一种智能压电振动能量采集器
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及振动能量采集技术领域,具体涉及一种智能压电振动能量采集器。
背景技术
压电振动能量采集器是利用压电材料的正压电效应,能够将环境当中的废弃振动能量转换为可利用的电能。目前已有的悬臂梁压电能量采集器当中的悬臂梁的外伸长度都是固定的。但外激励源(载体)的振动频率并非单一不变,在外激励源(载体)的频率变化时,此时常见的采集装置无法随时的感知外激励的频率大小,更无法检测到频率后作出相应的调节,使能源的收集率大大降低。
公开号CN103036478A的中国发明专利申请《带有弹性放大机构的高效宽频带振动能量采集器》中提出的能量采集器可以实现放大基座的微弱振动位移,从而提高压电振子的能量转化效率。公开号CN105610347A的中国发明专利申请《一种非线性宽频压电振动能量采集器》中,通过弹性放大机构与双稳态压电振动能量采集器组成一个两自由度非线性振动系统,可以调节两个永磁铁间隙,进而拓宽双稳态压电振动能量采集器的工作频带,来实现对振动能量的高效采集。公开号CN210839391U的中国专利《一种悬臂梁式非线性压电振动能量采集器》中公开了悬臂梁的外伸长度能够手动调节,从而改变悬臂梁的固有频率,使能量采集器与外部激励源更有效的匹配。
现有技术的主要问题是,在外部环境激励变化时,悬臂梁的长度是固定的或者只能通过手动调节方式对悬臂梁的长度进行调节,无法实现自动调节,手动调节不方便,且只能根据经验粗调,易导致能量收集效率不理想。
发明内容
为了解决现有压电振动能量采集器能量收集的效率较低的问题,本发明提供一种智能压电振动能量采集器。
本发明为解决技术问题所采用的技术方案如下:
一种智能压电振动能量采集器,包括压电振动能量采集装置,所述采集装置包括外伸长度能够沿自身长度方向调节的悬臂梁,其特征在于,所述能量采集器还包括频率传感器、控制处理器和步进电机;频率传感器安装在压电振动能量采集装置上,能够探测外激励源的振动频率得到振动频率信息并将振动频率信息发送至控制处理器;控制处理器能够根据振动频率信息通过控制步进电机调节悬臂梁的外伸长度,使压电振动能量采集装置固有频率接近或达到能够与外部激励源共振的频率。本发明的有益效果是:
本发明的一种智能压电振动能量采集器在外部环境激励变化时,对外激励振动频率的检测感知,自动调节悬臂梁的外伸长度,及时地对能量采集系统的结构参数进行智能调节,以便其固有频率与外激励的频率匹配,本发明通过改变悬臂梁式压电振动能量采集器的悬臂梁的外伸长度,使悬臂梁的固有频率与外激励的频率匹配,达到拓宽压电振动能量采集器工作频带的目的,提高能量收集的效率。
附图说明
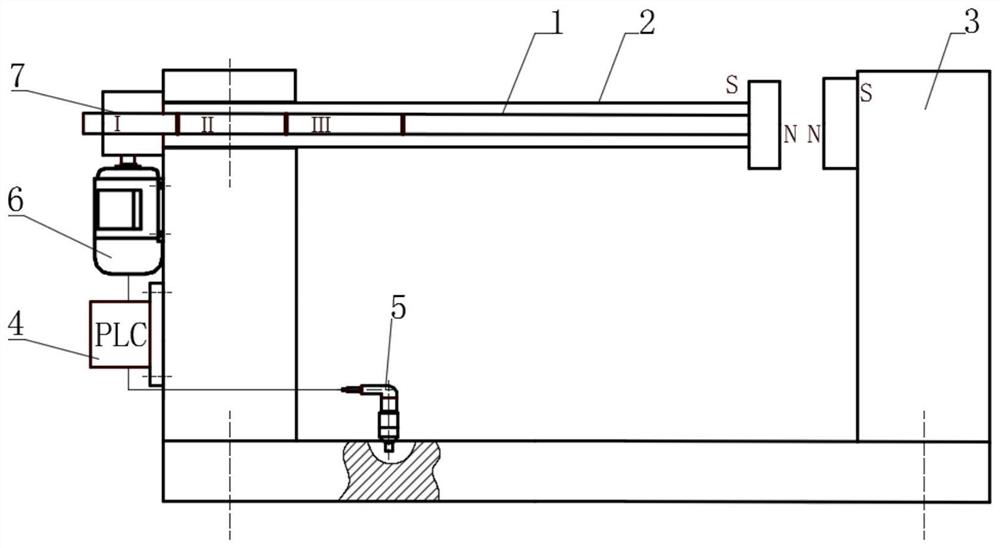
图1为本发明一种智能压电振动能量采集器的结构示意图。
图2为本发明一种智能压电振动能量采集器的局部结构图。
图3为本发明一种智能压电振动能量采集器的传动装置立体图。
