通用型模块化线控转向操控机构
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及环卫装备技术领域,尤其涉及通用型模块化线控转向操控机构。
背景技术
目前,现有的环卫自跟随清吸机转向操控机构,一般采用转向电机连接扭转减震器再串联固定在前桥转向轴上,再由转向轴直接驱动前轮转向;或者通过转向电机驱动链条或同步带,在串联连接扭转减震器,通过转向轴直接驱动前轮转向。以上转向机构采用扭转减震器、链条或同步带连接,目的是用来消除转向轴的装配同轴度误差,及吸收转向轮回馈回来的反向转向冲击力。但是整体转向操控机构复杂及轴向装配长度偏长,影响整机的高度、体积及重量,从而造成需要装配零部件多,精度要求高,增加了整机的成本,而且不便于售后维修。
发明内容
本发明的目的在于提供通用型模块化线控转向操控机构,以解决现有的环卫自跟随清吸机转向操控机构体积较大、零部件多、结构复杂、装配精度要求高、造价成本高、维护不方便、替换性不高等技术问题。
本发明采用的技术方案是:
通用型模块化线控转向操控机构,司机座椅1安装固定于车架3的上端面,电动转向管柱模块总成2通过减震软垫4安装在车架3上并位于司机座椅1的下方,电动转向管柱模块总成2通过花键轴与设在车架底部的双轮轴转向前桥5连接,转向柱支撑固定座7位于司机座椅1的前方并与车架3固定连接,切换开关8及线控方向盘模块总成9通过紧固件连接固定在转向柱支撑固定座7上端面;减震软垫4用来吸收转向过程的冲击力; 双轮轴转向前桥5支撑整机重量并实现整机转向及行走;线控方向盘模块总成9用于将驾驶员的转向动作由机械转向转换为信号输出至电动转向管柱模块总成2,电动转向管柱模块总成2提供控制及驱动双轮轴转向前桥5转向运动。
进一步地,作为一种较优实施方式,电动转向管柱模块总成2包括电动转向管柱固定支架21以及通过紧固件连接固定在电动转向管柱固定支架21上的驱动电机控制单元ECU22和转向驱动电机23,固定在电动转向管柱固定支架21与车架3固定连接。
线控方向盘模块总成9用于将驾驶员的转向动作由机械转向转换为信号输出至驱动电机控制单元ECU,驱动电机控制单元ECU控制双轮轴转向前桥5。
减震软垫转向轮回馈回来的反向转向冲击力,及转向驱动电机启动时的冲击力。
进一步地,作为一种较优实施方式,转向柱支撑固定座7对应行进方向的前端设置自动跟随模块总成6,自动跟随模块总成6包括传感器和控制系统,通过传感器探测车辆的跟随状态并根据设定的跟踪方式自动跟随,控制系统用于输出信号至电动转向管柱模块总成2的驱动电机控制单元ECU实现自动控制转向驱动电机工作,以实现自动跟随作业,从而实现整机升级为无人驾驶带自动跟随功能。
进一步地,作为一种较优实施方式,切换开关8通过紧固件连接固定在转向柱支撑固定座7上端面,切换开关8连接驱动电动转向管柱模块总成2的电机控制单元ECU,通过切换开关8切换无人驾驶和有人驾驶模式。
进一步地,作为一种较优实施方式,双轮轴转向前桥5包括轮胎51、轮毂52和前轮转轴桥53,前轮转轴桥53的上端与车架3固定连接,前轮转轴桥53的两侧分别安装一轮毂52,轮毂52上套设轮胎51,轮毂52通过轮胎螺母与前轮转轴桥53连接组成双轮轴转向前桥5。
进一步地,作为一种较优实施方式,车架3包括固定连接板31,电动转向管柱模块总成2、减震软垫4及双轮轴转向前桥5通过紧固件连接固定在固定连接板31上,电动转向管柱固定支架21和固定连接板31上与减震软垫连接的固定孔开设两个交叉方向上的长条孔,用来调节相关转向零件制作和装配误差。
