车道定位系统以及车道定位方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明是有关于一种车道定位系统以及车道定位方法,且特别是有关于一种车道定位系统以及车道定位方法。
背景技术
目前车辆行驶在高速公路或快速道路上,车辆在车道上的精准定位都需要较为高阶的定位系统,藉以协助驾驶决定何时需要切换车道。尤其自动驾驶车辆更需要仰赖具有高解析度的地图资料以及昂贵的定位系统,例如是使用光学雷达(light detection andranging,LiDAR)。因此,如何对车辆进行精准的车道定位并且降低定位系统成本,是车辆定位系统的重点开发课题之一。
发明内容
本发明提供一种对车辆进行精准的车道定位并且低成本的车道定位系统以及车道定位方法。
本发明的车道定位系统用于对车辆进行车道定位。车道定位系统包括多个影像撷取单元、车辆定位模块以及处理器。多个影像撷取单元分别设置于车辆。所述多个影像撷取单元用以取得车辆右方的第一影像、车辆左方的第二影像以及车辆的前方车道影像。车辆定位模块设置于车辆。车辆定位模块用以取得车辆所在的地理位置。处理器耦接于所述多个影像撷取单元以及车辆定位模块。处理器用以依据对应于地理位置的车道资料判断车辆所在的定位道路的多个车道的数量,依据第一影像、第二影像以及前方车道影像的至少其一对所述多个车道进行标记以产生对应于所述多个车道的多个车道标记值以及车辆的定位标记值,并依据定位标记值对车辆进行车道定位。定位道路是高速公路以及快速道路的至少其中一者。
在本发明的车道定位方法适用于车道定位系统。车道定位系统用于对车辆进行车道定位。车道定位系统包括多个影像撷取单元以及车辆定位模块。车道定位方法包括:藉由所述多个影像撷取单元取得车辆右方的第一影像、车辆左方的第二影像以及车辆的前方车道影像,并藉由车辆定位模块取得车辆所在的地理位置;依据对应于地理位置的车道资料判断车辆所在的定位道路的多个车道的数量;依据第一影像、第二影像以及前方车道影像的至少其一对所述多个车道进行标记以产生对应于所述多个车道的多个车道标记值以及车辆的定位标记值,其中定位道路是高速公路以及快速道路的至少其中一者;以及依据定位标记值对车辆进行车道定位。
基于上述,本发明的车道定位系统以及车道定位方法是依据地理位置判断车道的数量,并依据第一影像、第二影像以及前方车道影像的至少一者产生多个车道标记值以及车辆的定位标记值,并依据定位标记值以及车道标记值对车辆进行车道定位。如此一来,本发明可以实现精准的车道定位。除此之外,本发明的车道定位系统以及车道定位方法是藉由多个影像撷取单元以及车辆定位模块取得车道的数量、车道标记值以及定位标记值。因此,本发明的车道定位系统以及车道定位方法可利用较低的成本来实现。
为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合所附图式作详细说明如下。
附图说明
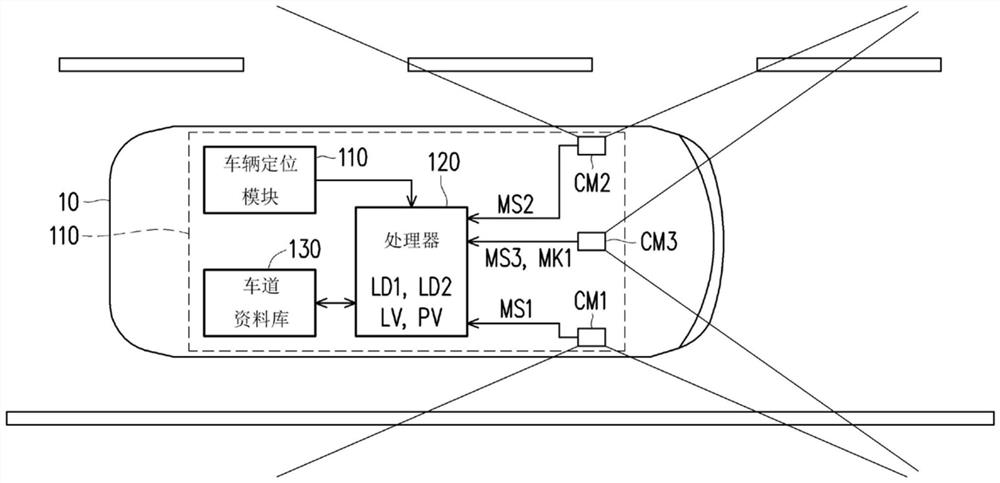
图1是依据本发明一实施例所绘示的车道定位系统的系统示意图。
图2是依据本发明一实施例所绘示的车道定位方法的方法流程图。
图3是依据本发明一实施例所绘示的产生车道标记值的示意图。
图4是依据步骤S130所绘示的方法流程图。
其中:
10:车辆;
100:车道定位系统;
110:车辆定位模块;
120:处理器;
130:车道资料库;
CM1、CM2、CM3:影像撷取单元;
L1、L2、L3、L4、L5:车道;
LD:车道资料;
LV:车道标记值;
MK1:路标影像;
MS1:第一影像;
MS2:第二影像;
MS3:前方车道影像;
PV:定位标记值;
S110、S120、S130、S140:步骤;
S131、S131a、S131b、S132、S133、S134、S135:步骤。
具体实施方式
