扫地机器人的拖地清洁结构
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及用于室内清洁的扫地机器人的附件,具体地说是一种扫地机器人的拖地清洁结构。
背景技术
随着人们物质生活水平的不断提高,扫地机器人应运而生。扫地机器人能凭借一定的人工智能,自动在房间内完成地板清理工作。一般包括清扫、吸尘、拖地三个步骤。
现有扫地机器人的拖地工作一般采用拖地清洁结构来完成的。市场上有一种扫地机器人的拖地清洁结构采用的是双转盘对向转动的拖地清洁结构,这种结构的拖地清洁结构拖地效率不是太好,尤其是对顽渍,时有拖不干净的问题出现。
发明内容
为了解决上述问题,本发明向社会提供一种可有效除去顽渍的扫地机器人的拖地清洁结构。
本发明的技术方案是:提供一种扫地机器人的拖地清洁结构,所述拖地清洁结构悬挂于扫地机器人主体的底部,且设置为可相对于地面旋转来进行拖地清洁,包括驱动部、第一转盘、第二转盘和激振部件;
所述驱动部包括驱动马达,所述驱动马达驱动所述第一转盘和所述第二转盘旋转;
所述激振部件设置在所述驱动马达的输出轴上,当所述拖地清洁结构工作时,用于振动所述拖地清洁结构。
作为对本发明改进,所述驱动马达的两端分别设有第一输出轴和第二输出轴,所述第一输出轴和第二输出轴与所述第一转盘和所述第二转盘的轴心的连线平行,且所述第一输出轴通过第一传动机构驱动所述第一转盘旋转,所述第二输出轴通过第二传动机构驱动所述第二转盘旋转。
作为对本发明改进,所述激振部件至少包括第一激振部件,所述第一激振部件设在所述第一输出轴的延长段上,当所述第一输出轴旋转时,依靠所述第一激振部件的作用而使所述拖地清洁结构振动。
作为对本发明改进,所述激振部件还包括第二激振部件,所述第二激振部件设在所述第二输出轴的延长段上,当所述第二输出轴旋转时,依靠所述第二激振部件的作用而使所述拖地清洁结构振动。
作为对本发明改进,所述驱动马达的两端分别设有第一输出轴和第二输出轴,所述第一输出轴和第二输出轴与所述第一转盘和所述第二转盘的轴心的连线垂直,且所述第一输出轴通过第一传动机构和第二传动机构分别驱动所述第一转盘和所述第二转盘旋转,所述激振部件设在第二输出轴上。
作为对本发明改进,所述激振部件是偏心轮。
作为对本发明改进,所述第一传动机构包括第一蜗杆和第一减速齿轮组,所述第一蜗杆一端与所述第一输出轴连接,所述第一蜗杆另一端与所述第一减速齿轮组啮合。
作为对本发明改进,所述第二传动机构包括第二蜗杆和第二减速齿轮组,所述第二蜗杆的一端与所述第二输出轴连接,所述第二蜗杆的另一端与所述第二减速齿轮组啮合。
作为对本发明改进,在所述第一转盘的下底面上设有第一抹布;在所述第二转盘的下底面上设有第二抹布。
本发明由于采用了在所述驱动马达的输出轴上设置激振部件的结构,这样,当所述拖地清洁结构工作时,激振部件可以振动所述拖地清洁结构,从而达到清除顽渍的目的。
附图说明
图1是本发明的第一种实施例的平面结构示意图。
图2是图1中的A-A剖面结构示意图。
图3是本发明的第二种实施例的平面结构示意图。
图4是本发明与扫地机器人主体连接的分解结构示意图。
图5是图4组合后的平面结构示意图。
图6是图5中的B-B剖面结构示意图。
具体实施方式
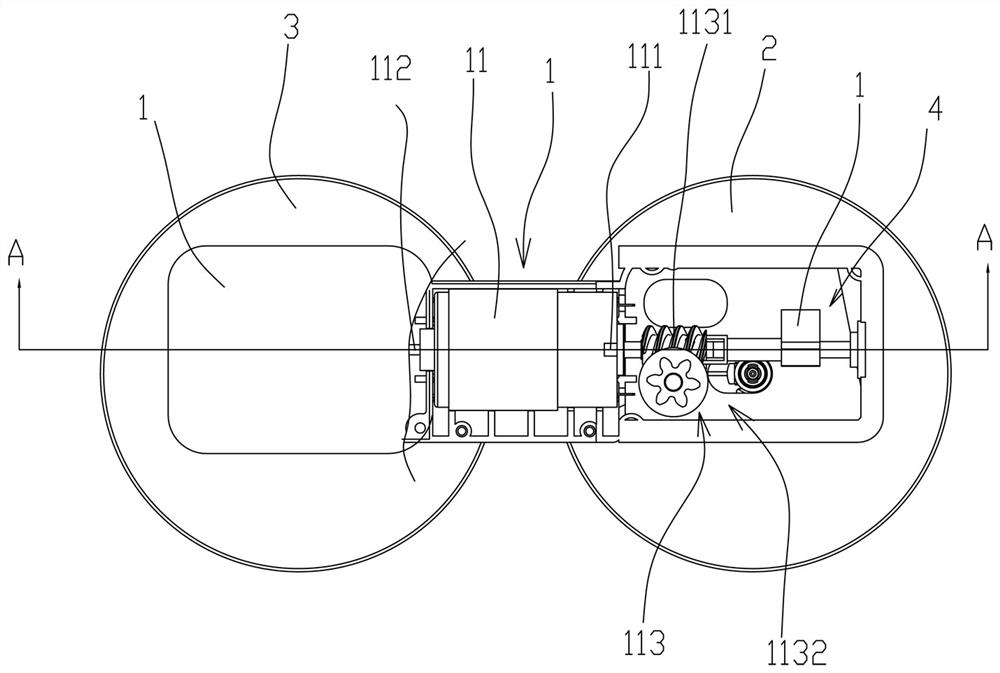
