一种医用注射机器人的针头更换装置
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及一种医疗机器人领域,尤其是涉及一种医用注射机器人的针头更换装置。
背景技术
面对大范围流行性疾病,注射疫苗等方式能够有效遏制疾病的传播与发展,但现有人工注射方式效率低下且安全性差,易造成交叉感染、医护人员感染等情况。而医疗注射机器人是这种情况下的一种十分有效的解决方案。但在具体运用中,对于针头的取、放、更换,仍然需要人工进行,每进行一次注射之后,都需要对针头进行人工更换,这样的方式增加了医护人员的工作量,也无形中增加了安全隐患,而这有悖于机器人设计的初衷。同时,在医疗实践中,对于不同类型的注射剂以及不同病人的生理条件,需要选择不同的针头,但目前大部分医疗机器人的针头都是特制的,这样不仅增加了成本,并且在实际应用场景中的限制较大,在应对紧急突发医疗事件时,无法与人工注射进行很好的协同,缩小了其应用范围。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种医用注射机器人的针头更换装置,适配不同规格的现有针头、使用操作方便且有效避免交叉感染。
本发明的目的可以通过以下技术方案来实现:
一种医用注射机器人的针头更换装置,包括壳体、注射模块和针头供应模块;所述壳体内设有水平设置的滑轨,所述注射模块安装在滑轨上,所述注射模块的前端设有针头连接部,尾端设有第一驱动单元,所述壳体的前端设有出针孔,该出针孔正对针头连接部;所述针头供应模块安装在滑轨的前端下方,包括针头存放腔、针头和针头驱动单元,所述针头存放腔的顶部设有供应槽,所述针头驱动单元用于推动针头从供应槽露出,此时针头与出针孔和针头连接部的中心连线共线,所述注射模块在第一驱动单元的带动下沿着滑轨移动使针头和针头连接部相连;在出针孔的一侧设有单向卡扣用于连接针头。
进一步地,所述针头供应模块中,所述针头存放腔包括外支架、柔性内支架和弹簧,所述针头驱动模块包括旋转驱动电机、挡板、伸缩驱动机构和旋转挡块,所述柔性内支架和外支架同轴线设置组成圆柱环腔体用于放置针头,弹簧均匀分布在柔性内支架和外支架之间,所述旋转驱动电机设置在圆柱环腔体的轴线上,在柔性内支架上设有圆环槽,所述挡板的一端连接旋转驱动电机,另一端穿过圆环槽用于推动针头,所述供应槽设置在外支架的顶端,所述旋转挡块一端铰接在供应槽一侧下方,另一端滑动铰接伸缩驱动机构。
进一步地,所述旋转挡块为向下弯曲圆弧件。
进一步地,所述伸缩驱动机构包括套筒和复位弹簧,套筒的一端连接旋转驱动电机的壳体,另一端滑动铰接旋转挡块,复位弹簧套在套筒内杆上。
进一步地,所述第一驱动单元包括第一齿条和第一电机,所述第一齿条的一端连接注射模块,第一电机固定在壳体内,通过齿轮连接第一齿条。
进一步地,所述单向卡扣包括卡扣支架和卡板,所述卡板一端铰接卡扣支架,所述卡扣支架上设有限位角用于限制卡板的最大张开角度,并且卡扣支架和卡板间设有扭簧;所述针头的尾端设有卡槽用于嵌合卡板。
进一步地,还包括独立设置的针头回收模块,所述针头回收模块包括回收固定端和回收腔,所述回收固定端上设有旋转卡扣和回收电机,旋转卡扣通过回收电机连接回收固定端,和回收固定端组成夹持机构用于夹持针头,所述回收腔通过斜坡面连接回收固定端,当夹持机构松开针头时,针头沿着斜坡面滚入回收腔;使用时,回收固定端紧贴壳体的出针孔。
进一步地,所述注射模块包括注射腔、活塞、进药口和第二驱动单元,所述进药口设置在注射腔的前端,互相连接的活塞和第二驱动单元设置在注射腔内。
进一步地,所述第二驱动单元包括第二齿条和第二电机,所述第二齿条的一端连接活塞,第二电机固定在注射腔的后端,通过齿轮连接第二齿条。
进一步地,所述活塞和第二电机之间设有限位板,该限位板中设有通孔用于穿过第二齿条。
与现有技术相比,本发明具有以下有益效果:
