家电设备、家电系统,评价方法以及评价基准生成方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明的实施方式涉及家电设备、家电系统、评价方法以及评价基准生成方法。
背景技术
在家电设备中存在例如吸尘器这样由用户来驱动从而使用的设备。吸尘器中设有对从头部被吸引的垃圾(尘埃)进行感测的垃圾传感器。吸尘器是否被高效地使用是基于垃圾传感器的感测结果来判断的。但是,存在仅基于由垃圾传感器感测到尘埃的吸引量难以判断吸尘器是否被高效地使用的情况。
现有技术文献
专利文献
专利文献1日本特开2019-188238号公报
发明内容
发明所要解决的问题
本发明所要解决的问题是提供一种能够通过对由用户操作的家电设备的动作进行检测来高精度地判断用户是否正在高效地使用家电设备的家电设备、家电系统、评价方法以及评价基准生成方法。
用于解决问题的方案
实施方式的家电设备是根据用户的操作来进行动作从而发挥规定的功能的家电设备。上述家电设备具有动作检测部。上述动作检测部对被上述用户操作的上述家电设备的动作进行检测。
发明效果
根据本发明,能够判断用户是否正在高效的使用家电设备。
附图说明
图1是表示第一实施方式的吸尘器的整体构成的立体图。
图2是表示吸尘器的头部的立体图。
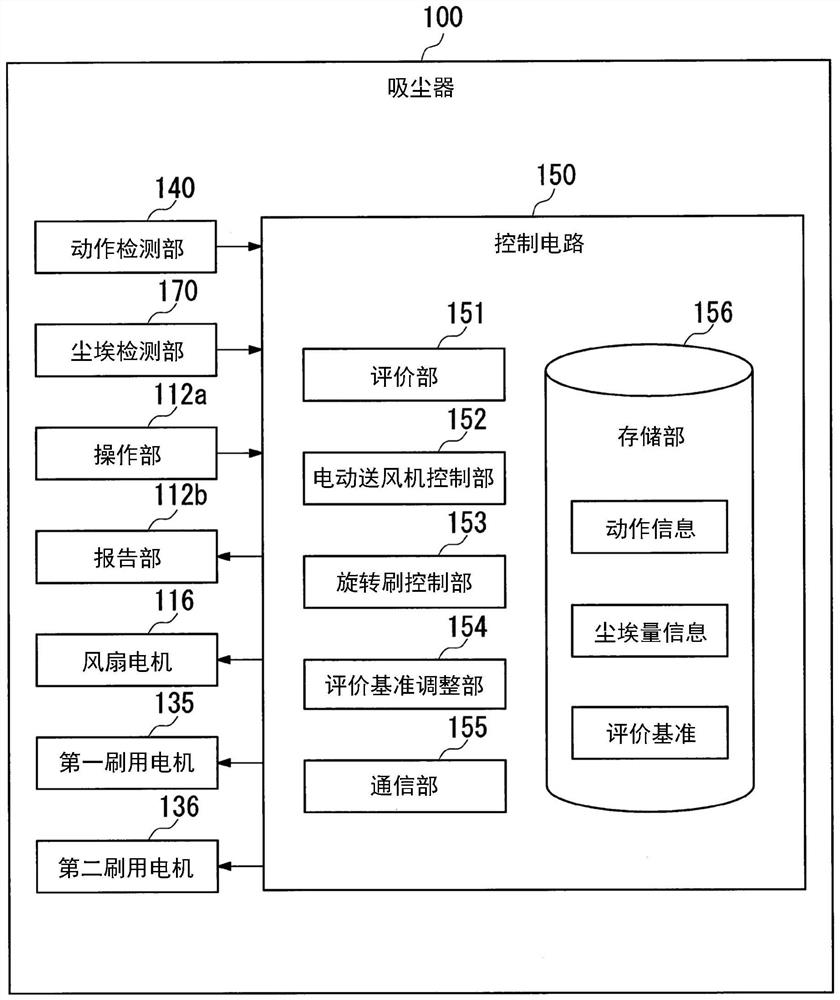
图3是表示吸尘器的功能构成的框图。
图4是对被评价部使用的学习模型进行说明的图。
图5是示意地表示学习模型中使用的神经网络的一部分的图。
图6为表示评价控制模式下的处理的流程图。
图7是表示评价基准的调整处理的流程图。
图8是表示家电系统的构成的一个例子的图。
图9是表示信息处理装置的功能构成的框图。
图10是表示终端装置的功能构成的框图。
图11是表示终端装置的显示画面的图。
图12是表示清扫地图的画面的图。
图13是表示评价基准的生成处理的流程图。
图中:
10…家电系统,100…吸尘器,112…把持部,112a…操作部,112b…报告部,114…电动送风机,116…风扇电机,120…延长管,130…头部,133…第一旋转刷,134…第二旋转刷,135…第一刷用电机,136…第二刷用电机,140…动作检测部,150…控制电路,151…评价部,152…电动送风机控制部,153…旋转刷控制部,154…评价基准调整部,155…通信部,156…存储部,170…尘埃检测部,180…学习模型,200…信息处理装置,210…评价部,212…评价基准调整部,213…评价基准生成部,214…存储部,300…终端装置,311…报告部,400…智能扬声器
具体实施方式
以下,参照附图对实施方式的家电设备、家电系统、评价方法以及评价基准生成方法加以说明。在以下的说明中,对具有相同或者类似的功能的构成赋予相同的符号。并且,有时省略对这些构成的重复说明。在本说明书中,“基于XX”的意思是“至少基于XX”,还包含除了XX以外基于其他要素的情况。此外,“基于XX”并不限于直接地使用XX的情况,还包含基于对XX进行了运算或加工所得的要素的情况。在本说明书中,“YY1或者YY2”并不限于仅存在“YY1”的情况或者仅存在“YY2”的情况,还包含存在“YY1”以及“YY2”双方的情况。对于这一点,在由“或者”连接的要素为三个以上的情况下也是相同的。在本说明书中,“ZZ1和ZZ2中至少一方”并不限于以“ZZ1”以及“ZZ2”双方存在为前提的情况,还包含仅存在“ZZ1”的情况或者仅存在“ZZ2”的情况。“XX”、“YY1”、“YY2”、“ZZ1”以及“ZZ2”分别是任意的要素(例如任意的信息、功能或者构成)。
在本说明书中,以使用电动吸尘器的用户为基准来定义前后、左右、上下。在本说明书中,“相同”以及“平行”包含“大致相同”以及“大致平行”的情况。在本说明书中,“连接”还包含电气连接的情况。
(第一实施方式)
