一种雷达装置及无人机
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及雷达技术领域,尤其涉及一种雷达装置及无人机。
背景技术
随着智能飞行时代的到来,无人机对于安全性的要求越来越高,无人机需要更多的传感器才能保证飞行的安全。现有技术的无人机主要采用摄像头获取四周图像,通过操控台肉眼识别障碍物并人工判断该障碍物的方位、与无人机之间的距离等,在飞行过程中很容易出现撞机事故。雷达作为无人机中重要的感知元件,可以测量无人机与被测物体(即障碍物)之间的距离、角度、速度等。在无人机飞行过程可以通过雷达躲避空中电线、树枝等障碍物,实现安全飞行。
现市面上的无人机中,通常大型无人机才会安装有雷达,而小型无人机未安装有雷达;且大型无人机上的雷达其体积较大、结构不够紧凑,不适于小型无人机使用。
故,现亟需一款能解决上述问题的产品。
发明内容
本发明的目的在于解决雷达体积较大、结构不够紧凑的技术问题。
为了解决上述技术问题,本发明提供一种雷达装置,采用了如下所述的技术方案:
该雷达装置包括具有容腔的壳体,所述容腔内设有用于发射、接收及处理信号的天线模组和与所述天线模组电连接且用于与外接设备电连接的转接模组,所述转接模组设于所述壳体的内壁,所述转接模组和天线模组通过固定支架相连接;所述天线模组包括主芯片和集成于所述主芯片内的天线本体,所述转接模组和固定支架为沿所述壳体的长度方向相互平行设置。
可选地,所述转接模组包括第一转接部,所述壳体对应所述第一转接部的位置处开设有第一通孔,所述转接模组位于所述壳体的长度方向上的一端,且与所述固定支架和所述天线模组均为交叉设置。
可选地,所述转接模组还包括设于所述壳体的内壁上的第一线路板,所述第一转接部设于所述第一线路板上朝向所述壳体的一面,所述固定支架设于所述第一线路板的另一面。
可选地,所述天线模组还包括叠设于所述固定支架上的第二线路板,所述主芯片叠设于所述第二线路板上背向所述固定支架的一面。
可选地,所述雷达装置还包括与所述天线模组和转接模组电连接的稳压模组,所述稳压模组与天线模组、固定支架互为平行层叠设置。
可选地,所述固定支架位于所述稳压模组和天线模组之间,所述稳压模组包括第三线路板、稳压器和滤波器,所述天线模组的第二线路板叠设于所述固定支架的一面,所述第三线路板叠设于所述固定支架的另一面,所述稳压器和滤波器均设于所述第三线路板上朝向所述固定支架的一面。
可选地,所述雷达装置还包括第一电连组件,所述第一电连组件包括接口端和与所述接口端相连接的排线,所述接口端设于所述转接模组中的所述第一线路板上设有所述固定支架的一面,所述排线连接于所述天线模组中的所述第二线路板或所述稳压模组中的所述第三线路板。
可选地,所述雷达装置还包括位于所述第二线路板和第三线路板之间的第二电连组件,所述第二电连组件包括连接头和与所述连接头插接配合的连接座,所述连接头设于所述第二线路板上,所述连接座设于所述第三线路板上,或者,所述连接头设于所述第三线路板上,所述连接座设于所述第二线路板上;所述固定支架上开设有用于供所述第二电连组件穿过的第二通孔和用于供所述稳压器和滤波器穿过的第三通孔。
可选地,所述壳体包括上部和沿所述上部的长度方向与所述上部首尾连通的下部,所述天线模组和固定支架位于所述上部,所述转接模组位于所述下部,且所述上部的厚度小于所述下部的厚度。
为了解决上述技术问题,本发明还提供一种无人机,包括机身和设于所述机身上的第二转接部,还包括上述所述的雷达装置,所述雷达装置的壳体装设于所述机身上,且所述雷达装置的转接模组上的第一转接部与所述机身上的第二转接部电连接。
与现有技术相比,本发明提供的雷达装置及无人机主要有以下有益效果:
该雷达装置中壳体的容腔内设有天线模组,天线模组包括主芯片和集成于主芯片内的天线本体,将天线本体与主芯片设置为集成结构,节约了容腔内常规天线所要占据的空间,并且转接模组和固定支架为沿壳体的长度方向相互平行设置,有效减小雷达装置的体积、且使得容腔内的结构更为紧凑。
附图说明
