下方设置有输送机构,对书本进行收集和输送,便于后续整理,所述支撑架上设置有整理机构,以整理书本且进行暂存,便于后续学生拿取,此智能书桌机器人,区别于现有技术,当检测到书桌长时间没有人使用时,能够通过转动机构来使桌板倾斜,使书本进入到输送机构,然后再通过整理机构,将书本进行收纳整理,最后放入到暂存板上,使得书桌可以空出来供其他学生使用,避免了因占座产生的纠纷,也不会对学生的书本造成损坏。
优选的,所述转动机构包括设置在桌板和支撑架之间的第一电动推杆,以驱使桌板由水平状态转换为倾斜状态,通过电动推杆的伸缩来控制桌面的姿态。
优选的,所述输送机构包括设置在桌板底部的输送箱,所述输送箱两侧固定有支撑杆,所述支撑杆与支撑架固定连接,所述输送箱底部开设有若干工作槽,所述输送箱底部设置有传动组件,以对输送箱内的书本进行输送,所述支撑架上固定有安装板,所述安装板上设置有驱动组件,以驱使传动组件对书本进行输送,所述输送箱底部设置有张紧组件,以保证驱动组件持续使用。
优选的,所述驱动组件包括设置在安装板上的第一驱动电机,所述第一驱动电机输出端固定有驱动轴,所述驱动轴端部设置有带轮,所述驱动轴和带轮设置有多组,所述带轮外侧设置有皮带,以使多组驱动轴同步运动,所述输送箱底部固定有辅助板,所述驱动轴转动贯穿辅助板。
优选的,所述输送箱内设置有导向块,以引导书本按照正确轨迹移动,所述导向块上设置有滚柱,以减小书本与导向块之间的摩擦力,使其移动更加顺畅。
优选的,所述传动组件包括设置在驱动轴外侧的转动杆,所述转动杆端部固定有支撑块,通过支撑块的转动对书本进行移动支撑,以实现书本在输送箱内的输送,通过转动板转动带动支撑块转动,带动书本在输送箱内前进直至输送通道内。
优选的,所述张紧组件包括设置在输送箱底部的伸缩杆,所述伸缩杆端部通过转动轴和轴承座设置有张紧轮,所述伸缩杆外侧设置有两端分别与输送箱和轴承座固定的压缩弹簧,以驱使张紧轮对皮带进行张紧,保证驱动组件稳定持续的使用。
优选的,所述整理机构包括设置在输送箱底部一侧的输送通道,所述支撑架上设置有放置板,所述输送箱上固定设置有连接板,所述连接板上设置有第二驱动电机,所述第二驱动电机输出端设置有偏心轴,所述偏心轴外侧安装有驱动盘,所述放置板上固定有竖杆,所述竖杆端部设置有导向板,所述导向板内活动设置有活动杆,所述活动杆靠近驱动盘的一端固定设置有传动板,所述活动杆另一端固定设置有整理板,所述活动杆外侧设置有两端分别与整理板和传动板固定的复位弹簧,所述支撑架上设置有暂存组件。
优选的,所述暂存组件包括固定设置在支撑架上的L板,所述L板上安装有第二电动推杆,所述第二电动推杆端部固定设置有推板,所述放置板一侧设置有暂存板,所述支撑架上设置有舱门,通过打开舱门拿取暂存板上的书本。
与现有技术相比,本发明的有益效果是:
1、本发明,当检测到书桌长时间没有人使用时,能够通过转动机构来使桌板倾斜,使书本进入到输送机构,将桌面进行清理,不影响下一个学生的使用。
2、本发明,通过整理机构,将书本进行收纳整理,最后放入到暂存板上,使得书桌可以空出来供其他学生使用,避免了因占座产生的纠纷,也不会对学生的书本造成损坏。