[1-1.吸尘器的整体构成]图1是表示吸尘器的整体构成的立体图。吸尘器100是根据用户的操作来进行动作从而发挥规定的功能的家电设备的一个例子。吸尘器100例如是所谓杆式电动吸尘器,是内置有作为电源的二次电池115的无线式电动吸尘器。不过,吸尘器100并不限于上述例子,也可以是具有包含车轮的吸尘器主体的桶(canister)式等其他形式的吸尘器。
吸尘器100例如具备吸尘器主体110、延长管120以及头部130。吸尘器主体110例如具有主体外壳111、把持部112、集尘装置113、电动送风机114、二次电池115以及控制电路150。
主体外壳111形成吸尘器主体110的外轮廓。主体外壳111容纳有电动送风机114、二次电池115以及控制电路150。主体外壳111具有供后述的延长管120的一端连接的延长管连接部111a。
把持部112设于主体外壳111的上后端部。把持部112是在使用吸尘器100对被清扫面F进行清扫的情况下被用户把持的部位。把持部112具有受理与吸尘器100的运转相关的用户操作的操作部112a。操作部112a例如包含多个按钮。此外,把持部112具有报告部112b以及动作检测部140。关于报告部112b以及动作检测部140的详细内容将在后文加以记述。
集尘装置113以可拆装的方式装接于主体外壳111。集尘装置113是对通过后述的电动送风机114的工作而被吸入吸尘器主体110的空气中所包含的尘埃进行分离的装置。集尘装置113例如可以是通过使含尘空气旋转来对尘埃进行分离的离心分离式集尘装置,也可以是通过使含尘空气通过过滤器来对尘埃进行分离的过滤式集尘装置。
电动送风机114包含风扇电机和通过风扇电机来实现旋转的叶轮,该电动送风机114被驱动从而产生负压。电动送风机114通过所产生的负压从后述的头部130的吸引口130a将含尘空气吸入至吸尘器主体110的集尘装置113,并将通过集尘装置113分离出尘埃后的空气排气至吸尘器100的外部。
二次电池115将吸尘器100进行动作所需的电力供给至吸尘器100。例如,二次电池115将电力供给至电动送风机114、控制电路150、后述的第一刷用电机135以及第二刷用电机136等。
控制电路150包含设有配线图案的电路基板和安装于电路基板的多个电子零件。这些电子零件例如包含执行计算机程序的CPU(Central Processing Unit:中央处理单元)等硬件处理器、LSI(Large Scale Integration:大规模集成化)、ASIC(ApplicationSpecific Integrated Circuit:专用集成电路)、FPGA(Field-Programmable Gate Array:现场可编程门阵列)、PLD(Programmable Logic Device:可编程逻辑控制器)等中一个以上的零件。
延长管120例如形成为细长形,并具有第一端部120a和第二端部120b。延长管120的第一端部120a气密地连接于吸尘器主体110的延长管连接部111a。延长管120的第二端部120b气密地连接于头部130。在延长管120的内部设有将吸尘器主体110与头部130电连接的连接配线。
头部130是被沿着被清扫面F移动的部分。以下,对本实施方式的头部130详细地加以说明。
[1-2.头部]
图2是表示吸尘器的头部的立体图。头部130例如具有连接管131、外壳132、第一旋转刷133、第二旋转刷134、第一刷用电机135(参照图3)以及第二刷用电机136(参照图3)。
连接管131是将外壳132与延长管120的第二端部120b气密地连接的部分。连接管131以可转动的方式连接于外壳132。外壳132与延长管120通过连接管131连接,由此,形成从外壳132的吸引口130a经由延长管120到达吸尘器主体110的风路。