请同时参考图1以及图2,图1是依据本发明一实施例所绘示的车道定位系统的系统示意图。图2是依据本发明一实施例所绘示的车道定位方法的方法流程图。在本实施例中,车道定位系统100适用于对车辆10进行车道定位。车辆10可以是任何车种的自动驾驶车辆或非自动驾驶车辆。在本实施例中,车道定位系统100包括影像撷取单元CM1~CM3、车辆定位模块110以及处理器120。影像撷取单元CM1~CM3分别设置于车辆10。在步骤S110中,影像撷取单元CM1~CM3取得车辆10右方路面的第一影像MS1、车辆10左方路面的第二影像MS2以及车辆10的前方车道影像MS3。举例来说,影像撷取单元CM1被设置于车辆10的右侧。影像撷取单元CM1取得车辆10右方路面的第一影像MS1。影像撷取单元CM2被设置于车辆10的左侧。影像撷取单元CM2取得车辆10左方路面的第二影像MS2。影像撷取单元CM3例如是被设置于车辆10内部的后视镜上。影像撷取单元CM3取得车辆10的前方车道影像MS3。影像撷取单元CM3可撷取到车辆10前方的视野的所有车道。影像撷取单元CM1~CM3可以是由多个摄影机或至少一组行车记录仪来实现。为了便于说明,本实施例以3个影像撷取单元为例。然本发明影像撷取单元可以是多个,并不本实施例为限。
在一些实施例中,车道定位系统100的影像撷取单元CM1可以会取得车辆10右方路面的第一影像MS1以及部分的前方车道影像MS3。影像撷取单元CM2可以会取得车辆10左方路面的第二影像MS2以及另一部分的前方车道影像MS3。也就是说,车道定位系统100可藉由影像撷取单元CM1、CM2取得第一影像MS1、第二影像MS2以及前方车道影像MS3。
在本实施例中,车辆定位模块110设置于车辆10。在步骤S110中,车辆定位模块110取得车辆10所在的地理位置。在本实施例中,车辆定位模块110可藉由全球定位系统(Global Positioning System,GPS)取得车辆10所在的地理位置。
在本实施例中,处理器120耦接于影像撷取单元CM1~CM3以及车辆定位模块110。在步骤S120中,处理器120依据对应于地理位置的车道资料LD1判断车辆10所在的定位道路的多个车道的数量。在本实施例中,上述车道资料LD1可以来自于车辆定位模块110所提供的地理位置。处理器120可以由地理位置的地图资料获知定位道路的车道资料LD1(本发明并不以此为限)。在步骤S130中,处理器120依据第一影像MS1、第二影像MS2以及前方车道影像MS3的至少其一对车道进行标记以产生对应于车道的车道标记值LV以及车辆10的定位标记值PV。在获知车道标记值LV以及定位标记值PV后,处理器120在步骤S140会依据定位标记值PV以及车道标记值LV对车辆10进行车道定位。在本实施例中,前述的定位道路是高速公路以及快速道路的至少其中一者。也就是说,车道定位系统100可适用于高速公路以及快速道路的车道定位。处理器120例如是中央处理单元(Central Processing Unit,CPU),或是其他可编程化之一般用途或特殊用途的微处理器(Microprocessor)、数位信号处理器(Digital Signal Processor,DSP)、可程序化控制器、专用集成电路(ApplicationSpecific Integrated Circuits,ASIC)、可编程逻辑装置(Programmable Logic Device,PLD)或其他类似装置或这些装置的组合,其可载入并执行电脑程式。
在此值得一提的是,本实施例的车道定位系统10以及车道定位方法是依据地理位置判断车道的数量,并依据第一影像MS1、第二影像MS2以及前方车道影像MS3的至少一者产生多个车道标记值LV以及车辆10的定位标记值PV,并依据车道标记值LV以及定位标记值PV对车辆10进行车道定位。如此一来,本发明可以实现精准的车道定位。
除此之外,本实施例的车道定位系统10以及车道定位方法是藉由影像撷取单元CM1~CM3以及车辆定位模块110取得车道的数量以及车道资讯LD1,藉以产生车道标记值LV以及定位标记值PV。因此,本发明的车道定位系统以及车道定位方法可利用较低的成本来实现。
进一步来说明步骤S120以及S130的实施细节,请同时参考图1、图2、图3以及图4。图3是依据本发明一实施例所绘示的产生车道标记值的示意图。图4是依据步骤S130所绘示的方法流程图。在本实施例中,处理器120在步骤S120中可以依据对应于地理位置的车道资料LD1判断车辆10所在的定位道路具有5个车道L1~L5。