请参见图1和图2,图1和图2揭示的是一种扫地机器人的拖地清洁结构的第一实施例,所述拖地清洁结构包括驱动部1、第一转盘2、第二转盘3和激振部件4,所述拖地清洁结构在使用时,悬挂于扫地机器人主体10的底部,本实施例中,所述拖地清洁结构是通过四个软连接件110悬挂于扫地机器人主体10的底部的,如图4-6中所示,所述软连接件110呈圆柱状,在圆柱状的一端设有用于与扫地机器人主体10活动连接的第一环槽120,在圆柱状的另一端设有用于与所述拖地清洁结构的驱动部1活动连接的第二环槽130;如此连接,可以将所述拖地清洁结构设置为可相对于地面旋转来进行拖地清洁;当然,本实施例中,所述软连接件110可以用弹性联接件代替,所述弹性联接件可以是弹簧等。
如图所示,所述驱动部1包括驱动马达11,所述驱动马达11的两端分别设有第一输出轴111和第二输出轴112,所述第一输出轴111和第二输出轴112与所述第一转盘2和所述第二转盘3的轴心的连线平行,且所述第一输出轴111通过第一传动机构113驱动所述第一转盘2旋转,所述第二输出轴112通过第二传动机构114驱动所述第二转盘3旋转。本实施例中,所述驱动部1还包括齿轮箱13,所述驱动马达11、第一输出轴111、第二输出轴112、第一传动机构113和第二传动机构114均设在齿轮箱13内。
如图2所示,所述激振部件4至少包括第一激振部件41,所述第一激振部件41设在所述第一输出轴111的延长段上,当所述第一输出轴111旋转时,依靠所述第一激振部件41的作用而使所述拖地清洁结构振动。
所述激振部件4还包括第二激振部件(未画图),所述第二激振部件设在所述第二输出轴112的延长段上,当所述第二输出轴112旋转时,依靠所述第二激振部件的作用而使所述拖地清洁结构振动。
优选的,所述激振部件4是偏心轮,通过调整偏心轮的重量可以调整振幅。通过设置激振部件4,从而使拖地清洁结构可以在拖地过程中高频振动,从而达到清除顽渍的目的。
优选的,所述第一传动机构113包括第一蜗杆1131和第一减速齿轮组1132,所述第一蜗杆1131一端与所述第一输出轴111连接,所述第一蜗杆1131另一端与所述第一减速齿轮组1132啮合(图中为了视图的方便,所述第一减速齿轮组1132在图中没有画完整)。
优选的,所述第二传动机构114包括第二蜗杆1141和第二减速齿轮组1142,所述第二蜗杆1141的一端与所述第二输出轴112连接,所述第二蜗杆1141的另一端与所述第二减速齿轮组1142啮合,(图中为了视图的方便,所述第二减速齿轮组1142在图中没有画完整)。
优选的,在所述第一转盘2的下底面上设有第一抹布21;在所述第二转盘3的下底面上设有第二抹布31,所述第一抹布21可以通过第一魔术贴与所述第一转盘2连接,所述第二抹布31可以通过第二魔术贴与所述第二转盘3连接。
请参见图3,图3揭示的是一种扫地机器人的拖地清洁结构的第二实施例,图3所示的实施例与图1和图2所示的实施例相比,其大体结构相同,所不同的是所述驱动马达11的两端分别设有第一输出轴111和第二输出轴112,所述第一输出轴111和第二输出轴112与所述第一转盘2和所述第二转盘3的轴心的连线垂直,且所述第一输出轴111通过第一传动机构113和第二传动机构114分别驱动所述第一转盘2和所述第二转盘3旋转,所述激振部件4设在第二输出轴112上。
同样的,所述激振部件4是偏心轮,通过调整偏心轮的重量可以调整振幅。
- 扫地机器人的拖地清洁结构
- 一种清洁地面的方法、扫地机器人及拖地机器人