因为电动转向管柱模块总成2与双轮轴转向前桥5,通过花键轴连接需要的同轴度精度较高。
本发明采用以上技术方案,将扭转减震器的功能用减震软垫代替,安装在四周,不需要安装在转向轴上,降低了转向轴轴向高度,通过在减震软垫固定支架上开设的两个交叉方向上的长条孔,用来调节相关转向零件制作和装配误差,降低制造及装配相关零部件的精度要求,使装配更加容易,同时减震软垫充当固定电动转向管柱模块总成零件,其整体结构简单,造价成本低;将转向驱动电机控制单元ECU 及驱动电机,固定在支架上,组成电动转向管柱模块总成,方便动转向管柱模块调试、维修及更换,减少体积,通过线控方向盘模块及自动跟随模块,实现由有人驾驶及无人驾驶模式相互切换,实现整机的无人驾驶自动跟随作业的功能升级,增加产品多样性及附加价值。本发明减少转向装配连接零件,减短转向机构轴向长度,降低装配精度要求;另外通过对转向操控机构的模块化,实现对整机转向操控机构的快速安装、维修、替换、升级等,从而实现降低整机制造成本,增加转向操控机构的通用化。
附图说明
以下结合附图和具体实施方式对本发明做进一步详细说明;
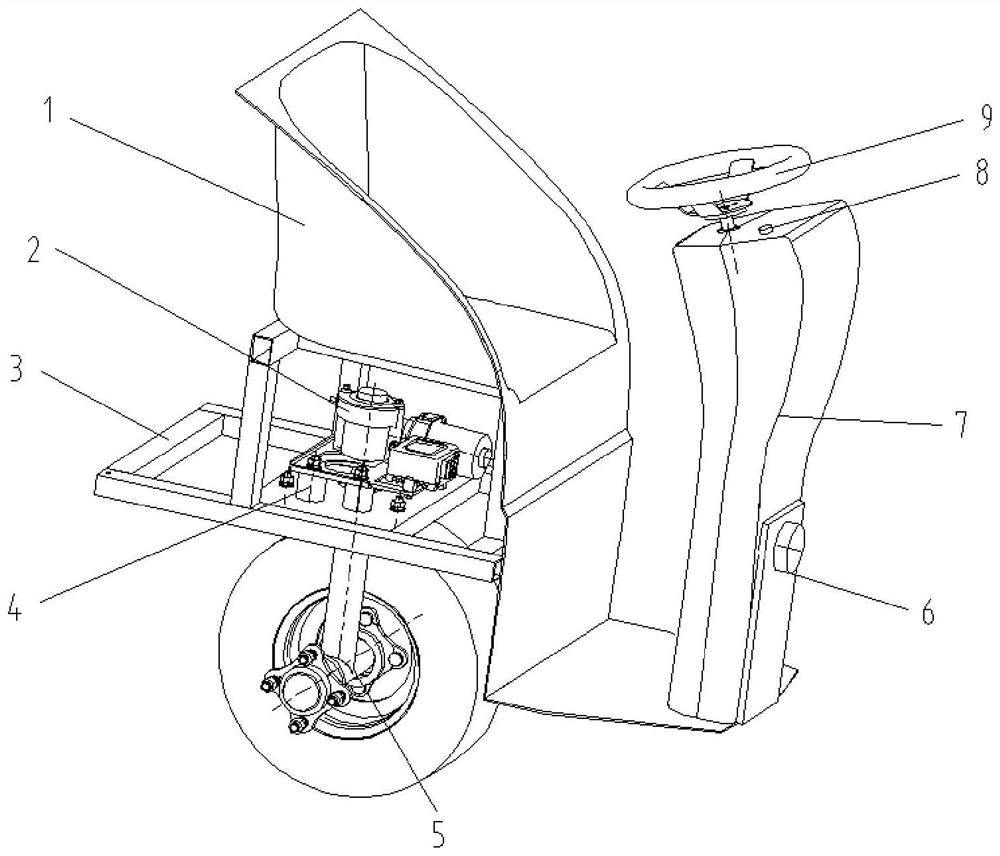
图1是本发明前桥与线控转向操纵机构组装后的结构示意图;
图2是转向柱零部件结构分解示意图;
图3是前桥线控转向结构的组装图;
图4是前桥线控转向结构的组成零部件分解示意图;
图5是电动转向管柱模块总成组成零部件分解示意图。
图中标注说明:1、司机座椅;2、电动转向管柱模块总成;3、车架;4、减震软垫;5、双轮轴转向前桥;6、自动跟随模块总成;7、转向柱支撑固定座;8、切换开关;9、线控方向盘模块总成;21、电动转向管柱固定支架;22、驱动电机控制单元ECU;23、转向驱动电机;31、固定连接板;51、轮胎;52、轮毂;53、前轮转轴桥。
具体实施方式
为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图对本申请实施例中的技术方案进行清楚、完整地描述。
如图1至图5之一所示,本发明公开了通用型模块化线控转向操控机构,司机座椅1安装固定于车架3的上端面,电动转向管柱模块总成2通过减震软垫4安装在车架3上并位于司机座椅1的下方,电动转向管柱模块总成2通过花键轴与设在车架底部的双轮轴转向前桥5连接,转向柱支撑固定座7位于司机座椅1的前方并与车架3固定连接,切换开关8及线控方向盘模块总成9通过紧固件连接固定在转向柱支撑固定座7上端面;减震软垫4用来吸收转向过程的冲击力; 双轮轴转向前桥5支撑整机重量并实现整机转向及行走;线控方向盘模块总成9用于将驾驶员的转向动作由机械转向转换为信号输出至电动转向管柱模块总成2,电动转向管柱模块总成2提供控制及驱动双轮轴转向前桥5转向运动。
此外,其他部件的功能作用如下:司机座椅:提供驾驶员操纵座位等功能;车架:提供支撑固定司机座椅、双轮轴转向前桥、减震软垫及转向柱支撑固定座;转向柱支撑固定座:主要是用来固定线控方向盘模块总成、切换开关及自动跟随模块总成。
进一步地,作为一种较优实施方式,电动转向管柱模块总成2包括电动转向管柱固定支架21以及通过紧固件连接固定在电动转向管柱固定支架21上的驱动电机控制单元ECU22和转向驱动电机23,固定在电动转向管柱固定支架21与车架3固定连接。