外壳132形成为横向长即在左右方向上形成为长条形。外壳132在与被清扫面F对置的下部具有吸引口130a。吸引口130a的全部或者大部分朝向下方开口。吸引口130a作为开口部,其通过吸尘器主体110的电动送风机114被驱动这一情况而吸入被清扫面F的尘埃。
第一旋转刷133设于吸引口130a,并沿着被清扫面F配置。第一旋转刷133设于头部130的前端部。第一旋转刷133的长度方向与头部130的长度方向(左右方向)平行。在从下方观察头部130的情况下,第一旋转刷133以从前侧朝向后侧的旋转方向进行旋转。
第二旋转刷134设于吸引口130a,并沿着被清扫面F配置。第二旋转刷134在头部130的前后方向上设于第一旋转刷133的后方。第二旋转刷134的长度方向与第一旋转刷133的长度方向平行。在从下方观察头部130的情况下,第二旋转刷134以从后侧朝向前侧的旋转方向进行旋转。即,第一旋转刷133和第二旋转刷134彼此逆向旋转。另外,无论是在第一旋转刷133和第二旋转刷134同向旋转的情况下,还是在设于头部130的旋转刷为一个的情况下,都能够应用本发明。
[1-3.吸尘器的功能构成]
图3是表示吸尘器的功能构成的框图。吸尘器100具备:动作检测部140、尘埃检测部170、操作部112a、报告部112b、风扇电机116、第一刷用电机135、第二刷用电机136、控制电路150。
动作检测部140具备加速度传感器、陀螺仪传感器,对由用户操作的吸尘器100的头部130的动作进行检测。在本实施方式中,动作检测部140设于把持部112。由此,在吸尘器100被操作时,即使头部130与障碍物碰撞,也能够减少由振动引起的检测精度的下降,并且容易确保传感器的装配所需的强度。但并不限于此,动作检测部140也可以设于头部130。若将动作检测部140设于头部130,则能够通过直接对头部130的移动进行检测这一点来使检测精度提高。此外,动作检测部140可以设于把持部112与头部130之间的连结部件(例如,延长管120)。由此,动作检测部140在避免传感器的破损、检测精度的下降的同时,间接地对头部130的动作进行检测。
动作检测部140基于加速度传感器、陀螺仪传感器的输出,对表示吸尘器100的动作的动作信息进行检测,并将检测到的动作信息输出至控制电路150。动作检测部140以固定的时间间隔进行动作信息的检测以及输出。“动作信息”例如是头部130的速度、加速度、移动方向以及一个动作的移动距离等,但并不限于此。例如,“动作信息”可以包含头部130的抬起时间、非移动时间、速度变化、地板面的材质、电动送风机114的风量、瞬间消耗电力以及向障碍物的碰撞等信息。
尘埃检测部170是对从头部130吸引的尘埃的量进行检测的传感器。尘埃检测部170是具备发光元件和受光元件的光学式传感器,并设于尘埃在吸尘器100内所经过的位置。从发光元件照射的光被受光元件接受,但是若尘埃经过,则光被遮挡。尘埃检测部170基于从受光元件输出的信号来对尘埃的量进行检测,并将表示检测到尘埃的量的尘埃量信息输出至控制电路150。尘埃检测部170以固定的时间间隔进行尘埃量信息的检测以及输出。
操作部112a具备用于将电源通入至吸尘器100的电源按钮、用于对吸尘器100的动作模式进行设定的模式设定按钮。操作部112a将确定已被用户按压的按钮的信号输出至控制电路150。
报告部112b具有以蓝色或者红色发光的LED(Light Emitting Diode:发光二极管),对关于吸尘器100的动作的信息进行报告。例如,报告部112b在吸尘器100被高效地使用的情况下使蓝色的LED发光,在吸尘器100未被高效地使用的情况下使红色的LED发光。关于吸尘器100是否被高效地使用的评价的详细内容将在后面加以记述。另外,报告部112b并不限于LED。例如,报告部112b可以是将信息显示于画面的显示装置,也可以是通过声音来对信息进行报告的扬声器。
风扇电机116是对电动送风机114的叶轮进行旋转驱动的电机。风扇电机116例如是直流电机,但并不限于此,可以使用各种电机。电动送风机114通过由风扇电机116的旋转所产生的负压来从吸引口130a吸入空气。