图4为本发明一种智能压电振动能量采集器的悬臂梁接口槽装配主视图。
图5为本发明一种智能压电振动能量采集器的悬臂梁接口槽装配左视图。
图6为本发明一种智能压电振动能量采集器的调控原理图
图7为本发明一种智能压电振动能量采集器的工作流程图。
图中:1、悬臂梁,2、压电双晶陶瓷片,3、支撑框,4、PLC控制器,5、频率传感器,6、步进电机,7、传动装置,101、金属基板,102、齿条,103、第一永磁铁,104、第二永磁铁,201、上压电陶瓷片,202、下压电陶瓷片,301、左侧板,302、右侧板,303、左侧底部紧固螺钉的轴线,304、右侧底部紧固螺钉的轴线,305、压轮,306、左侧顶部紧固螺钉的轴线,307、底板,401、第一螺钉的轴线,601、第二螺钉的轴线,701、齿轮。
具体实施方式
下面结合附图和实施例对本发明做进一步详细说明。
一种智能压电振动能量采集器,包括压电振动能量采集装置,频率传感器5、控制处理器和步进电机6。压电振动能量采集装置包括悬臂梁,悬臂梁的外伸长度能够沿自身长度方向调节。频率传感器5安装在压电振动能量采集装置上,频率传感器5能够探测外激励源的振动频率得到振动频率信息,频率传感器5能够发送其探测得到的振动频率信息至控制处理器。步进电机6通过转动能够调节悬臂梁1的外伸长度。控制处理器能够控制步进电机6转动,控制处理器能够根据振动频率信息通过控制步进电机6调节悬臂梁1的外伸长度。通过调节悬臂梁1外伸长度,使压电振动能量采集装置固有频率接近或达到共振频率,以提高压电振动能量采集装置的能量采集效率。
优选的是通过调节悬臂梁1外伸长度,压电振动能量采集装置固有频率达到能够与外部激励源共振的频率范围。
上述控制处理器的一种实现方式是:控制处理器上载有至少两个频段,控制处理器能够确定频率传感器5发送的振动频率信息位于哪个频段,并根据所位于的频段控制步进电机6转动以调节悬臂梁1外伸长度。频段为压电振动能量采集装置固有频率范围值,即,悬臂梁1具有至少两个伸出长度范围,伸出长度范围的数量和频段的数量相同,伸出长度范围和频段一一对应设置,每个伸出长度范围对应一个压电振动能量采集装置固有频率范围,控制处理器上载有悬臂梁1不同伸出长度范围所对应的压电振动能量采集装置固有频率范围值,控制处理器能够判断振动频率信息属于/最接近哪一个压电振动能量采集装置固有频率范围值、并根据判断结果控制步进电机6转动以调节悬臂梁1外伸长度,使悬臂梁1外伸长度达到对应的伸出长度范围,此时压电振动能量采集装置固有频率范围值与外激励源的振动频率更加接近甚至能够共振。
上述控制处理器的另一种实现方式是:控制处理器根据接收的振动频率信息计算能够与该振动频率信息共振的压电振动能量采集装置固有频率ω
其中,E为悬臂梁1的弹性模量,I为悬臂梁1截面惯性矩,m
上述压电振动能量采集装置包括悬臂梁1、物块(又称集中质量块或悬臂端物块)、支撑框3和传动装置7,结构如图1和图2。