在本实施例中,步骤S130包括步骤S131~S135。在步骤S131中,车道定位系统100会藉由处理器120初使化车道标记值LV以及定位标记值PV。在步骤S131中的步骤S131a中,处理器120会将对应于外线车道(即,车道L1)的车道标记值LV设定为「1」,并且将对应于内线车道(即,车道L5)的车道标记值LV设定为「N」。N等于定位道路的车道L1~L5的数量并且是大于1的正整数。因此对应于内线车道的车道标记值LV被设定为「5」。此外,其余的车道L2~L4的车道标记值LV也被设定。由右到左,车道L2的车道标记值LV被设定为「2」,车道L3的车道标记值LV被设定为「3」,车道L4的车道标记值LV被设定为「4」。在步骤S131a中,处理器120会依据第一影像MS1识别出右侧边线是实线(如,白色实线)的车道L1是外线车道,并将对应于外线车道的车道标记值设定为「1」。车道L2~L4的右侧边线以及左侧边线都是虚线。因此车道L2~L4的车道标记值LV会由右到左依序被设定,并且由「2」开始被递增。也因此,车道L2的车道标记值LV被设定为「2」,车道L3的车道标记值LV被设定为「3」,并且车道L4的车道标记值LV被设定为「4」。
在一些实施例中,处理器120会依据第一影像MS1识别出右侧边线是实线以及左侧边线是虚线的车道L1是外线车道,并将对应于外线车道的车道标记值LV设定为「1」。处理器120会依据第二影像MS2识别出左侧边线是实线(如,黄色实线)以及右侧边线是虚线的车道是内线车道,并将对应于内线车道的车道标记值LV设定为「5」。
在步骤S131中的步骤S131b中,当处理器120依据第一影像MS1以及第二影像MS2的至少其一判断出车辆10行驶在外线车道时,将定位标记值PV设定为「1」。当处理器120依据第一影像MS1以及第二影像MS2的至少其一判断出车辆10行驶在内线车道时,将定位标记值PV设定为「N」,也就是「5」。
此外,当处理器120判断出车辆10没有行驶在内线车道或外线车道时,会依据前方车道影像MS3、第一影像MS1以及第二影像MS2判断车辆10行驶在车道L2~L4的其中之一。举例来说,当处理器120依据第一影像MS1、前方车道影像MS3判断车辆10所行驶的车道是相邻于外线车道的左侧车道时,获知车辆10目前行驶在车道L2。因此处理器120将定位标记值PV设定为「2」。另举例来说,当处理器120依据第二影像MS2、前方车道影像MS3判断车辆10所行驶的车道是相邻于内线车道的右侧车道时,获知车辆10目前行驶在车道L4。因此处理器120将定位标记值PV设定为「4」。再举例来说,当处理器120判断车辆10所行驶的车道的相邻右侧车道不是外线车道,而相邻左侧车道不是内线车道时,则将定位标记值PV设定为「3」。
在本实施例中,定位标记值PV在被设定为「1」的情况下,表示车辆10行驶在车道标记值LV被设定为「1」的车道L1上。定位标记值PV在被设定为「2」的情况下,表示车辆10行驶在车道标记值LV被设定为「2」的车道L2上,依此类推。因此,定位标记值PV可指示出车辆10行驶在与定位标记值PV相同的车道标记值LV的车道上。在本实施例中,车道定位系统100可以在进入定位道路时执行步骤S131。车道定位系统100也可以在进入定位道路的外线车道或内线车道时执行步骤S131。
在步骤S132中,车道定位系统100会藉由处理器120判断车辆10是否切换车道。如果处理器120依据前方车道影像MS3判断出车辆10完全越过左侧虚线/右侧虚线并成功进入隔壁车道时,处理器120获知车辆10已切换车道。车道定位系统100会执行步骤S133。在另一方面,如果处理器120依据前方车道影像MS3判断出车辆10没有完全越过左侧虚线/右侧虚线,处理器120则获知车辆10没有成功地切换车道。车道定位方法则会回到步骤S132。