附图说明
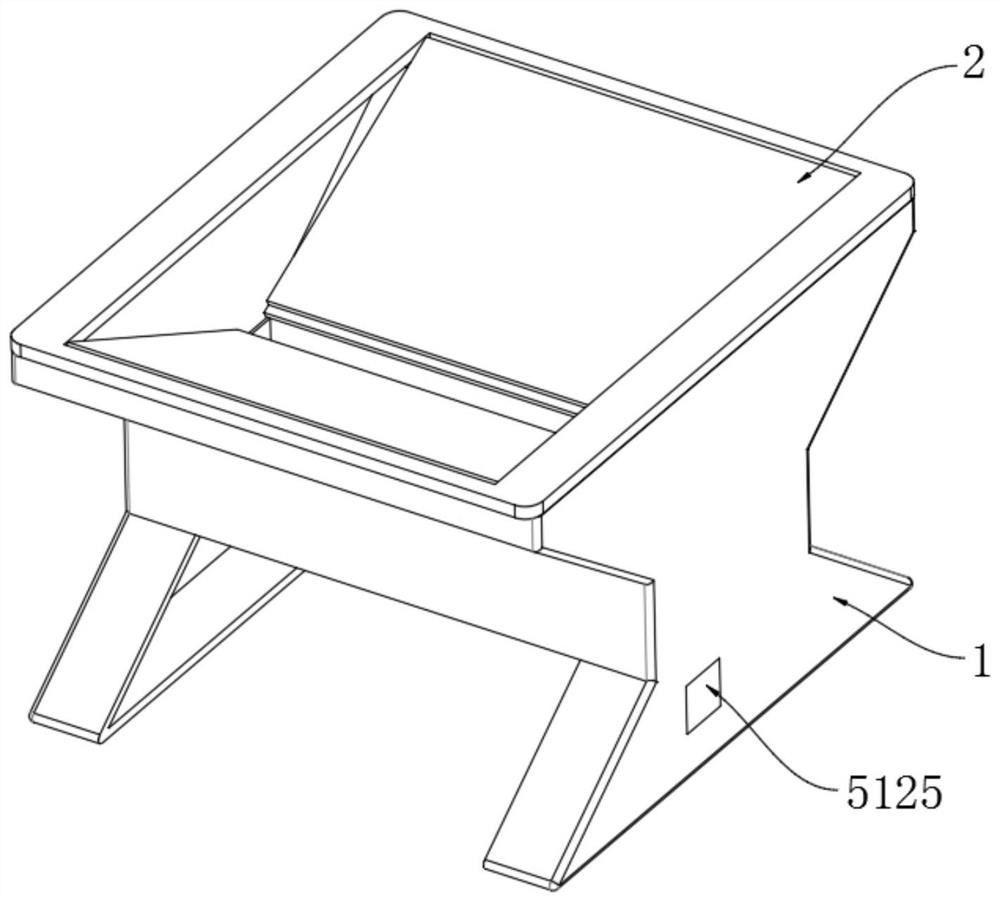
图1为本发明整体结构示意图;
图2为本发明图1另一方位结构示意图;
图3为本发明侧面剖视结构示意图;
图4为本发明图3局部剖视结构示意图;
图5为本发明图4另一方位结构示意图;
图6为本发明局部剖视结构示意图。
图中:1-支撑架;2-桌板;3-转动机构;31-第一电动推杆;4-输送机构;41-输送箱;42-支撑杆;43-工作槽;44-传动组件;441-转动杆;442-支撑块;45-安装板;46-驱动组件;461-第一驱动电机;462-驱动轴;463-带轮;464-皮带;465-辅助板;466-导向块;467-滚柱;47-张紧组件;471-伸缩杆;472-张紧轮;473-压缩弹簧;5-整理机构;51-输送通道;52-放置板;53-连接板;54-第二驱动电机;55-偏心轴;56-驱动盘;57-竖杆;58-导向板;59-活动杆;510-传动板;511-整理板;512-暂存组件;513-复位弹簧;5121-L板;5122-第二电动推杆;5123-推板;5124-暂存板;5125-舱门。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:一种智能书桌机器人,包括支撑架1,所述支撑架1上活动设置有桌板2,所述支撑架1上设置有驱动桌板2进行倾斜以收纳书本的转动机构3,所述转动机构3下方设置有输送机构4,对书本进行收集和输送,便于后续整理,所述支撑架1上设置有整理机构5,以整理书本且进行暂存,便于后续学生拿取,通过转动机构3带动桌板2倾斜,将书本进行收纳,然后通过输送机构4和整理机构5对书本进行整理,在不损坏上一位使用者书本的同时不影响后面的人的使用。
所述转动机构3包括设置在桌板2和支撑架1之间的第一电动推杆31,以驱使桌板2由水平状态转换为倾斜状态,在书桌检测到长时间没有人使用时,第一电动推杆31收缩,带动桌板2倾斜,使得原来在桌面上的书本进入到输送箱41内,然后第一电动推杆31复位,使得桌板2恢复水平,可以供后续的学生使用。
所述输送机构4包括设置在桌板2底部的输送箱41,所述输送箱41两侧固定有支撑杆42,所述支撑杆42与支撑架1固定连接,所述输送箱41底部开设有若干工作槽43,所述输送箱41底部设置有传动组件44,以对输送箱41内的书本进行输送,所述支撑架1上固定有安装板45,所述安装板45上设置有驱动组件46,以驱使传动组件44对书本进行输送,所述输送箱41底部设置有张紧组件47,以保证驱动组件46持续使用。
所述驱动组件46包括设置在安装板45上的第一驱动电机461,所述第一驱动电机461输出端固定有驱动轴462,所述驱动轴462端部设置有带轮463,所述驱动轴462和带轮463设置有多组,所述带轮463外侧设置有皮带464,以使多组驱动轴462同步运动,所述输送箱41底部固定有辅助板465,所述驱动轴462转动贯穿辅助板465,第一驱动电机461启动,通过驱动轴462、带轮463以及皮带464的使用,带动转动杆441转动,进而通过支撑块442带动书本逐渐前进至输送通道51。