为了更清楚地说明本发明中的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
图1是本发明一个实施例中雷达装置的立体结构示意图;
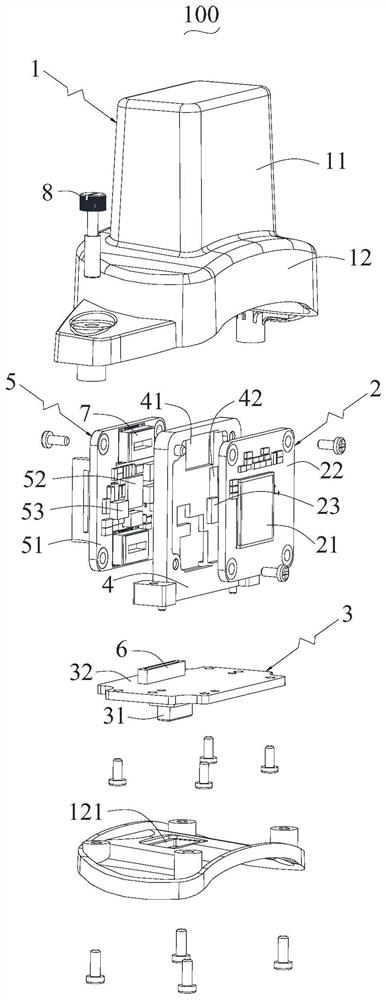
图2是图1中雷达装置的爆炸图;
图3是图1中固定支架的立体结构示意图;
图4是本发明一个实施例中雷达装置的结构框图。
附图中的标号如下:
100、雷达装置;
1、壳体;11、上部;12、下部;121、第一通孔;
2、天线模组;21、主芯片;22、第二线路板;23、导热垫;
3、转接模组;31、第一转接部;32、第一线路板;
4、固定支架;41、第二通孔;42、第三通孔;
5、稳压模组;51、第三线路板;52、稳压器;53、滤波器;
6、接口端;7、连接座;8、紧固件。
具体实施方式
除非另有定义,本文所使用的所有技术和科学术语与属于本发明技术领域的技术人员通常理解的含义相同;本文在说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明,例如,术语“长度”、“宽度”、“厚度”、“上”、“下”、“竖直”、“水平”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是便于描述,不能理解为对本技术方案的限制。
本发明的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含;本发明的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
本发明的说明书和权利要求书及上述附图说明中,当元件被称为“固定于”或“安装于”或“设置于”或“连接于”另一个元件上,它可以是直接或间接位于该另一个元件上。例如,当一个元件被称为“连接于”另一个元件上,它可以是直接或间接连接到该另一个元件上。
此外,在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
需要说明的是,为方便理解,以下实施例中将外接设备设定为无人机进行叙述,更具体的是小型无人机。但并不意味着本发明实施例提供的雷达装置100仅限于应用在小型无人机上,也可以应用在中大型无人机、车辆、移动机器人等其他移动设备上。
本发明实施例提供一种雷达装置100,如图1和图2所示,该雷达装置100包括具有容腔(图中未示出)的壳体1,容腔内可设有天线模组2和转接模组3,转接模组3可电连接于天线模组2,即转接模组3和天线模组2可相互传递数据。其中,天线模组2可用于发射、接收及处理信号。具体地,天线模组2向外发射探测信号,当该探测信号碰到障碍物时会遭到反弹形成反射信号,天线模组2在接收到该反射信号后进行处理,以获取无人机与障碍物之间的实时距离、角度以及障碍物的实时移动速度等条件数据,该条件数据可根据预设好的算法精确运算、规划出无人机的飞行路线、飞行速度等目标数据;转接模组3可用于与无人机电连接,即通过转接模组3可实现雷达装置100与无人机之间的电连接,也即转接模组3可与无人机之间相互传递数据。具体地,天线模组2处理好的目标数据经由转接模组3传递至无人机,无人机即可根据该目标数据实时调整飞行路线、飞行速度等,以能精准地避开障碍物,满足无人机飞行方向前方探测范围要求,提高无人机飞行的安全性,有效减少撞机的发生概率、人物伤害和财产损失等。转接模组3可设于壳体1的内壁,转接模组3和天线模组2可通过固定支架4相连接。
天线模组2包括主芯片21和天线本体(图中未示出),主芯片21可控制天线本体发射探测信号和接收反射信号,以及对天线本体接收到的反射信号进行处理、运算。天线本体可集成于主芯片21内,即将主芯片21和天线本体设置为集成结构,节约了容腔内常规天线所要占据的空间,有效减小雷达装置100的体积,且使得容腔内的结构更为紧凑。并且,转接模组3和固定支架4可以为沿壳体1的长度方向相互平行设置,以使天线模组2、转接模组3和固定支架4装配后结构紧凑、总体尺寸得到有效控制。
可以理解地,如图4所示,该雷达装置100的工作原理大致如下:
