一种电动升降桌
文献发布时间:2023-06-19 11:45:49
技术领域:
本发明属于办公家具领域,特别涉及一种电动升降桌,尤其是可叠加于固定桌面或物体上,作为调节高度的升降桌。
背景技术:
随着科技进步,计算机占领各个领域,即使在休闲环境也离不开。由于使用环境各式各样,为了兼容不同使用条件,又能满足更人性化的操作和观察角度,业者创造了不少需求。如:
专利申请号201720358005.0,公开一种电动无噪音桌面升降装置,包括一支撑机构,支撑机构包括底座,底座后部的两侧端分别设有一支架,支架的侧端设有轨道;一承载机构,承载机构包括桌面,桌面上设有一电机开关;一活动机构,包括一左一右对称设置的支撑组,支撑组由前斜支撑杆与后斜支撑杆组成,且前斜支撑杆与后斜支撑杆交叉活动连接形成的“X”状结构,后斜支撑杆的底端在轨道内滑动,一左一右设置的前斜支撑杆的上端之间设有连接杆,一左一右设置的后斜支撑杆的上端之间设有轴杆;一电动驱动机构,电动驱动机构置于轴杆以及连接杆之间,电动驱动机构与电机开关连接。该结构利用电机和驱动杆组合,也即电动推杆或电机及双头螺杆驱动,实现X交叉支撑杆夹角和高度的变化调节,但因X交叉支撑杆在桌面最低位时,前、后支撑杆接近于平行,不但容易卡死,而且需要较大的牵引力量,因此设计时保持两支撑杆具有一定的初始角度,这也导致升降桌无法做的薄。
再如:专利申请号201821378743.2,也是同样原理,只是交叉式升降臂的动作方向不同而已,前者为前后方向动作,而后者为左右方向动作,其它类同,同样存在厚度过厚的缺陷。
如何改善现有的缺陷,即成为本发明研究的方向。
发明内容:
本发明的目的是设计一种电机总成的一个驱动行程,驱动两套机构无缝切换,初始由斜撑臂抬升桌面,而后转换驱动两交叉支撑臂继续升高的电动升降桌。
本发明技术方案是这样实现的:一种电动升降桌,包括底座、桌面、两交叉铰接的支撑臂和电机总成;所述桌面由两所述支撑臂支撑在底座上,两所述支撑臂一端为固定端,对应铰接在底座和桌面上,另一端为活动端,采用滑动定位在底座和桌面的对应长滑槽中,所述电机总成包括电机组件和由电机组件驱动旋转的螺杆,电机组件和螺杆的端部对应连接在支撑臂的固定端和活动端上,并由电机总成驱动桌面的升降动作;其特征在于:螺杆两端通过横轴定位在桌面或底座的短滑槽中,所述横轴上定位有斜撑臂,斜撑臂下端部能抵触在底座或桌面设置的挡块上;所述螺杆上旋设有带牵引臂的螺母座,该牵引臂与所述支撑臂的活动端连接。
所述电机组件锁固在桌面或底座上,电机组件的输出轴与螺杆间通过花键套筒轴接,在传递动力的同时允许螺杆轴向移动。
所述底座为一矩形框,前后两边框上设置有长滑槽,左右两侧各设置有挡块;桌面为平面结构,电机总成安装在桌面背部,并在桌面背面还锁固有长滑槽、短滑槽;所述桌面正面上设置有控制电机总成的按键区,桌面并能盖合在底座的边框上。
所述桌面和底座的前后侧各设置有一对交叉铰接的支撑臂,两对所述支撑臂为同步动作,两支撑臂向下的活动端通过一长轴连接,长轴两端分别枢接在底座的长滑槽中;两支撑臂向上的活动端通过各自的短轴枢接在一对锁固在桌面背部的长滑槽中,所述短轴上还枢接有牵引臂。