第一刷用电机135是对第一旋转刷133进行旋转驱动的电机。第二刷用电机136是对第二旋转刷134进行旋转驱动的电机。第一刷用电机135以及第二刷用电机136例如是直流电机,但并不限于此,可以使用各种电机。第一旋转刷133以及第二旋转刷134进行旋转,由此能够将尘埃从被清扫面F扫起。
控制电路150具备评价部151、电动送风机控制部152、旋转刷控制部153、评价基准调整部154、通信部155、存储部156。另外,这些功能部中,评价部151、电动送风机控制部152、旋转刷控制部153以及评价基准调整部154是通过设于控制电路150的硬件处理器执行计算机程序来实现的。
存储部156例如是快闪存储器(flash memory)等非挥发性存储器。存储部156将表示由动作检测部140检测到的头部130的动作的动作信息与表示由尘埃检测部170检测到的尘埃的量的尘埃量信息建立对应并进行存储。此外,存储部156还存储被评价部151使用的评价基准、使用操作部112a来设定的吸尘器100的动作模式的设定信息。
评价部151基于规定的评价基准对由动作检测部140检测到的吸尘器100的动作进行评价。具体而言,评价部151从存储部156读出评价基准,并基于从动作检测部140输出的动作信息(头部130的速度、加速度、移动方向以及一个动作的移动距离等)以及评价基准,对头部130的动作进行评价。
例如,评价基准是动作信息中所包含的数据的适当范围。具体而言,在评价基准是表示头部130的适当速度范围的值的情况下,评价部151输出评价值,该评价值是表示由动作检测部140检测到的头部130的速度是否包含于适当速度范围的值。
报告部112b基于从评价部151输出的评价值,使LED点亮为蓝色或者红色。例如,在头部130的速度包含于适当速度范围的情况下,报告部112b使LED点亮为蓝色。此外,在头部130的速度不包含于适当速度范围的情况下,报告部112b使LED点亮为红色。
另外,在报告部112b设有显示装置的情况下,也可以将根据评价值导出的评价关联信息显示于显示装置。例如,在头部130的速度超过适当速度范围的情况下,可以将“再慢一点移动吧”这样的消息作为评价关联信息显示于显示装置。此外,在报告部112b设有扬声器的情况下,也可以通过声音来输出消息。
操作部112a用于对是否进行基于对头部130的动作的评价值的控制进行设定。具体而言,操作部112a根据来自用户的按钮操作,受理“评价控制模式”的设定。“评价控制模式”是基于由评价部151计算出的评价值来对电动送风机114、第一旋转刷133以及第二旋转刷134进行控制的模式。在设定为“评价控制模式”的情况下,评价部151将使用评价基准计算出的评价值输出至电动送风机控制部152以及旋转刷控制部153。
在设定为“评价控制模式”的情况下,电动送风机控制部152基于由评价部151计算出的评价值,对电动送风机114进行控制。此外,旋转刷控制部153基于由评价部151计算出的评价值,对第一刷用电机135以及第二刷用电机136进行控制。
例如,在由评价值表示为头部130的速度超过适当速度范围的情况下,电动送风机控制部152以使电动送风机114的叶轮迅速地旋转的方式,对风扇电机116进行控制。另一方面,在由评价值表示为头部130的速度小于适当速度范围的情况下,电动送风机控制部152以使电动送风机114的叶轮缓慢地旋转的方式,对风扇电机116进行控制。另外,在由评价值表示为头部130的速度包含于适当速度范围的情况下,电动送风机控制部152以将电动送风机114的叶轮的旋转速度维持在通常的旋转速度的方式,对风扇电机116进行控制。
