拖布机构及清洁机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及智能家居技术领域,尤其涉及一种拖布机构及清洁机器人。
背景技术
随着科技进步和生活水平的提高,清洁机器人其能够实现自动扫地、吸尘等功能而广泛应用于家庭中。
现有的清洁机器人中最为常见的是扫地机器人,扫地机器人只能对地面进行扫地清洁,而不具有拖地功能;为实现清洁机器人的拖地功能,一般在扫地机器人的底板上安装有拖布,且拖布相对扫地机器人的底板静止,拖布跟随清洁机器人的移动而对所经过的区域进行拖地。
然而,上述拖布相对底盘静止,无法对待清洁表面进行往复擦拭,清洁效率低且效果差。
发明内容
本发明实施例提供了一种拖布机构及清洁机器人,其能够对清洁表面进行往复擦拭,提升了清洁效率及效果。
为了实现上述目的,本发明实施例采用如下技术方案:
本发明实施例一方面提供了一种拖布机构,其安装于清洁设备的底板上,所述拖布机构包括至少一个移动安装在所述底板上的拖板以及至少一个主磁体和一个从磁体;所述主磁体和从磁体中的至少一个提供可变磁场,其磁场的强度和/或方向可变;所述从磁体设置在拖板上,且所述从磁体与所述拖板一起运动;至少部分地基于所述主磁体与所述从磁体之间的磁场力,所述主磁体与所述从磁体发生相向和背向的往复运动,使所述拖板相对所述底板往复运动。
进一步的,所述底板上设置有彼此相对的第一拖板和第二拖板;
至少一个所述主磁体设置在所述底板上,所述主磁体位于所述第一拖板和所述第二拖板之间;至少一个第一从磁体设置于所述第一拖板上,至少一个第二从磁体设置于所述第二拖板上;至少部分地基于所述主磁体与所述第一从磁体之间的磁场力,所述主磁体与所述第一从磁体发生相向和背向的往复运动,使所述拖板相对所述底板往复运动;和/或,至少部分地基于所述主磁体与所述第二从磁体之间的磁场力,所述主磁体与所述第二从磁体发生相向和背向的往复运动,使所述拖板相对所述底板往复运动。
进一步的,所述主磁体为电磁铁或永磁体,所述第一从磁体和所述第二从磁体均为永磁体;通过改变通入所述主磁体的电流方向或者相对底板转动所述主磁体改变磁场的方向,使所述第一拖板和所述第二拖板相对所述底板往复运动。
进一步的,所述主磁体为电磁铁,所述第一拖板和所述第二拖板之间设置有复位元件;当所述主磁体具有磁性时,所述主磁体分别与所述第一从磁体、第二从磁体之间具有磁场引力,使所述第一拖板和所述第二拖板克服所述复位元件的回复力而相向运动;反之,当所述主磁体不具有磁性时,所述第一拖板和所述第二拖板在所述复位元件的回复力作用下背向运动。
进一步的,所述底板设置有彼此相对的第一拖板和第二拖板,至少一个所述主磁体设置在所述第一拖板上,至少一个所述从磁体设置在所述第二拖板。
进一步的,至少部分地基于所述主磁体与所述从磁体之间的磁场引力和磁场斥力,使所述第一拖板和所述第二拖板发生相向和背向的往复运动。
进一步的,所述主磁体为电磁铁,所述从磁体为连接杆,且所述从磁体为电磁铁;所述连接杆的第一端固定在所述第二拖板上,所述连接杆的第二端抵接在所述主磁体或者插入所述主磁体内;当所述主磁体与所述从磁体之间具有磁场引力时,所述第一拖板与所述第二拖板相向运动;反之,当所述主磁体与所述从磁体具有磁场斥力时,所述第一拖板与所述第二拖板背向运动。
进一步的,所述主磁体为电磁体,所述第一拖板和所述第二拖板之间设置有复位元件;当所述主磁体具有磁性且所述主磁体与所述从磁体之间具有磁场引力时,使所述第一拖板和所述第二拖板克服所述复位元件的回复力而相向运动;反之,当所述主磁体不具有磁性且所述主磁体与所述从磁体之间不具有磁场引力时,所述第一拖板和所述第二拖板在所述复位元件的回复力作用下背向运动。
进一步的,所述主磁体为电磁铁,所述从磁体为连接杆;所述连接杆的第一端固定在所述第二拖板上,所述连接杆的第二端可抵接在所述主磁体上或者插入所述主磁体内;当所述主磁体具有磁性时,所述主磁体与所述从磁体之间具有磁场引力,使所述第一拖板和所述第二拖板克服所述复位元件的回复力而相向运动;反之,当所述主磁体不具有磁性时,所述第一拖板和所述第二拖板在所述复位元件的回复力作用下背向运动。