(1)本发明由注射模块和针头供应模块等组合而成,结构简单,操作方便,而且便于拆卸检查、后期维护和消毒杀菌,极大提高了使用寿命。
(2)针头供应模块通过柔性内支架、外支架和弹簧的结构可以实现尺寸自适应,可以适配不同规格的针头,对条件要求较低,可运用于多种场景,与人工协同方便,对紧急突发事件具有快速响应能力。
(3)本发明设计了独立的针头回收模块,不会和装置本体互相影响,确保了被污染的针头不会污染注射模块,而是直接被回收,避免了交叉感染,极大降低了风险隐患。
附图说明
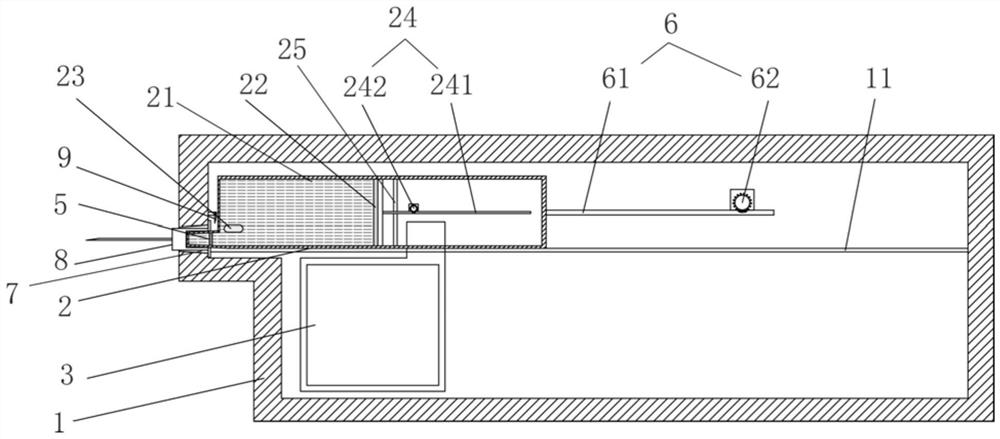
图1为本发明的结构示意图。
图2为针头供应模块的结构示意图。
图3是单向卡扣的结构示意图。
图4是针头回收模块的结构示意图。
附图标记:
1-壳体;11-滑轨;
2-注射模块;21-注射腔;22-活塞;23-进药口;24-第二驱动单元;241-第二齿条;242-第二电机;25-限位板;
3-针头供应模块;31-外支架;32-柔性内支架;33-弹簧;34-驱动电机;35-挡板;36-伸缩驱动机构;361-套筒;362-复位弹簧;37-旋转挡块;38-供应槽;
4-针头回收模块;41-回收固定端;42-回收腔;43-旋转卡扣;44-回收电机;
5-针头连接部;
6-第一驱动单元;61-第一齿条;62-第一电机;
7-出针孔;
8-针头;
9-单向卡扣;91-卡扣支架;92-卡板。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
本实施例提供了一种医用注射机器人的针头更换装置,包括壳体1,设置在壳体1内的注射模块2、针头供应模块3,以及独立设置的针头回收模块4。
如图1所示,壳体1内设有水平设置的滑轨11,注射模块2安装在滑轨11上。注射模块2的前端连接设有针头连接部5,尾端设有第一驱动单元6。壳体1的前端设有出针孔7,该出针孔7正对针头连接部5,用于穿过针头8。针头供应模块3安装在滑轨11的前端下方,包括针头存放腔、针头8和针头驱动单元。针头存放腔的顶部设有供应槽,针头驱动单元用于推动针头8从供应槽露出,此时针头8与出针孔7和针头连接部5的连线共线。第一驱动单元6包括第一齿条61和第一电机62,所述第一齿条61的一端连接注射模块2,第一电机62固定在壳体1内,通过齿轮连接第一齿条61。注射模块2在第一驱动单元6的带动下沿着滑轨11移动使针头8和针头连接部5相连,并且将针头8从出针孔7推出。在出针孔7的一侧设有单向卡扣9用于连接针头8。
注射模块2包括注射腔21、活塞22、进药口23和第二驱动单元24。进药口23设置在注射腔21的前端,互相连接的活塞22和第二驱动单元24设置在注射腔21内。第二驱动单元24包括第二齿条241和第二电机242,第二齿条241的一端连接活塞22,第二电机242固定在注射腔21的后端,通过齿轮连接第二齿条241。活塞22和第二电机242之间还设有限位板25,该限位板25中设有通孔用于穿过第二齿条241。也就是说,限位板25将注射腔21分为左右两部分,左部分为药物注射腔21,右部位空腔用于容纳第二齿条241。活塞22直径略小于注射腔21的内径,应具有良好的密闭性,进药口23也应具备良好的密闭性,便于到达指定位置后送药过程准确无遗漏。注射腔21前端的针头连接部5还可以设有量检测器,返回流量信号,通过程序检测反馈第二电机242的转速。为保证结构稳定性,齿条A10的连接点应在活塞228中心,同时采用必要的加固措施。