当装设有雷达装置100的无人机在飞行时,该雷达装置100中的天线模组2向外发射出探测信号,以探测无人机前方的飞行方向上是否有障碍物;当探测信号遇到障碍物时被障碍物反弹以形成反射信号,天线模组2在接收到该反射信号后进行处理,以获取无人机与障碍物之间的实时距离、角度以及障碍物的实时移动速度等条件数据,该条件数据根据预设好的算法精确运算出无人机与障碍物之间的实时距离、角度以及障碍物的实时移动速度等目标数据;该目标数据经由转接模组3传输至无人机,无人机则根据该目标数据实时调整飞行路线、飞行速度等,以精准地避开障碍物。
综上,相比现有技术,该雷达装置100至少具有以下有益效果:
该雷达装置100中壳体1的容腔内设有天线模组2,天线模组2包括主芯片21和集成于主芯片21内的天线本体,将天线本体与主芯片21设置为集成结构,节约了容腔内常规天线所要占据的空间,并且转接模组3和固定支架4为沿壳体1的长度方向相互平行设置,有效减小雷达装置100的体积,且使得容腔内的结构更为紧凑,可适用于小型的无人机。
在一些实施例中,该雷达装置100可以为毫米波雷达,通常毫米波是指30~300GHz频域(波长为1~10mm)的波。毫米波的波长介于微波和厘米波之间,因此毫米波雷达兼有微波雷达和光电雷达的一些优点。毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标;具有成像能力,体积小、机动性和隐蔽性好,是无人机中重要的感知元件。
在一些实施例中,当该雷达装置100为毫米波雷达时,壳体1可采用可穿透毫米波的材料制成,如聚对苯二甲酸丁二醇酯(PBT),以在壳体1能保护容腔内各元器件的同时,还能减少对天线本体性能的影响。
在一些实施例中,如图2所示,转接模组3包括第一转接部31,壳体1对应第一转接部31的位置处可开设有第一通孔121,则第一转接部31的转接端可朝向第一通孔121或者穿过第一通孔121,以使转接模组3的第一转接部31能与无人机的对应部件电连接。转接模组3可位于壳体的长度方向上的一端,且该转接模组3可与固定支架4和天线模组2均为交叉设置。
在一些实施例中,固定支架4可采用金属材料制成,可用于对天线模组2进行散热,以增加雷达装置100的散热性能。
在一些实施例中,如图2所示,转接模组3还包括第一线路板32,第一线路板32可设于壳体1的内壁上,第一转接部31可设于第一线路板32上朝向壳体1的一面,以使第一转接部31能恰好位于第一通孔121处或穿过壳体1上的第一通孔121;固定支架4可设于第一线路板32的另一面。
在一些实施例中,如图2所示,天线模组2还包括第二线路板22,第二线路板22可叠设于固定支架4上,主芯片21可叠设于第二线路板22上背向固定支架4的一面,即第二线路板22、主芯片21以及固定支架4均平行设置,以在壳体1的厚度方向上紧密贴合。
在一些实施例中,如图2所示,天线模组2还包括导热垫23,该导热垫23可设于第二线路板22和固定支架4之间,可用于将天线模组2运行时产生的热量传导至固定支架4上,加快雷达装置100的散热速度。
在一些实施例中,如图2所示,由于雷达装置100本身不设有电源,雷达装置100运行所需的电源实质是由无人机提供,所以无人机在给雷达装置100提供电源时有对该电源电压进行处理的需要。基于此,雷达装置100还包括与天线模组2和转接模组3电连接的稳压模组5,稳压模组5与天线模组2、固定支架4可互为平行层叠设置,以使天线模组2、转接模组3、稳压模组5和固定支架4装配后结构紧凑、总体尺寸得到有效控制。
在一些实施例中,如图2所示,固定支架4可位于稳压模组5和天线模组2之间。稳压模组5包括第三线路板51、稳压器52和滤波器53等元器件,该稳压模组5可用于对无人机提供的电源进行稳压处理,以能更适于该雷达装置100使用。天线模组2中的第二线路板22叠设于固定支架4上的一面,第三线路板51可叠设于固定支架4的另一面,即第二线路板22、第三线路板51、主芯片21以及固定支架4均平行设置,以在壳体1的厚度方向上紧密贴合;稳压器52和滤波器53均可设于第三线路板51上朝向固定支架4的一面。