本发明实施例另一方面提供了一种清洁机器人,包括所述的拖布机构。
与现有技术相比,本发明实施例提供的拖布机构及清洁机器人具有以下优点;
本发明实施例提供的拖布机构和清洁机器人,其中,拖布机构安装在清洁机器人的底板上,拖布机构包括至少一个主磁体和一个从磁体及移动安装在底板上的至少一个拖板,从磁体设置在拖板上并可与拖板一起运动;至少部分地基于所述主磁体与所述从磁体之间的磁场力,主磁体和从磁体之间可发生相向和背向的往复运动,从而带动拖板相对底板往复运动,进而拖板可对清洁表面进行往复擦拭,可提升对清洁表面的清洁效率及效果。
除了上面所描述的本发明解决的技术问题、构成技术方案的技术特征以及由这些技术方案的技术特征所带来的有益效果外,本发明提供的拖布机构及清洁机器人所能解决的其他技术问题、技术方案中包含的其他技术特征以及这些技术特征带来的有益效果,将在具体实施方式中作出进一步详细的说明。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对本发明实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
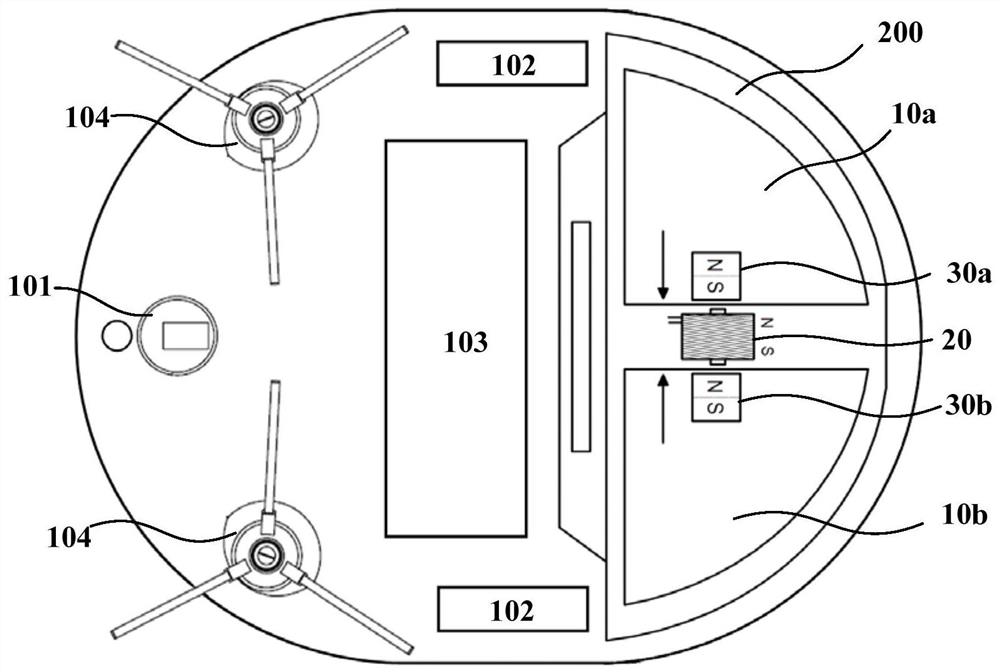
图1a和图1b为本发明实施例提供的清洁机器人的结构示意图;
图2a和图2b为本发明实施例提供的实施例一对应的拖板往复运动示意图;
图3a至图3d为本发明实施例提供的实施例二对应的拖板往复运动示意图;
图4a和图4b为本发明实施例提供的实施例三对应的拖板往复运动示意图;
图5a至图5d为本发明实施例提供的实施例四对应的拖板往复运动示意图;
图6a至图6d为本发明实施例提供的复位弹簧与连接杆配合方案下的拖板运动状态示意图一;
图7a和图7b为本发明实施例提供的复位弹簧与连接杆配合方案下的拖板运动状态示意图二;
图8a为磁场方向随时间变化而突变的示意图;
图8b为磁场方向随时间变化而渐变的示意图;
图8c为磁场强度随时间变化而突变的示意图;
图8d为磁场强度随时间变化而渐变的示意图。
附图标记说明:
10-拖板; 10a-第一拖板; 10b-第二拖板;
20-主磁体; 30-从磁体; 30a-第一从磁体;
30b-第二从磁体; 40-复位元件; 50-连接杆;
60-限位杆; 71-滑轨; 72-滑槽;
100-拖布机构; 101-万向轮; 102-轮组;
103-主刷; 104-边刷; 200-底板。
具体实施方式
为了使本发明的上述目的、特征和优点能够更加明显易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其它实施例,均属于本发明保护的范围。
清洁机器人通常用于对待清洁地面进行清扫,其包括拖布,拖布一般固定设置在清洁机器人的底板200上,拖布相对底板200静止,并随着清洁机器人的移动对地面进行擦拭,拖布只能对清洁机器人移动所经过的区域进行单方向擦拭作业,此种清洁机器人清洁效率低且清洁效果差。
针对上述问题,本发明实施例提供了一种拖布机构100,拖布机构100安装在清洁设备的底板200上,如图1a及图1b所示。拖布机构100包括至少一个移动安装在底板200上的拖板10,使得拖板10相对底板200可滑动;拖布机构100还包括至少一个主磁体20和一个从磁体30;主磁体20和从磁体30中的至少一个提供可变磁场,其磁场的强度和/或方向可变,使主磁体20和从磁体30之间具有变化的磁场力;从磁体30设置在拖板10上,且从磁体30与拖板10一起运动;至少部分地基于主磁体20和从磁体之间的磁场力,主磁体20与从磁体30发生相向和背向的往复运动,使从磁体30带动拖板10相对于固定了主磁体20的底板200往复运动。
具体的,结合图2a、图2b可先对清洁设备(比如,在本实施例中可以是清洁机器人)的结构组成进行介绍。清洁机器人包括控制单元、运动单元、多个驱动单元及环境传感器等,其中,运动单元用于带动清洁机器人移动,其可以是清洁机器人的万向轮101、轮组102、和/或履带(图中未示出)等;运动驱动单元用于驱动运动单元运行,例如,电机;动力驱动单元用于驱动拖布机构中的拖板相对于底板200往复运动。