同样,例如,在由评价值表示为头部130的速度超过适当速度范围的情况下,旋转刷控制部153以使第一旋转刷133以及第二旋转刷134迅速地旋转的方式,对第一刷用电机135以及第二刷用电机136进行控制。另一方面,在由评价值表示为头部130的速度小于适当速度范围的情况下,旋转刷控制部153以使第一旋转刷133以及第二旋转刷134缓慢地旋转的方式,对第一刷用电机135以及第二刷用电机136进行控制。另外,在由评价值表示为头部130的速度包含于适当速度范围的情况下,旋转刷控制部153以将第一旋转刷133以及第二旋转刷134的旋转速度维持在通常的旋转速度的方式,对第一刷用电机135以及第二刷用电机136进行控制。
评价基准调整部154基于在存储部156中积累的尘埃量信息以及动作信息,对评价基准进行调整。关于评价基准调整部154的处理内容的详细情况将在后文加以记述。通信部155是用于经由网络与外部设备进行通信的通信设备。
另外,使被评价部151使用的“评价基准”为动作信息中包含的数据的适当范围,但并不限于此。例如,“评价基准”也可以是由神经网络构成的学习模型。以下,对作为评价基准的学习模型加以说明。
[1-4.学习模型的构成]
图4是对被评价部使用的学习模型加以说明的图。学习模型180包含输入层181、中间层182以及输出层183。图4中,使学习模型180为包含一个中间层182,但也可以包含多个中间层182。
若评价部151将吸尘器100的动作信息(头部130的速度、加速度、移动方向以及一个动作的移动距离等)输入至输入层181,则从输出层183输出评价值。“评价值”是0以上且1以下的值,值越大,表示吸尘器100越被高效地使用。
图5是示意性地表示学习模型中使用的神经网络的一部分的图。x表示各层的单元(节点)的值。各单元的值是权重w与前一个层的单元的输出相乘并相加所得的值通过规定的函数进行计算而得到的。若通过式子对该内容进行表示,则如下所述。
[数学式1]
y
…(1)
在此,b是偏置项。作为函数f,使用ReLU、Sigmoid函数等。从输入层181至输出层183反复进行上述式(1)的计算,由此求出通过学习模型180获得的评价结果。所谓“学习”的意思是将权重w以及偏置项b等调整为适当的值。通过随机梯度下降法等来进行学习。即,对各层的权重w以及偏置项b赋以随机的值,并将作为教师数据的数据组赋予输入层181。在学习的初始阶段,从输出层183输出的输出值为错误的值,但在教师数据的情况下,由于知晓本来希望被输出的值(目标值),因此,以使输出值与目标值的偏差(误差)变小的方式从输出层183朝向输入层181以反序对权重等进行更新。这被称为误差反向传播,输出值与目标值的误差通过平方误差或交叉熵等来表现。此时,若误差通过可微分的函数来表现,则能够通过计算求出为了减小误差而进行调整的量(梯度)。
评价部151使用学习模型对头部130的动作进行评价,并计算出表示评价结果的评价值。如上所述,“评价值”为0以上且1以下的值,值越大,表示吸尘器100越被高效地使用。评价部151将计算出的评价值输出至报告部112b。
报告部112b基于从评价部151输出的评价值,使LED点亮为蓝色或者红色。例如,在评价值为规定的阈值以上的情况下,报告部112b使LED点亮为蓝色。此外,在评价值为小于规定的阈值的情况下,报告部112b使LED点亮为红色。
另外,在报告部112b设有显示装置的情况下,可以将从评价值导出的评价关联信息显示于显示装置。例如,也可以基于评价值来计算出关于清扫的分数,将“今天的清扫为82分”的消息显示于显示装置。此外,在报告部112b设有扬声器的情况下,也可以通过声音来输出消息。
[1-5.评价控制模式中的处理]
图6为表示评价控制模式中的处理的流程图。本流程图在吸尘器100的电源通入后,以固定的时间间隔反复执行。首先,控制电路150判断是否使用操作部112a设定有评价控制模式(S10)。在判断为未设定控制模式的情况下(S10:否),控制电路150结束基于本流程图的处理。