所述输送箱41内设置有导向块466,以引导书本按照正确轨迹移动,所述导向块466上设置有滚柱467,以减小书本与导向块466之间的摩擦力,使其移动更加顺畅。
所述传动组件44包括设置在驱动轴462外侧的转动杆441,所述转动杆441端部固定有支撑块442,通过支撑块442的转动对书本进行移动支撑,以实现书本在输送箱41内的输送。
所述张紧组件47包括设置在输送箱41底部的伸缩杆471,所述伸缩杆471端部通过转动轴和轴承座设置有张紧轮472,所述伸缩杆471外侧设置有两端分别与输送箱41和轴承座固定的压缩弹簧473,以驱使张紧轮472对皮带464进行张紧。
所述整理机构5包括设置在输送箱41底部一侧的输送通道51,所述支撑架1上设置有放置板52,所述输送箱41上固定设置有连接板53,所述连接板53上设置有第二驱动电机54,所述第二驱动电机54输出端设置有偏心轴55,所述偏心轴55外侧安装有驱动盘56,所述放置板52上固定有竖杆57,所述竖杆57端部设置有导向板58,所述导向板58内活动设置有活动杆59,所述活动杆59靠近驱动盘56的一端固定设置有传动板510,所述活动杆59另一端固定设置有整理板511,所述活动杆59外侧设置有两端分别与整理板511和传动板510固定的复位弹簧513,所述支撑架1上设置有暂存组件512,书本经过输送通道51掉落在放置板52上,第二驱动电机54通过偏心轴55带动驱动盘56对传动板510进行挤压,通过复位弹簧513实现整理板511反复的推进,对依次落下来的书本进行整理。
所述暂存组件512包括固定设置在支撑架1上的L板5121,所述L板5121上安装有第二电动推杆5122,所述第二电动推杆5122端部固定设置有推板5123,所述放置板52一侧设置有暂存板5124,所述支撑架1上设置有舱门5125,通过打开舱门5125拿取暂存板5124上的书本,通过第二电动推杆5122带动推板5123将整理后的书本送入到暂存板5124上进行暂存,学生可以通过打开舱门5125来拿取书本。
工作原理:在书桌检测到长时间没有人使用时,第一电动推杆31收缩,带动桌板2倾斜,使得原来在桌面上的书本进入到输送箱41内,然后第一电动推杆31复位,使得桌板2恢复水平,可以供后续的学生使用,然后第一驱动电机461启动,通过驱动轴462、带轮463以及皮带464的使用,带动转动杆441转动,进而通过支撑块442带动书本逐渐前进至输送通道51,书本经过输送通道51掉落在放置板52上,第二驱动电机54通过偏心轴55带动驱动盘56对传动板510进行挤压,通过复位弹簧513实现整理板511反复的推进,对依次落下来的书本进行整理,最后通过第二电动推杆5122带动推板5123将整理后的书本送入到暂存板5124上进行暂存,学生可以通过打开舱门5125来拿取书本。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种智能书桌机器人
- 一种智能家居用多功能智能书桌