环境传感器及多个驱动单元分别与控制单元信号连接,环境传感器用于获取清洁机器人作业区域中的障碍物信息,比如可以是碰撞传感器、接近传感器(比如红外对管)、防跌落传感器、摄像头、激光测距仪等;其中,障碍物可以是清洁机器人所在的工作区域内阻碍清洁机器人通行的物体,比如墙、门、家具、宠物、用户等环境中的动物、人和/或非生物。障碍物信息可以包括障碍物位置和/或清洁设备与障碍物之间的距离,还可以包括障碍物的尺寸、空间分布、速度、时间分布等信息。环境传感器将获取的障碍物信息传递至控制单元,控制单元可根据上述障碍物信息控制清洁机器人的移动轨迹,并生成控制指令传输给驱动单元,以控制运动单元的运动状态。
上述驱动单元、控制单元可布置在清洁机器人的壳体内,轮组102、万向轮101可布置在清洁机器人的壳体外侧,壳体包括底板200,轮组102及万向轮101可布置在底板200上。
如图1a和图1b所示并结合图2a,本发明一个实施例中的清洁机器人的底板200上不仅设置有拖布机构100、轮组102、万向轮101,而且在其底板200的前部设置有清扫机构,清扫机构包括边刷104及主刷103,沿清洁机器人前进方向,清扫机构位于底板的下方前侧,而拖布机构100位于底板的下方相对于清扫机构的后侧;在清洁机器人工作过程中,可对待清洁表面先利用清扫机构进行清扫,再进一步利用后面的拖布机构100对待清洁表面进行擦拭,实现对待清洁表面的清扫-擦拭一体清洁,以提升对待清洁表面的清洁效率和效果。当然,在其它实施例中也可以仅采用本发明实施例所介绍的拖布机构,或者采用多个本发明实施例所介绍的相同的/不同的拖布机构。
当然,本发明各实施例的拖布机构不限于清洁机器人,还可以是手持式拖地机或其它清洁设备上的清洁组件。
在本发明一个实施例中,拖板10相对底板200可滑动,可以通过在底板200上设置滑轨71、并在拖板10上设置与滑轨71相配合的滑槽72来实现。拖板10可通过滑槽72安装至底板200上的滑轨71上,并且拖板10在外力的作用下可沿滑轨71滑动。
在本发明一个实施例中,底板200上设置有至少一个主磁体20以及拖板10上设置有至少一个从磁体30,本实施例中的拖布机构中可设置有一个主磁体20,且拖板10上设置有一个从磁体30,从磁体30可与拖板10一起运动;从磁体30与主磁体20靠近设置,使得从磁体30与主磁体20之间产生周期性变化的磁场力(包括磁场引力及磁场斥力),在上述磁场力的作用下,拖板10可相对底板200往复运动,可对待清洁的地面进行往复擦拭。
例如,图1a中,底板200上可只设置有一个拖板10,拖板10中间设置有开口,在底板200上设置有主磁体20,且主磁体20位于拖板10开设的开口内,在拖板10位于开口的边缘处设置有与主磁体20相对的从磁体30;主磁体20提供可变磁场,并且从磁体30与主磁体20之间产生周期性变化的磁场力,可带动拖板10相对于固定了主磁体20的底板200往复运动。可以理解的是,主磁体20也可设置在底板200的边缘位置,拖板10靠近主磁体20的一端设置有从磁体30,从磁体30与主磁体20之间形成周期性变化的磁场力,可带动拖板10相对底板200往复运动。
在本发明一个实施例中,如图1b所示,底板200上设置有第一拖板10a和第二拖板10b,主磁体20设置在底板200上且位于第一拖板10a和第二拖板10b之间,可在第一拖板10a和第二拖板10b上与主磁体20靠近的位置分别设置两个从磁体30a和30b,通过改变主磁体20分别相对于从磁体30a和30b的磁极,使从磁体30a、30b分别与主磁体20之间产生周期性变化的磁场力,从磁体30a、30b可分别带动第一拖板10a和第二拖板10b相向和背向运动,使第一拖板10a和第二拖板10b分别相对底板200形成往复运动。