在一些实施例中,如图2所示,雷达装置100还包括第一电连组件,第一电连组件包括接口端6和与接口端6相连接的排线(图中未示出),接口端6可设于转接模组3中的第一线路板32上设有固定支架4的一面,排线可连接于天线模组2中的第二线路板22或稳压模组5中的第三线路板51。可以理解地,当雷达装置100仅设有天线模组2和转接模组3时,排线可连接于第二线路板22,即天线模组2直接与转接模组3电连接;当雷达装置100设有天线模组2、转接模组3和稳压模组5时,排线可连接于第三线路板51,即天线模组2与转接模组3通过稳压模组5电连接。
在一些实施例中,如图2和图3所示,当雷达装置100设有转接模组3时,雷达装置100还包括第二电连组件,第二电连组件可位于第二线路板22和第三线路板51之间,及位于天线模组2与稳压模组5之间。第二电连组件包括连接头(图中未示出)和与连接头插接配合的连接座7,连接头可设于第二线路板22上,对应地,连接座7可设于第三线路板51上;或者,连接头可设于第三线路板51上,对应地,连接座7可设于第二线路板22上。即天线模组2和稳压模组5通过板对板方式实现电连接。
固定支架4上可开设有至少一第二通孔41和至少一第三通孔42,第二通孔41可用于供第二电连组件穿过,以使第二电连组件的连接头和连接座7能插接在一起,第三通孔42可用于供第三线路板51上的稳压器52、滤波器53等其他元器件和/或第二线路板22上的元器件穿过,以使在天线模组2和稳压模组5装配在固定支架4上时,不会增加天线模组2、稳压模组5以及固定支架4以外的厚度。
在一些实施例中,如图1和图2所示,壳体1包括上部11和下部12,下部12可沿上部11的长度方向与上部11首尾连通,天线模组2和固定支架4可位于上部11,当然,若雷达装置100设有稳压模组5也可位于上部11,转接模组3可位于下部12,且上部11的厚度可小于下部12的厚度。
可以理解地,设定上部11为壳体1的上部分,下部12为壳体1的下部分。基于此,固定支架4及叠设于固定支架4上的天线模组2、稳压模组5均竖直放置于上部11,上部11的宽度(即壳体1上部分的厚度)可对应天线模组2、稳压模组5及固定支架4叠设在一起的总厚度设置;转接模组3平躺放置于下部12,下部12的宽度(即壳体1下部分的厚度)可对应转接模组3中第一线路板32的宽度设置。以能够有效地减小雷达装置100的体积及减轻雷达装置100的重量。
在一些实施例中,如图1和图2所示,雷达装置100可通过螺钉、螺栓等紧固件8可拆卸地装配于无人机上。具体地,雷达装置100在与无人机电连接后,采用紧固件8将雷达装置100的壳体1锁紧在无人机上。
或者,雷达装置100可通过卡扣和卡槽可拆卸地装配于无人机上。卡扣可设于雷达装置100的壳体1上开设有第一通孔121的一面,对应地,卡槽可设于在雷达装置100与无人机电连接后卡扣所对应的无人机的位置处,当然,卡扣和卡槽所设置的位置是可以对调的。具体地,雷达装置100在与无人机电连接的同时,卡扣与卡槽卡接配合,即该雷达装置100通过卡接配合卡固在无人机上。当然,雷达装置100可拆卸地装配于无人机的实现方式包括但不限于以上两种,只要能使雷达装置100方便安装于无人机上,也方便从无人机上拆卸下来的方式均在本发明的保护范围内。
本发明实施例还提供一种无人机(图中未示出),包括机身、设于机身上的第二转接部以及上述的雷达装置100。雷达装置100的壳体1可通过螺接配合或卡接配合等方式装设于机身上,并且,雷达装置100的转接模组3上的第一转接部31可与机身上的第二转接部电连接。
在一些实施例中,如图1和图2所示,雷达装置100的第一转接部31可以为转接头,对应地,无人机的第二转接部可以为转接口;或者,雷达装置100的第一转接部31可以为转接口,对应地,无人机的第二转接部可以为转接头。转接头和转接口插接配合以使雷达装置100与无人机电连接。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
- 雷达装置、雷达的无线旋转装置及无人机
- 基于毫米波雷达的固定翼无人机防撞系统雷达信号处理装置