在步骤S133中,车道定位系统100会藉由处理器120判断车辆10已向左成功地切换一个车道,或已向右成功地切换一个车道。如果处理器120依据前方车道影像MS3判断出车辆10完全越过左侧虚线并成功进入隔壁车道时,车道定位方法进入步骤S134。在步骤S134中,处理器120会将定位标记值PV加1。在本实施例中,步骤S134结束后,车道定位方法会回到步骤S132。
在另一方面,如果处理器120依据前方车道影像MS3判断出车辆10完全越过左侧虚线并成功进入隔壁车道时,车道定位方法进入步骤S135。在步骤S135中,处理器120会将定位标记值减1。步骤S135结束后,车道定位方法会回到步骤S132。
举例来说,如果车辆10由车道L1成功地向左切换到车道L2,定位标记值PV会由「1」被设定为「2」。如果车辆10由车道L2成功地向左切换到车道L3,定位标记值PV会由「2」被设定为「3」。如果车辆10由车道L3成功地向左切换到车道L2,定位标记值PV会由「3」被设定为「2」。由此可知,定位标记值PV可指示出车辆10行驶在与定位标记值PV相同的车道标记值LV的车道上。如此一来,处理器120能够在步骤S140中依据定位标记值PV以及车道标记值LV对车辆10进行车道定位。
请回到图1以及图2的实施例。在本实施例中,影像撷取单元CM1~CM3的至少一者还能够取得车辆10前方的至少一路标影像。举例来说,影像撷取单元CM3除了取得前方车道影像MS3以外,还能够取得一个路标影像MK1。处理器120接收路标影像MK1以及前方车道影像MS3,并依据路标影像MK1以及前方车道影像MS3判断定位道路的实际车道数量,藉以产生关联于路标影像MK1的车道资料LD2。本实施例的路标影像MK1可以是前方影像中的感兴趣区域(region of interest,ROI)的影像。应注意的是,关联于路标影像MK1的车道资料LD2是定位道路的车道的当前实际数量。因此,关联于路标影像MK1的车道资料LD2是较正确的资讯。
在本实施例中,车道定位系统100还包括车道资料库130。车道资料库130耦接于车辆定位模块110以及处理器120。车道资料库130用以储存车道资料,例如对应于地理位置的车道资料LD1及/或关联于路标影像MK1的车道资料LD2。在本实施例中,车道资料库130还会所储存车道资料提供到处理器120。因此,一旦处理器120接收到路标影像MK1,车道资料库130会将关联于路标影像MK1的车道资料LD2提供到处理器120。一旦处理器120接收到车辆定位模块110所取得的地理位置,车道资料库130会将对应于地理位置的车道资料LD1提供到处理器120。
在本实施例中,处理器120还能够比对前方车道影像MS3与车道资料LD1、LD2的至少其一。进一步来说明,处理器120会判断前方车道影像MS3与目前的车道资料LD1、LD2是否一致。当处理器120判断出前方车道影像MS3与目前的车道资料LD1、LD2不一致时,表示目前的车道资料LD1、LD2需要被更新。因此,处理器120会更新目前的车道资料LD1、LD2,并将更新后的车道资料储存在车道资料库130。在另一方面,当处理器120判断出前方车道影像MS3与目前的车道资料LD1、LD2一致时,处理器120不会更新目前的车道资料。
在一些实施例中,车道资料库130可以被设置在云端。因此,车道资料LD1、LD2可以被共同分享到其他的车辆的车道定位系统或被其他车辆的车道定位系统所更新。
综上所述,本发明的车道定位系统以及车道定位方法是依据地理位置判断车道的数量,并依据第一影像、第二影像以及前方车道影像的至少一者产生多个车道标记值以及车辆的定位标记值,并依据定位标记值对车辆以及车道标记值进行车道定位。如此一来,本发明可以实现精准的车道定位。除此之外,本发明的定位系统以及车道定位方法是藉由多个影像撷取单元以及车辆定位模块取得车道的数量、车道标记值以及定位标记值。因此,本发明的车道定位系统以及车道定位方法可利用较低的成本来实现。
虽然本发明已以实施例揭露如上,然其并非用以限定本发明,任何所属技术领域中具有通常知识者,在不脱离本发明的精神和范围内,当可作些许的更动与润饰,故本发明的保护范围当视后附的申请专利范围所界定者为准。
- 车道定位系统以及车道定位方法
- 车道级车辆定位方法、定位系统及智能道钉