所述电机总成设置在桌面前后之间的居中位置,在螺杆两端的两侧各设置一对短滑槽和一对斜撑臂,并由横轴两端部枢接在两短滑槽中,所述螺杆两端分别穿过对应的横轴中心孔,两者成十字交叉并约束横轴沿螺杆轴向的运动;在电机组件一端的两侧还各设置一对短滑槽、并枢接有横轴,该短滑槽上的横轴与处于螺杆端部的横轴间设置有联动板,使同端的两横轴同步,并在电机组件两侧的横轴上枢接有斜撑臂;远离电机组件一端的一对斜撑臂直接枢接在横轴上、且处于螺杆的两侧,由左右两侧的四根斜撑臂共同顶起桌面。
所述底座的前后边框为型材截断而成,左右两侧端部为塑件,通过螺丝锁固在所述边框两端部上,形成底座整体。
本发明巧妙利用一个驱动行程,初始由斜撑臂抬升桌面,并使两交叉铰接的支撑臂交叉夹角变小,驱动力矩变大后,再自由切换至驱动两交叉支撑臂继续升高,既减少支撑臂初始阶段的受力,又可选择更小功率的电机;因此,支撑臂可使用更薄和轻的铝合金,设计时两交叉支撑臂的最大夹角也能接近180度,使得桌面能贴合在底座上,收折后整体更轻薄。
附图说明:
下面结合具体图例对本发明做进一步说明:
图1为电动升降桌折叠后示意图
图2为电动升降桌升高后示意图
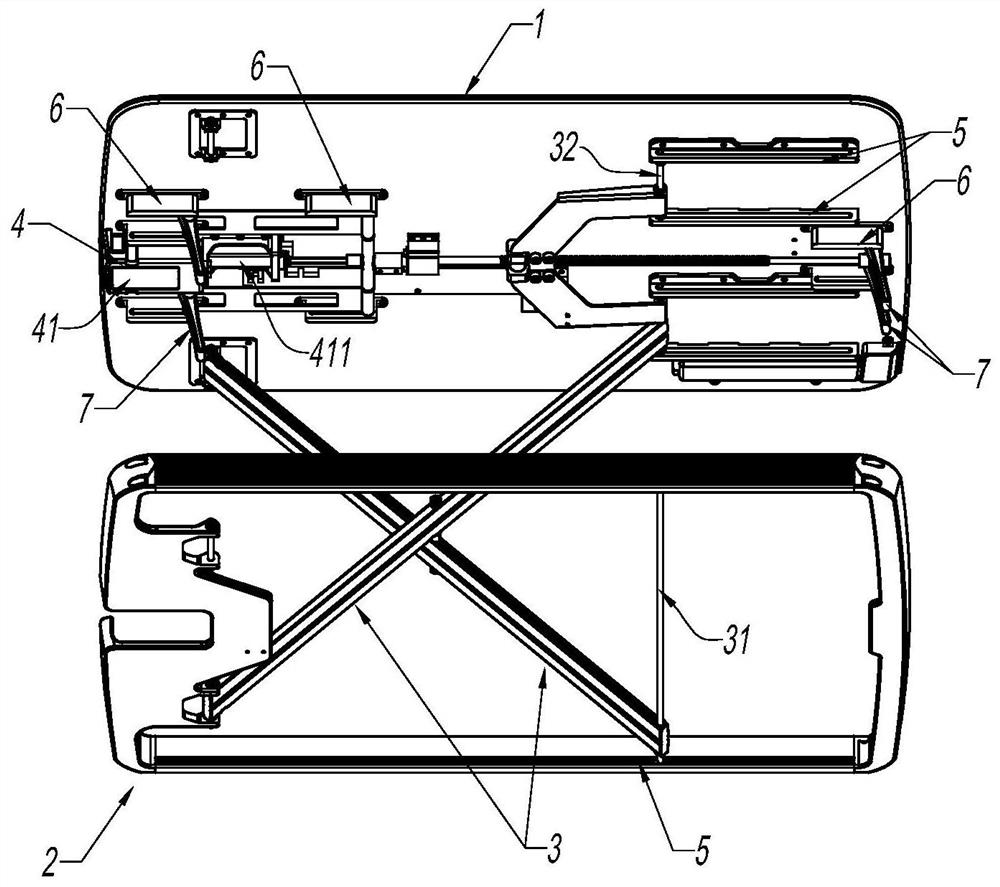
图3为电动升降桌升高仰角示意图
图4为电动升降桌分解示意图
其中
1—桌面 11—按键区 2—底座 21—边框
22—塑件 23—铰接座 24—挡块 3—支撑臂
31—长轴 32—短轴 4—电机总成 41—电机组件
411—输出轴 42—螺杆 43—螺母座 44—横轴
441—中心孔 45—牵引臂 46—联动板 5—长滑槽
6—短滑槽 7—斜撑臂
具体实施方式:
参照图1至图4,电动升降桌,包括桌面1、底座2、支撑臂3和电机总成4;桌面1由两对交叉铰接在支撑臂3支撑在底座2上,两交叉的支撑臂3一端为固定端,对应铰接在底座2和桌面1上,另一端为活动端,采用滑动定位在底座2和桌面1的对应长滑槽5中,支撑臂3借助活动端在长滑槽5中位置的变化,实现桌面1高度的调节。
底座2为一矩形框,前后边框21为型材截断而成,左右两侧端部为塑件22,通过螺丝锁固在边框21两端部上,形成底座2整体。底座前后两边框21上的长滑槽5,直接在型材拉伸时成型出。利用塑件22制作时,成型有支撑臂固定端的铰接座23和左右两侧的挡块24。
桌面1为平面结构,电机总成4安装在桌面背部,并在桌面背面还锁固有长滑槽5、短滑槽6,桌面1正面上设置有控制电机总成的按键区11,桌面1能盖合在底座的边框21上,形成整体。
更具体地说,桌面1和底座2的前后侧各设置有一对交叉铰接的支撑臂3,两对支撑臂为同步动作,两支撑臂3向下的活动端通过一长轴31连接,长轴31两端分别枢接在底座的长滑槽5中;两支撑臂3向上的活动端通过各自的短轴32枢接在一对锁固在桌面背部的长滑槽5中,短轴32上还枢接有牵引臂45,以牵引支撑臂3的活动端。