另一方面,在判断为设定有控制模式的情况下(S10:是),控制电路150从存储部156获取动作信息以及评价基准(S11、S12)。控制电路150的评价部151基于从存储部156获取的动作信息以及评价基准,计算出关于头部130的动作的评价值(S13)。
报告部112b对由评价部151计算出的评价值或者从评价值导出的评价关联信息进行报告(S14)。电动送风机控制部152基于由评价部151计算出的评价值,对风扇电机116进行控制,从而对电动送风机控制部152的叶轮的旋转速度进行控制(S15)。旋转刷控制部153基于由评价部151计算出的评价值,对第一刷用电机135以及第二刷用电机136进行控制,从而对第一旋转刷133以及第二旋转刷134的旋转速度进行控制(S16)。至此,使基于本流程图的处理结束。
[1-6.评价基准的调整处理]
接下来,对评价基准的调整处理加以说明。根据使用吸尘器100的用户,作为清扫对象的用户房间的地面的状态(地板、长毛地毯等)有所不同。如果清扫对象的地面的状态不同,则头部130的最合适的动作也不同。因此,为了能够根据清扫对象的地面的状态来进行头部130的动作的适当评价,评价基准调整部154进行评价基准的调整处理。
另外,在此,对评价基准为图4所示的学习模型180的情况下的评价基准的调整处理加以说明。评价基准调整部154基于清扫时所检测的动作信息以及尘埃量信息,使搭载于吸尘器100的学习完毕的学习模型180进行追加学习。
图7为表示评价基准的调整处理的流程图。本流程图在用户对吸尘器100进行操作时,以固定的时间间隔反复执行。首先,制御电路150的评价基准调整部154获取由动作检测部140检测到的动作信息(头部130的速度、加速度、移动方向以及一个动作的移动距离等)(S20)。接着,评价基准调整部154获取由尘埃检测部170检测到的尘埃量信息(表示从头部130吸引到的尘埃的量的信息)(S21)。
评价基准调整部154基于获取到的尘埃量信息来计算出评价值(S22)。例如,评价基准调整部154以评价值的范围为0以上1以下的方式,并且以尘埃量越多评价值越大的方式,通过预先确定的手法来计算出评价值。
接下来,评价基准调整部154使用教师数据对评价基准进行调整(S23),教师数据是将在步骤S20中获取到的动作信息与在步骤S22中计算出的评价值建立了对应的数据。具体地讲,评价基准调整部154使用该教师数据,通过误差反向传播将前述的式(1)中的权重w以及偏置项b等调整为适当的值。评价基准调整部154将调整后的权重w以及偏置项b等参数作为评价基准存储于存储部156。至此,使基于本流程图的处理结束。
这样,评价基准调整部154通过进行学习模型180的追加学习来进行评价基准的调整处理。由此,评价部151能够进行头部130的动作的适当的评价。
如以上说明地那样,第一实施方式的吸尘器100具有对由用户操作的吸尘器100的动作进行检测的动作检测部140。通过利用动作检测部140的检测结果,第一实施方式的吸尘器100能够高精度地判断用户是否正在高效地使用吸尘器100。
(第二实施方式)
[2-1.家电系统的整体构成]
在第一实施方式中,对吸尘器单体的实施方式进行了说明。与此相对,在第二实施方式中,使外部装置具备吸尘器的功能的一部分,以下,对第二实施方式的详细内容加以说明。
图8为表示家电系统的构成的一个例子的图。家电系统10具备:吸尘器100、信息处理装置200、终端装置300、智能扬声器400。吸尘器100能够例如经由设置于房屋内的路由器R来与终端装置300以及智能扬声器400进行通信。吸尘器100经由路由器R与网络NW连接,能够与信息处理装置200进行通信。网络NW例如包含互联网、蜂窝网、Wi-Fi网、WAN(WideArea Network:广域网)、LAN(Local Area Network:局域网)、公共线路、电话线路、无线基站等中的一个以上。