本实施例中,上述主磁体20和/或从磁体30可提供可变磁场,其磁场方向及强度大小可变;其中,磁场的第一磁极为N极、第二磁极为S极。磁场的方向可变是指,上述主磁体20或从磁体30的磁极方向可发生改变,比如通过对主磁体20按一定频率通以不同方向的直流电、或将主磁体20绕其中心轴旋转等方式改变磁场方向,使主磁体20或从磁体30的磁极在N极和S极之间交替变化,从而使主磁体20与从磁体30之间的磁场力在磁场引力和磁场斥力之间交替变化;因此,改变磁场方向可认为是改变磁极方向。磁场强度大小可变指的是,从磁体30与主磁体20之间的磁场力的大小变化,也包括磁场力由有变无或由无变有,即磁场力在有无之间的交替变化也属于磁场力的大小变化。
本发明中的磁场方向发生改变以及磁场强度大小的变化均既可以是突变也可以是渐变。如图8a至图8d所示,其中纵轴代表磁感应强度,横轴代表时间;在图8a、图8b中,B1、B2分别代表第一磁极和第二磁极对外部的磁感应强度,且B1与B2方向相反;在图8c、图8d中,B0代表主磁体20与从磁体之间的磁感应强度,纵轴的0代表主磁体20与从磁体之间的磁感应强度为0即主磁体与从磁体之间没有磁场力。
如图8a所示,通过对主磁体20或从磁体30的线圈按一定频率交替通以不同方向的直流电使主磁体20与从磁体30之间的磁场方向(即磁极方向)在B1与B2之间交替变化,由于是瞬间变化,因此可以认为是磁场方向的突变(当然由于线圈里会产生自感电动势以阻碍磁通增大,会使磁场方向变化的时间延长,在实际中磁场方向的变化大多属于渐变,但本发明不限定磁极方向变化的具体形式;此处仅是举例说明磁场的方向突变);而将永磁体或电磁铁绕其中心轴旋转使其两侧的磁场方向发生改变或直接对主磁体20和从磁体30中的至少一个的线圈通以一定频率的交流电则如图8b所示,主磁体20与从磁体30之间的磁感应强度逐渐增大到B1后又逐渐减小,然后改变方向,在反方向逐渐增大到B2后又逐渐减小,依此方式周期性循环,则此种情况下的磁场方向属于渐变。
如图8c所示,通过对主磁体20或从磁体30的线圈按一定频率交替通以不同方向的直流电使主磁体20与从磁体30之间在产生磁场和退磁之间交替变化,引起磁场强度的瞬间变化(当然由于线圈里会产生自感电动势以阻碍磁通增大,会使磁场强度或磁感应强度变化的时间延长,在实际中磁场强度或磁感应强度的变化大多属于渐变,但本发明不限定磁场强度大小的变化的具体形式;此处仅是举例说明磁场的强度突变);而对主磁体20或从磁体30的线圈通电使主磁体20与从磁体30之间逐渐产生磁场,然后逐渐减少电流从而使主磁体20与从磁体30之间的磁场逐渐消失,使磁感应强度达到最大值B1后又逐渐减小到0,周期性循环往复,从而使主磁体20与从磁体30之间的磁场的强度(可由磁感应强度表示)发生渐变,可以参照图8d所示。
本实施例提供的拖布机构100,至少部分地基于主磁体20和从磁体30之间周期变化的磁场力,可实现拖板10相对底板200的往复运动;即拖板10相对底板200往复运动的作用力可全部来自主磁体20和从磁体30之间形成的周期变化的磁场力,或者;部分来自主磁体20和从磁体30之间形成的周期变化的磁场力以及部分来自其他作用在拖板10上的非磁场力(比如弹簧、皮筋等提供的弹力,凸轮、曲柄等提供的支撑力等不同于磁场力的作用力),在磁场力和非磁场力共同作用下使拖板10相对底板200往复运动。
对于主磁体20和从磁体30之间形成周期变化的磁场力,例如,可在主磁体20和从磁体30之间形成具有周期性变化的磁场斥力和磁场引力可促使拖板10相对底板200往复运动,并可周期性循环往复。另外,对于本实施例中形成拖板10相对底板200往复运动的作用力,可包括磁场力以及其他非磁场力,例如,磁场力和弹性元件的回复力,即磁场力可作为拖板10相对于底板200的往复运动整个过程的部分行程运动(比如可以是磁场引力引起的回程运动或磁场斥力引起的去程运动,也可以是部分回程运动和/或部分去程运动),回复力可作为拖板10相对于底板200的往复运动整个过程的其它行程运动,进而共同配合形成拖板10相对底板200的往复运动。本实施例中,拖板10在上述不同作用力配合作用下,可相对底板200形成往复运动,进而提升对擦拭地面的清洁效率。