其中,21、电动转向管柱固定支架:用来集成及固定驱动电机控制单元ECU和转向驱动电机,与减震软垫连接的固定孔开设长条孔,用来调节相关转向零件制作和装配误差;22、驱动电机控制单元ECU:主要是根据输入信号控制转向驱动电机的启停及转动;23、转向驱动电机:主要由驱动电机,涡轮蜗杆组件组成,用于降低输出转速,提高输出扭力及转向精度,降低整个机构高度,并提供转向驱动动力。
线控方向盘模块总成9用于将驾驶员的转向动作由机械转向转换为信号输出至驱动电机控制单元ECU,驱动电机控制单元ECU控制双轮轴转向前桥5。
减震软垫转向轮回馈回来的反向转向冲击力,及转向驱动电机启动时的冲击力。
进一步地,作为一种较优实施方式,转向柱支撑固定座7对应行进方向的前端设置自动跟随模块总成6,自动跟随模块总成6包括传感器和控制系统,通过传感器探测车辆的跟随状态并根据设定的跟踪方式自动跟随,控制系统用于输出信号至电动转向管柱模块总成2的驱动电机控制单元ECU实现自动控制转向驱动电机工作,以实现自动跟随作业,从而实现整机升级为无人驾驶带自动跟随功能。
进一步地,作为一种较优实施方式,切换开关8通过紧固件连接固定在转向柱支撑固定座7上端面,切换开关8连接驱动电动转向管柱模块总成2的电机控制单元ECU,通过切换开关8切换无人驾驶和有人驾驶模式。
进一步地,作为一种较优实施方式,双轮轴转向前桥5包括轮胎51、轮毂52和前轮转轴桥53,前轮转轴桥53的上端与车架3固定连接,前轮转轴桥53的两侧分别安装一轮毂52,轮毂52上套设轮胎51,轮毂52通过轮胎螺母与前轮转轴桥53连接组成双轮轴转向前桥5。具体地,轮胎51:主要是支撑整车重量及行走等功能;轮毂52:主要是连接轮胎和前桥等功能;前轮转轴桥53:主要是支撑和传递整车重量、行走及转向等功能。
进一步地,作为一种较优实施方式,车架3包括固定连接板31,电动转向管柱模块总成2、减震软垫4及双轮轴转向前桥5通过紧固件连接固定在固定连接板31上。因为电动转向管柱模块总成2与双轮轴转向前桥5,通过花键轴连接需要的同轴度精度较高。电动转向管柱固定支架21和固定连接板31上与减震软垫连接的固定孔开设两个交叉方向上的长条孔,用来调节相关转向零件制作和装配误差。
本发明采用以上技术方案,将扭转减震器的功能用减震软垫代替,安装在四周,不需要安装在转向轴上,降低了转向轴轴向高度,通过在减震软垫固定支架上开设的两个交叉方向上的长条孔,用来调节相关转向零件制作和装配误差,降低制造及装配相关零部件的精度要求,使装配更加容易,同时减震软垫充当固定电动转向管柱模块总成零件,其整体结构简单,造价成本低;将转向驱动电机控制单元ECU 及驱动电机,固定在支架上,组成电动转向管柱模块总成,方便动转向管柱模块调试、维修及更换,减少体积,通过线控方向盘模块及自动跟随模块,实现由有人驾驶及无人驾驶模式相互切换,实现整机的无人驾驶自动跟随作业的功能升级,增加产品多样性及附加价值。本发明减少转向装配连接零件,减短转向机构轴向长度,降低装配精度要求;另外通过对转向操控机构的模块化,实现对整机转向操控机构的快速安装、维修、替换、升级等,从而实现降低整机制造成本,增加转向操控机构的通用化。
显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
- 通用型模块化线控转向操控机构
- 一种低速车辆线控转向助力操控手力模拟机构