在第二实施方式中,将与上述的图3所示的报告部112b相同的功能设于终端装置300,将上述的图3所示的评价部151以及评价基准调整部154同样的功能设于信息处理装置200。另外,设于第二实施方式的吸尘器100的通信部155(参照图3)将动作检测部140的检测结果、评价值或者评价关联信息中的至少一个发送至外部设备(信息处理装置200、终端装置300或者智能扬声器400)。
[2-2.信息处理装置的功能构成]
图9为表示信息处理装置的功能构成的框图。信息处理装置200是计算机,其具备存储计算机程序的存储器、执行计算机程序的CPU等硬件处理器。信息处理装置200具备评价部210、通信部211、评价基准调整部212、评价基准生成部213、存储部214。
评价部210以及评价基准调整部212是通过硬件处理器执行计算机程序来实现的功能部。通信部211是用于经由网络NW与外部设备进行通信的通信设备。存储部214例如通过RAM(Random Access Memory:随机存取存储器)、ROM(Read Only Memory:只读存储器)、HDD(Hard Disk Drive:硬盘驱动器)、快闪存储器或者这些设备中的多个组合而成的混合型存储装置等来实现。
通信部211从吸尘器100接收动作信息以及尘埃量信息并将动作信息以及尘埃量信息存储于存储部214。评价部210使用动作信息以及评价基准来计算出评价值。评价值的计算方法与第一实施方式相同,因此,省略说明。通信部211将由评价部210计算出的评价值经由网络NW发送至吸尘器100。吸尘器100若从信息处理装置200接收评价值,则将接收到的评价值经由路由器R发送至终端装置300或者智能扬声器400。
另外,在存储部214中,通过多次的清扫而积累有从吸尘器100接收到的动作信息和尘埃量信息。评价基准生成部213基于在存储部214中积累的这些信息,生成作为对头部130的动作进行评价时的基准的评价基准。对评价基准的生成处理的详细内容将在后文加以记述。
[2-3.终端装置的功能构成]
图10为表示终端装置的功能构成的框图。终端装置300是智能电话或平板电脑等便携终端装置,其具备存储计算机程序的存储器、执行计算机程序的CPU等硬件处理器。终端装置300具备通信部310和报告部311。
通信部310是用于经由网络NW与外部设备进行通信的通信设备。通信部310从吸尘器100接收评价值。报告部311例如具有将信息显示于画面的触摸屏。报告部311将由通信部310接收到的评价值或者从评价值导出的评价关联信息显示于触摸屏,由此将评价结果报告给用户。
另外,智能扬声器400也是与图10相同的框图。不过,智能扬声器400的报告部具有扬声器,通过声音来输出由通信部310接收到的评价值或者从评价值导出的评价关联信息。
[2-4.终端装置的显示内容]
图11为表示终端装置的显示画面的图。报告部311也可以基于由通信部310接收到的评价值来计算出关于清扫的分数,将“今天的清扫为82分”的消息320作为评价关联信息显示于触摸屏。此外,报告部311也可以基于由通信部310接收到的评价值,将“再慢一点移动吧”这样的表示关于清扫的建议的消息作为评价关联信息显示于触摸屏。
此外,在触摸屏显示有这些评价关联信息并且显示有清扫地图按钮330。若用户点击清扫地图按钮330,则报告部311将清扫地图的画面显示于触摸屏。
图12为表示清扫地图的画面的图。如图12所示,终端装置300将已进行了清扫的区域340显示于触摸屏。终端装置300可以从吸尘器100接收由动作检测部140检测到的动作信息的历史记录,并基于接收到的动作信息的历史记录判断已进行了清扫的区域340。
[2-5.评价基准的生成处理]
接下来,对评价基准的生成处理加以说明。另外,在此,对评价基准为图4所示的学习模型180的情况下的评价基准的生成处理加以说明。为了能够进行头部130的动作的适当的评价,信息处理装置200的评价基准生成部213预先使评价基准(学习模型180)进行学习。