本实施例根据主磁体20及从磁体30的安装位置以及主磁体20的磁场变化方式,分为以下实施例对本方案进行介绍:
实施例一:如图2a所示,本实施中底板200上设置有至少一个主磁体20,底板200上设置有彼此相对的第一拖板10a和第二拖板10b,第一拖板10a上设置有至少一个第一从磁体30a,第二拖板10b上设置有至少一个第二从磁体30b,第一从磁体30a、第二从磁体30b分别靠近主磁体20设置,主磁体20可位于第一拖板10a和第二拖板10b之间。主磁体20提供可变磁场,或两个从磁体即第一从磁体30a和第二从磁体30b提供可变磁场;随着可变磁场的周期性变化,第一从磁体30a和第二从磁体30b分别与主磁体20产生磁场斥力和磁场引力(第一从磁体30a与第二从磁体30b可以同时与主磁体20产生磁场引力和/或磁场斥力,也可以分别与主磁体20产生不同步的磁场引力和/或磁场斥力),从而带动第一拖板10a和第二拖板10b相对底板200进行往复运动。
具体地,主磁体20可以为电磁铁,其可固定在底板200上,主磁体20位于第一拖板10a和第二拖板10b之间,第一从磁体30a和第二从磁体30b可分别固定在第一拖板10a和第二拖板10b上,且靠近主磁体20设置,以使主磁体20与第一从磁体30a和第二从磁体30b之间产生周期变化的磁场力,且能使从磁体30感受到足够大的磁场力从而能被磁场力带动,并带动拖板运动。在图2a中,主磁体20的S极与第一从磁体30a的S极相对,主磁体20的N极与第二从磁体30b的N极相对,此时主磁体20与第一从磁体30a之间产生磁场斥力,可带动第一拖板10a远离主磁体20移动;主磁体20与第二从磁体30b之间产生磁场斥力,可带动第二拖板10b远离主磁体20移动,进而实现了第一拖板10a和第二拖板10b的背向运动。具体的,上述实施例中的第一从磁体30a和第二从磁体30b可以是永磁体或持续通以恒定方向的电流的电磁铁,因此第一从磁体30a和第二从磁体30b的磁极在整个运动过程中保持不变。
如图2b所示,通过改变通入主磁体20的电流方向,可使主磁体20两端的磁极发生变化,即主磁体20的N极与第一从磁体30a的S极相对,主磁体20的S极与第二从磁体30b的N极相对,从而改变了主磁体与从磁体之间的磁场方向,此时主磁体20与第一从磁体30a之间产生磁场引力,可带动第一拖板10a朝向主磁体20移动;主磁体20与第二从磁体30b之间产生磁场引力,可带动第二拖板10b朝向主磁体20移动,进而实现了第一拖板10a和第二拖板10b的相向运动。
进一步的,主磁体20为电磁铁,若在初始时刻,主磁体20的N极与第一从磁体30a的S极相对,主磁体20的S极与第二从磁体30b的S极相对,此时主磁体20与第一从磁体30a之间具有磁场引力,使得第一从磁体30a带动第一拖板10a相对主磁体20相向运动,主磁体20与第二从磁体30b之间具有磁场斥力,使得第二从磁体30b带动第二拖板10b相对主磁体20背向运动。改变通入电磁铁的电流方向改变主磁体20的磁场方向,使主磁体20的S极与第一从磁体30a的S极相对,主磁体20的N极与第二从磁体30b的S极相对,使得第一从磁体30a带动第一拖板10a、第二从磁体30b带动第二拖板10b分别相对主磁体20背向、相向运动。如此周期性循环往复,主磁体20总是与两个从磁体分别具有磁场引力和磁场斥力,使得第一拖板10a和第二拖板10b相对于底板200始终朝向同一个方向运动,这也是一种第一拖板10a和第二拖板10b相对底板200往复运动的方式,虽然第一拖板10a与第二拖板10b之间没有相对地往复运动。
另外,在上述实施例的基础上,主磁体20均为电磁铁并采用通过改变通入电磁铁的电流方向以改变主磁体20两端的磁极,还可以是电磁铁可相对底板200转动,通过旋转电磁铁,改变主磁体20与从磁体30相对端的磁极,同样可以在从磁体30与主磁体20之间产生周期变化的磁场引力及磁场斥力,使第一拖板10a和第二拖板10b分别相对底板200往复运动。
