一种重负荷多自由度平台
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及动态平台技术领域,尤其涉及一种重负荷多自由度平台。
背景技术
由于多自由度运动平台的研制和发展,涉及机械、轮船、军工、航天、航空等一系列高科技、重负载领域,常见的多自由度平台不能承载太重的负载,刚性能力和稳定性较低,因而重负荷多自由度平台的研制和开发是很有必要的。
发明内容
本发明的目的是:提供一种重负荷多自由度平台,重负载能力增强,提高自由度平台的刚性能力和稳定性。
技术方案:一种重负荷多自由度平台,包括上平台、下平台以及三组电动缸驱动组,所述上平台下端面通过三组电动缸驱动组与下平台相连接,每组所述电动缸驱动组包括伺服电动缸以及丝杆,所述伺服电动缸为大功率伺服电动缸,所述丝杆为大直径丝杆,所述上平台与下平台均为铁架,所述伺服电动缸通过虎克铰与下平台相连接,所述伺服电动缸与虎克铰数量相同。
优选的,所述上平台下端面设置有铰点圆,所述丝杆顶端与铰点圆相铰接。
优选的,所述伺服电动缸采用的电机具体为抱闸式伺服电机。
优选的,所述上平台与下平台上的支撑点处通过点焊接连接。
优选的,每个所述伺服电动缸的导程为20mm。
本发明实现以下有益效果:
1.伺服电动缸采用大功率伺服电机,丝杆采用大直径丝杆,使出力安全系数在三倍以上;
2.上平台以及下平台采用方管铁架焊接形成,并在三组电动缸驱动组支撑处进行密集焊接,使上平台以及下平台达到所需要的刚性,提高自由度平台的刚性;
3.伺服电动缸的电机采用抱闸式伺服电机,在断电或者出现其他意外情况下,平台能立即停止不动,提高平台的安全性能。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
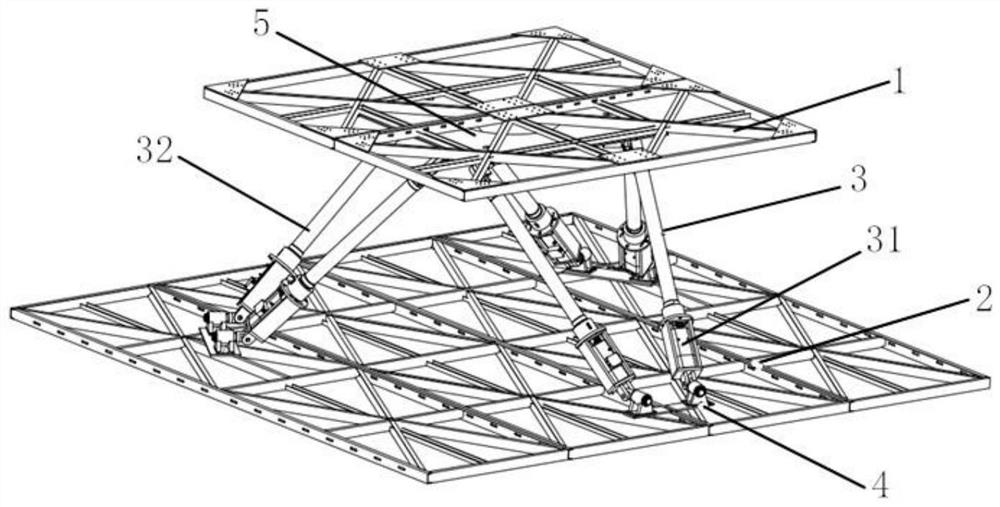
图1为本发明提供的整体结构轴视图。
图中:1.上平台;2.下平台;3.电动缸驱动组;31.伺服电动缸;32.丝杆;4.虎克铰;5.铰点圆。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
参考图1,一种重负荷多自由度平台,包括上平台1、下平台2以及三组电动缸驱动组3,所述上平台1下端面通过三组电动缸驱动组3与下平台2相连接,每组所述电动缸驱动组3包括伺服电动缸31以及丝杆32,所述伺服电动缸31为大功率伺服电动缸,所述丝杆32为大直径丝杆,使整个自由度平台的出力安全系数在通常平台的三倍以上,使平台能承受更大的负载;所述上平台1与下平台2均为铁架,实用铁板进行点焊补强,使自由度平台达到所需要的刚性,保证自由度平台的稳定性;所述伺服电动缸31通过虎克铰4与下平台2相连接,所述伺服电动缸31与虎克铰4数量相同,所述虎克铰4与下平台2螺钉连接,便于拆卸,方便平台的运输。
所述上平台1下端面设置有铰点圆5,上平台1与丝杆32铰接,使平台能够转动正负30度;所述丝杆32顶端与铰点圆5相铰接,便于丝杆32的拆卸,方便平台的搬运。
所述伺服电动缸31采用的电机具体为抱闸式伺服电机,在断电或出现其他意外情况下时,每个抱闸式伺服电会立即抱死滚珠丝杆,使平台立即停止不动,直到来电或者故障处理完毕后自动复位。
所述上平台1与下平台2上的支撑点处通过点焊接连接。
每个所述伺服电动缸31的导程为20mm。
上述实施例只为说明本发明的技术构思及特点,其目的是让熟悉该技术领域的技术人员能够了解本发明的内容并据以实施,并不能以此来限制本发明的保护范围。凡根据本发明精神实质所作出的等同变换或修饰,都应涵盖在本发明的保护范围之内。
- 一种重负荷多自由度平台
- 一种重负荷多自由度平台