电机总成4,包括电机组件41、螺杆42和螺母座43;电机组件41优选步进电机,也可采用普通电机和变速箱组合;由电机组件驱动螺杆42旋转,电机组件41和螺杆42的端部对应连接在支撑臂3的固定端和活动端,驱动两交叉铰接支撑臂3间夹角的变化,实现桌面1的升降调节。电机组件41锁固在桌面1上,电机组件的输出轴411与螺杆42间通过花键套筒轴接,在传递动力的同时允许螺杆42轴向移动。
螺杆42两端通过横轴44定位在桌面1背部的短滑槽6中,横轴44上还定位有斜撑臂7,斜撑臂7下端部能抵触在底座2上设置的挡块24上;螺母座43旋设在螺杆42上,并与牵引臂45相固定,藉由牵引臂45与支撑臂3的活动端连接。
桌面的抬升过程,也是驱动力矩与重力力矩变化的过程,在桌面1抬升初始,驱动力矩小而重力力矩大,对于恒定功率的电机来说,初始动作负荷较大,为此抬升初始动作是此类交叉支撑臂驱动的一个难点。电机组件41驱动螺杆42旋转,螺母座43受力,此时由于两交叉支撑臂3夹角接近180度,螺杆42轴向驱动力与支撑臂3接近平行,驱动力矩小,支撑臂3的活动端无动作,反作用力迫使螺杆42沿轴向移动,带动两端的横轴44沿短滑槽6移动;而定位在横轴上的斜撑臂7的下端部被挡块24顶住,且斜撑臂7的初始力矩大,受力后以下端部为支点翻转,将桌面1连同电机总成4抬升起;当横轴44移动至短滑槽6端部,螺杆42无法移动时,驱动力全部作用于螺母座43上,此时由于桌面1抬升一定高度,而使两交叉的支撑臂3夹角变小,力矩增大能较轻松地将支撑臂3的活动端往固定端一侧拉拢,桌面逐渐抬升至需要高度。而由斜撑臂7和支撑臂3自由切换是本结构最大的特点之一。
进一步,电机总成4设置在桌面前后之间的居中位置,在螺杆42两端的两侧各设置一对短滑槽6和一对斜撑臂7,并由横轴44两端部枢接在两短滑槽6中,螺杆42两端分别穿过对应的横轴中心孔441,两者成十字交叉并约束横轴44沿螺杆轴向的运动,也就是说横轴44允许螺杆42自由旋转,而横轴自身不能沿螺杆轴向移动;在电机组件41一端的两侧还各设置一对短滑槽6、并枢接有横轴44,该短滑槽上的横轴与处于螺杆41端部的横轴44间设置有联动板46,使同端的两横轴44同步,并在电机组件41两侧的横轴上枢接有斜撑臂7;远离电机组件一端的一对斜撑臂7直接枢接在横轴44上、且处于螺杆42的两侧,由左右两侧的四根斜撑臂7共同顶起桌面1,也可以说即使在初始状态,也能具有平稳的支撑。
通过该结构,将一对斜撑臂7往桌面一侧转移,避免太过于居中而给底座上的挡块设置带来麻烦,这样避让后底座2中部能形成更大的镂空空间。
另外,桌面1和底座2为对应的两面,本实例中电机总成4锁固在桌面背部,由于桌面为完整平面,能形成必要的遮罩;当然也可与底座2互换,将电机总成4设计在底座一侧,除了美观外,效果一样。上述涉及的斜撑臂7只是形象说明其与施力方向具有初始角度,除了图例外,其也可为楔形块、弧形臂,或者施力点和着力点处于斜线上的矩形块。
- 一种电动升降桌的控制系统及电动升降桌
- 一种电动升降桌控制器及电动升降桌