实施例二:如图3a至图3d所示,本实施例中主磁体20、第一从磁体30a及第二从磁体30b均可以是永磁体;主磁体20布置在底板200上,并相对底板200可转动。第一从磁体30a设置在第一拖板10a上,第二从磁体30b设置在第二拖板10b上,且第一从磁体30a和第二从磁体30b位于主磁体20的两侧,在主磁体30绕其旋转轴转动过程中,使得第一从磁体30a、第二从磁体30b分别与主磁体20之间具有周期变化的磁场力。
如图3a所示,第一从磁体30a位于主磁体20的左侧,第一从磁体30a的S极与主磁体20的N极相对,在第一从磁体30a与主磁体20之间具有磁场引力,带动第一拖板10a朝向右侧移动(向主磁体20靠拢);第二从磁体30b位于主磁体20的右侧,第二从磁体30b的N极与主磁体20的S极相对,在第二从磁体30b与主磁体20之间具有磁场引力,带动第二拖板10b朝向左侧移动(向主磁体20靠拢);进而可实现第一拖板10a和第二拖板10b相向运动。
如图3b所示,沿垂直于纸面的旋转轴继续旋转主磁体20(如图3b中主磁体20上的箭头方向),使主磁体20相对底板200转动,从而改变主磁体20的磁场方向,以改变第一拖板10a和第二拖板10b的运动状态,使第一拖板10a和第二拖板10b背向运动。具体的,在清洁机器人的壳体内部设置有用于带动主磁体20相对底板200旋转的驱动单元,例如,可将主磁体20与壳体内的电机连接,电机带动主磁体20转动。此时,第一从磁体30a的S极与主磁体20的S极相对,此时在第一从磁体30a与主磁体20之间具有磁场斥力,带动第一拖板10a朝向左侧移动(远离主磁体20);第二从磁体30b的N极与主磁体20的N极相对,此时在第二从磁体30b与主磁体20之间具有磁场斥力,带动第二拖板10b朝向右侧移动(远离主磁体20);进而可实现第一拖板10a和第二拖板10b背向运动。通过控制电机带动主磁体20旋转,可使第一拖板10a和第二拖板10b相对底板200进行周期性循环的往复运动。
进一步的,如图3c所示,主磁体20设置在第一从磁体30a和第二从磁体30b之间,且主磁体20设置在底板200上并相对底板200可转动;其中,主磁体20的N极可以与第一从磁体30a的S极相对,此时主磁体20和第一从磁体30a之间具有磁场引力,可使第一拖板10a朝向右侧移动(向主磁体20靠拢);主磁体20的S极可以与第二从磁体30b的S极相对,主磁体20和第二从磁体30b之间具有磁场斥力,可使第二拖板10b朝向右侧移动(远离主磁体20);进而可实现第一拖板10a和第二拖板10b共同朝向图3c的右侧运动。
沿垂直于纸面的旋转轴继续旋转主磁体20(如图3b中主磁体20上的箭头方向),如图3d所示,使得主磁体20的S极与第一从磁体30a的S极相对,此时主磁体20和第一从磁体30a之间具有磁场斥力,使第一拖板10a朝向左侧移动(远离主磁体20);主磁体20的N极可以与第二从磁体30b的S极相对,此时主磁体20和第二从磁体30b之间具有磁场引力,使第二拖板10b朝向左侧移动(向主磁体20靠拢);进而可实现第一拖板10a和第二拖板10b共同朝向左侧移动,进而实现了第一拖板10a和第二拖板10b分别相对底板200的往复运动。
实施例三、如图4a所示,至少一个主磁体20设置在底板200上,主磁体20可以是电磁铁,第一从磁体30a固定设置于第一拖板10a上,第二从磁体30b固定设置于第二拖板10b上,第一从磁体30a及第二从磁体30b分别靠近主磁体20设置,使得主磁体20位于第一拖板10a和第二拖板10b之间,并分别与第一从磁体30a和第二从磁体30b具有磁场引力。另外,第一拖板10a和第二拖板10b之间还设置有复位元件40,复位元件40可以是螺旋弹簧、弹片、皮筋、磁力原件等各种能提供回复力的配件、组件,复位元件40可以呈自然状态安装在第一拖板10a和第二拖板10b之间。当主磁体20通入电流时,其产生磁场使主磁体20具有磁性,第一从磁体30a和第二从磁体30b均可以采用软磁材料、永磁体以及未通入电流的电磁铁,在主磁体20具有磁性时,第一从磁体30a和第二从磁体30b可被吸引靠近主磁体20,并带动第一拖板10a和第二拖板10b克服复位元件40的回复力相向运动。