图13为表示评价基准的生成处理的流程图。首先,通信部211从吸尘器100接收动作信息和尘埃量信息(S30)。接着,评价基准生成部213基于由通信部211接收到的尘埃量信息来计算出评价值(S31)。例如,评价基准生成部213以评价值的范围成为0以上1以下,并且尘埃量越多则评价值成为越大的值的方式,通过预先确定的手法来计算出评价值。
接下来,评价基准生成部213将教师数据存储于存储部214(S32),教师数据是对在步骤S30中接收到的动作信息和在步骤S31中计算出的评价值建立了对应的数据。评价基准生成部213判断存储部214是否已积累规定量以上的教师数据(S33)。
在判断为存储部214未积累规定量以上的教师数据的情况下(S33:否),返回到上述的步骤S30的处理。另一方面,在判断为存储部214已积累规定量以上的教师数据的情况下(S33:是),评价基准生成部213从存储部214读出教师数据,并使用已读出的教师数据来生成评价基准(S34)。
具体地讲,评价基准生成部213使用该教师数据,通过上述的误差反向传播来计算上述的式(1)的权重w以及偏置项b等。评价基准生成部213将计算出的权重w以及偏置项b等参数作为评价基准存储于存储部156。至此,使基于本流程图的处理结束。
如以上说明地那样,第二实施方式的家电系统10具有动作检测部140,其对由用户操作的吸尘器100的动作进行检测。通过利用动作检测部140的检测结果,第二实施方式的吸尘器100能够高精度地判断用户是否正在高效地使用吸尘器100。
此外,在第二实施方式的家电系统10中,能够使评价部、评价基准生成部以及报告部这些功能部分散在外部装置。由此,能够减轻吸尘器100的处理负担。
另外,在以上的说明中,对作为家电设备的一个例子的“吸尘器”进行了说明,但不限于此。例如,家电设备也可以是用户为了熨开服装的褶皱而使用的“熨斗”。该情况下,在熨斗也可以设有对由用户操作的熨斗的动作进行检测的动作检测部。评价部基于规定的评价基准对由动作检测部检测到的熨斗的动作进行评价即可。
本发明除了在上述的实施方式中说明的构成,还可以设置输出功能,其能够预先存储表示家电设备的动作的信息、其评价值、评价关联信息、基于这些进行调整后的评价基准等的经时变化,从而用户能够确认该变化。这样一来,从而能够期待用户实际感受到家电设备的操作有所进步,并且变得更享受操控家电设备的效果。
此外,在基于本发明的家电设备、家电系统中,也可以设置识别操作家电设备的用户的功能,该功能例如识别家族中谁进行了使用等的功能,并按用户分别存储表示家电设备的动作的信息、其评价值、评价关联信息、基于这些进行调整后的评价基准等信息。这样一来,能够根据用户个人的习惯来对家电的操作进行评价或者对家电的动作控制进行调整。识别操作家电设备的用户的功能通过受理在各个时刻使用家电设备的用户的输入等公知的方法来实现即可。
此外在上述的实施方式中,对在家电设备设置动作检测部进行了说明,但并不限于此,还能够通过在用户随身携带的终端设备设置动作检测部,并从终端设备接收用户操作的信息的方式来实现基于本发明的家电设备、家电系统。该情况下,在终端设备设置输入定时的功能即可,该定时是发挥动作检测部的功能或者使动作检测部的功能结束的定时。这样一来,能够对正在进行家电设备的操作的时间和除此以外的时间进行区别地获取来自动作检测部的信息。例如作为上述的终端设备,可以列举出利用用户随身携带的智能手表、装在用户所穿着的衣服的口袋里的智能电话。
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子公开的,意图并不在于将发明的范围限定于上述的实施方式。这些实施方式能够通过其他的各种方式来实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围和主旨中,同样也包含于权利要求书中记载的发明及其等同的范围内。
- 家电设备、家电系统,评价方法以及评价基准生成方法
- 家电设备配置文件生成方法、装置、家电设备和存储介质