如图2所示,在针头供应模块3中,针头存放腔包括外支架31和柔性内支架32,内支架和外支架31同轴线设置组成圆柱环腔体用于放置针头8,并且弹簧33设置在柔性内支架32和外支架31之间保证圆柱环腔体的间隙能够自由调整。间隙的初始状态略小于最小尺寸的针头8,当针头8位于间隙内后,使弹簧33略微拉伸。此处弹簧33的刚度与柔性内支架32外侧的摩擦系数、外支架31内侧的摩擦系数应恰好匹配,即保证针头8在挡板35的推动下能够顺利旋转。针头驱动模块包括旋转驱动电机34、挡板35、伸缩驱动机构36和旋转挡块37。旋转驱动电机34设置在圆柱环腔体的轴线上,在内支架上设有圆环槽,挡板35的一端连接旋转驱动电机34,另一端穿过圆环槽用于推动针头8。挡板35在旋转驱动电机34的带动下在圆环槽内移动从而推动圆柱环腔体内部的针头8。供应槽38设置在外支架31的顶端,旋转挡块37一端铰接在供应槽38一侧下方,另一端滑动铰接伸缩驱动机构36。伸缩驱动机构36采用套筒361和复位弹簧362的结构,套筒361的一端连接旋转驱动电机34的壳体1,另一端滑动铰接旋转挡块37,复位弹簧362套在套筒361内杆上。由此在挡板35的驱动下将针头8将逆时针旋转推动旋转挡块37,旋转挡块37压缩复位弹簧362让针头8移动到旋转挡块37上,之后复位弹簧362回弹会使得旋转挡块37逆时针旋转从而带动针头8从供应槽38露出。为保证针头8顺利推出间隙,应保证旋转挡块37表面的光洁度以及复位弹簧362的刚度。
如图3所示,单向卡扣9包括卡扣支架91和卡板92。卡扣支架91安装在壳体1内并且位于出针孔7的一侧。卡板92一端铰接卡扣支架91,在卡扣支架91上设有限位角用于限制卡板92的最大张开角度。同时,卡扣支架91和卡板92间设有扭簧,确保卡板92张开角度的初始力。针头8的尾端设有卡槽用于嵌合卡板92。由此,当针头8在注射模块2的带动下沿着滑轨11移动从出针孔7推出后,其尾部的卡槽被卡板92限制住。
如图4所示,独立设置的针头回收模块4包括回收固定端41和回收腔42。回收固定端41上设有旋转卡扣43和回收电机44,旋转卡扣43通过回收电机44连接旋转支架,和旋转支架组成夹持机构用于夹持针头8。回收腔42通过斜坡面连接回收固定端41,当夹持机构松开针头8时,针头8沿着斜坡面滚入回收腔42;使用时,回收固定端41紧贴壳体1的出针孔7。回收电机44为例不阻碍针头8掉落可以在不影响稳定性的前提下适当外移。
本实施例的工作原理如下:
注射模块2位于滑轨11最右端,此时针头8位于从针头供应模块3的供应槽38中伸出,第一电机62工作,带动第一齿条61向左移动,第一齿条61推动注射模块2沿滑轨11左移。使得注射模块2上的针头连接部5和针头8结构,共同继续沿着滑轨11移动。接下来,针头8的尾端与单向卡扣9相接触,针头8顺利穿过出针孔7。药物沿进药口23流入注射腔21,此时第二电机242并没有工作,随着药液充满,活塞22逐渐右移。接下来,第二电机242通过第二齿条241推动活塞22向左移动,药液流经流量监测器流入针头8,流量监测器5实时反馈流量流速,一旦出现异常将反馈至第二电机242,从而控制流速。
注射结束后,首先将壳体1的出针孔7和针头回收模块4贴合,将针头8穿过针头回收模块4的夹持机构并且固定。然后第二电机242带动第二齿条241与活塞22向右复位,第一电机62带动第一齿条61于注射模块2向右复位,此时针头8被单向卡扣9限制无法一同向右移动,从而和注射模块2脱离。之后,回收电机44开始工作,回收电机44带动旋转卡扣43解除对针头8的固定,使其沿回收腔42的滑道顺利脱离。
当注射腔21模块完全复位后,第一电机62停止工作,然后针头供应模块3开始工作。针头8被柔性内支架32与外支架31固定在间隙中,随着旋转驱动电机34的转动,挡板35随之转动,从而推动针头84转动,使得最上方的针头8对旋转挡块37形成挤压,从而旋转挡块37挤压复位弹簧362,最终又因为复位弹簧362的回弹力被顶出供应槽38,从而重复上述过程,实现连续多次注射自动换针,无需人工干预。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种医用注射机器人的针头更换装置
- 一种配合医用注射针筒使用的集成注射针头的装置