如图4b所示,当主磁体20不具有磁性时,第一从磁体30a和第二从磁体30b与主磁体20间的磁场引力消失,此时,第一拖板10a和第二拖板10b在复位元件40的回复力作用下,可使第一拖板10a和第二拖板10b背向运动。通过对主磁体20通入电流的周期性通断,可使第一拖板10a和第二拖板10b相对底板200发生周期性往复运动。
实施例四、本实施中在底板200上设置有第一拖板10a和第二拖板10b,且第一拖板10a和/或第二拖板10b可相对于底板200运动;在该可相对于底板200运动的拖板上固定设置至少一个从磁体30;在另外一个拖板上固定设置至少一个主磁体20,各主磁体20和各从磁体30彼此靠近相对设置,通过改变主磁体20的磁场方向或者通过磁场强度变化,使主磁体20与从磁体30之间具有周期变化的磁场力,使第一拖板10a和第二拖板10b之间可相对彼此相向运动或者背向运动;同时,两个拖板相对底板200周期性循环往复运动,可对清洁表面反复擦拭,提升清洁效率及效果。
具体的,参阅图5a和图5b,底板200上设置有可相对于底板200运动的第一拖板10a和第二拖板10b,可在第一拖板10a上固定设置从磁体30,在第二拖板10b上固定设置主磁体20,通过改变从磁体30的磁场方向或者改变主磁体20的磁场方向,可使从磁体30和主磁体20之间具有周期变化的磁场引力或者磁场斥力,可使第一拖板10a和第二拖板10b发生相向及背向周期性往复运动。例如,如图5a中所示,第一拖板10a上设置有从磁体30,从磁体30可以是永磁铁;第二拖板10b上设置有主磁体20,主磁体20可以是电磁铁;当从磁体30的S极与主磁体20的N极相对时,如图5a所示,在从磁体30和主磁体20之间的磁场引力可带动第一拖板10a和第二拖板10b相向运动。
若改变通入主磁体20的电流方向,可以改变其磁场方向,此时从磁体30的S极与主磁体20的S极相对,如图5b所示,可在从磁体30和主磁体20之间产生磁场斥力,可带动第一拖板10a和第二拖板10b背向运动。通过控制主磁体20的电流变化的周期,可在主磁体20和从磁体30之间产生周期变化的磁场引力和磁场斥力,使第一拖板10a与第二拖板10b之间发生相向运动和背向运动,同时使第一拖板10a和第二拖板10b中的至少一个相对底板200发生周期性往复运动。
可以理解的是,上述主磁体20和从磁体30也可以均为永磁铁,可将主磁体20或者从磁体30旋转设置在拖板上,以改变从磁体30或主磁体20的磁场方向,并在主磁体20和从磁体30之间产生周期变化的磁场引力或者磁场斥力,以使第一拖板10a和第二拖板10b中的至少一个相对底板200可周期性往复运动。或者,第一拖板10a上设置的主磁体20为电磁铁,第二拖板10b上设置的从磁体30也为电磁铁,且主磁体20靠近从磁体30设置,并可在主磁体20和从磁体30之间产生磁场引力或者磁场斥力。
在其它的示例中,在底板200上设置有第一拖板10a和第二拖板10b,且第一拖板10a和/或第二拖板10b可相对于底板200运动;在第一拖板10a上固定设置至少一个从磁体;在第二拖板10b上固定设置至少一个主磁体20,如图5c所示,其中,从磁体设计成杆状,即从磁体为连接杆50,连接杆50的第一端固定在第一拖板10a上,其第二端可在第一拖板10a与第二拖板10b靠近的情况下抵接在主磁体20的端面上或插入主磁体20上与连接杆50相匹配的凹槽或通孔内;另外,主磁体20可以是电磁铁,其可以设置有与连接杆50的第二端相匹配的凹槽或通孔。下面以主磁体20上相对于连接杆50的一端设置有与连接杆50相匹配的通孔为例进行说明。在第一拖板10a与第二拖板10b靠近的情况下,连接杆50的第二端可插入主磁体20的通孔内。连接杆50的第一端与主磁体20相对,如果两端磁极相反,则连接杆50与主磁体20之间具有磁场引力,如图5c所示,此时第一拖板10a和第二拖板10b发生相向运动。若改变主磁体20或从磁体的磁场方向,使主磁体20和从磁体之间具有磁场斥力,此时第一拖板10a和第二拖板10b发生背向运动,如图5d所示。控制磁场方向进行周期变化,可使第一拖板10a和第二拖板10b相对底板200发生周期性往复运动。
在上述实施例的基础上,本实施例中的在第一拖板10a和第二拖板10b之间还可设置复位元件40,如图6a、图6b所示。复位元件40的具体形式如上述实施例所述,此处不赘述。在本例中以螺旋弹簧为例说明复位元件40的作用;复位元件40可呈自然状态安装在第一拖板10a和第二拖板10b之间,比如复位元件40的一端与第一拖板10a抵接,另一端与第二拖板10b抵接。
当作为主磁体20的电磁铁通入电流(本发明所述的对电磁铁通入电流,即对围绕电磁铁的线圈通电流)时,主磁体20产生磁场,此时在主磁体20和从磁体之间产生磁场引力,并使第一拖板10a和第二拖板10b克服复位元件40的回复力发生相向运动。当断开通入主磁体20的电流时,此时主磁体20不具有磁性,第一拖板10a和第二拖板10b在复位元件40的回复力的作用下发生背向运动。通过控制通入主磁体20的电流周期性变化,第一拖板10a和第二拖板10b可相对底板200发生周期往复运动。
如图6a所示,当作为主磁体20的电磁铁通入电流时,主磁体20产生磁场,此时在主磁体20和连接杆50(同上例,连接杆50即从磁体)之间产生磁场引力,并使第一拖板10a和第二拖板10b克服复位元件40的回复力发生相向运动。
如图6b所示,当断开通入主磁体20的电流时,主磁体20的磁场消失,主磁体20此时不再具有磁性,第一拖板10a和第二拖板10b在复位元件40的回复力的作用下背向运动。通过对主磁体20通入周期性变化的电流控制磁场周期性变化,带动第一拖板10a和第二拖板10b可相对底板200进行周期性往复运动。可以理解的是,上述复位元件40也可套接在连接杆50上,如图6c和图6d所示,比如复位元件40的一端与主磁体20的端面抵接,另一端可抵接在连接杆50的帽端上。
如图7a和图7b所示,本发明一个实施例中的第一拖板10a上设置的从磁体30为电磁铁,第二拖板10b上设置的主磁体20为电磁铁,且在主磁体20和从磁体30之间设置有限位杆60,限位杆60的两端分别套接在主磁体20和从磁体30上,对主磁体20和从磁体30的运动起到导向作用,在主磁体20和从磁体30之间产生的磁场力以及复位元件40的回复力的作用下,主磁体20和从磁体30只能沿着限位杆60滑动(在图7a、7b中是指只有左右方向的运动),而不会发生错位运动(所谓错位运动在图7a、7b中是指含有上下方向的运动分量)。在主磁体20和从磁体30发生相向运动过程中,为防止从磁体30和主磁体20在磁场引力作用下吸附在一起,导致从磁体30与主磁体20之间、以及第一拖板10a与第二拖板10b之间发生分离困难的情况,本实施例中,在限位杆60上设置有限位凸缘或档位(图中未示出),用于限定从磁体30及主磁体20之间的最近距离(比如3~6cm),防止从磁体30与主磁体20吸到一起;在另外的实施例中,还可以通过将从磁体30和主磁体20中的至少一个设置在距离第一拖板10a、第二拖板10b相对侧边缘稍远的位置,使其不容易吸附到一起,从而在不使用限位杆60的情况下也可以达到限定从磁体30与主磁体20之间的最近距离的作用。
本发明一个实施例还提供了一种清洁机器人,包括上述实施例中任一拖布机构;其中,拖布机构100安装在清洁机器人的底板200上,拖布机构100包括至少一个移动安装在底板200上的拖板10以及至少一个主磁体20和一个从磁体30,所述主磁体和从磁体中的至少一个提供可变磁场,其磁场的强度和/或方向可变,从磁体30设置在拖板10上并可与拖板10一起运动;至少部分地基于主磁体20与从磁体30之间的磁场力,主磁体20和从磁体30发生相向和背向的往复运动(即周期性循环往复运动),从而带动拖板10相对底板200往复运动,进而拖板10可对清洁表面进行往复擦拭,可提升对清洁表面的清洁效率及效果。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 拖布清洁机构、清洁机器人基站以及清洁机器人系统
- 升降拖布板机构及清洁机器人