悬臂梁1能够沿其长度方向移动,通过沿其长度方向移动改变其外伸长度。悬臂梁1是由低磁不锈钢制成,包括压电双晶陶瓷片2和金属基板101,压电双晶陶瓷片2包括第一压电陶瓷片和第二压电陶瓷片,双晶悬臂梁1由结构尺寸、材料性质完全相同、极化方向相反、压电系数大的第一压电陶瓷片和第二压电陶瓷片经过高强度粘结胶在高温固化之后黏结在压电双晶悬臂梁1的金属基板101上下两个表面构成。第一压电陶瓷片和第二压电陶瓷片在电学上串联连接,压电双晶陶瓷片2与外部负载电阻相连接构成回路,实现对外部负载电阻的供电功能。本实施例中,如图1所示的“Ⅰ”、“Ⅱ”和“Ⅲ”,将悬臂梁1的悬臂可调节部分等尺寸分为Ⅰ、Ⅱ、Ⅲ段,Ⅰ、Ⅱ、Ⅲ段长度相等。
集中质量块位于悬臂梁1伸出端端部,集中质量块连接伸出端的端面,集中质量块采用第一永磁铁103。
传动装置7设置在悬臂梁1的固定侧端,传动装置7包括齿轮701和齿条102,如图3,齿条102固定在悬臂梁1上,齿条102具体沿悬臂梁1长度方向设置,齿条102啮合齿轮701,齿轮701连接步进电机6,通过步进电机6提供驱动力依靠齿轮701与齿条102的传动装置7实现对悬臂梁1外伸端长度的控制。
支撑框3为U型,支撑框3包括左侧板301、右侧板302、左侧底部紧固螺钉、右侧底部紧固螺钉、压轮305、底板307。如图4和图5,左侧板301开一个连接滑槽接口称为接口槽,小轮均匀分布一排组成压轮305,压轮305通过胶粘固定在接口槽内部上、下面,压轮305上带有橡胶套,橡胶套上有防滑纹,易于使压轮305将悬臂梁1压紧,左侧板301由左侧底部紧固螺钉与底板307固定,压轮305与悬臂梁1的压紧程度通过左侧顶部紧固螺钉实现调节。右侧板302由右侧底部紧固螺钉与底板307固定。右侧板302上固定有第二永磁铁104,第二永磁铁104对应第一永磁铁103设置,第二永磁铁104朝向第一永磁铁103的面的磁性与第一永磁铁103朝向第二永磁铁104的面的磁性相同。
支撑框3底板307上安装有频率传感器5,若支撑框3为一体成型结构,也可设置在左侧板301或右侧板302上。控制处理器采用PLC控制器4,PLC控制器4可通过第一螺钉固定在左侧板301上。步进电机6通过第二螺钉固定在左侧板301上,传动装置7由与步进电机6相连接的齿轮701和固定在悬臂梁1上的齿条102啮合进行传动。图1和图2中仅用虚线示出各个螺钉安装位置所在直线,未示出螺钉。频率传感器5用于检测载体(如飞行器)的振动频率,频率传感器5通过信息连接线连接PLC控制器4,PLC控制器4通过信息连接线连接步进电机6。频率传感器5将采集的振动频率信息通过信息连接线传递给PLC控制器4,PLC控制器4输出电机控制信息,电机控制信息由信息连接线传递给步进电机6。
一种智能压电振动能量采集器能将检测到的外激励源的振动频率划分为低、中、高频三个频段,频率传感器5检测到的外激励源的振动频率传递给PLC控制器4后,PLC控制器4根据悬臂梁1当前的位置,给步进电机6发出指令(即电机控制信息),通过正转(对应悬臂梁1向外伸出)或反转(对应悬臂梁1向内缩进)以及转动圈数,利用与电机输出轴相连的齿轮701和与悬臂梁1连接的齿条102传动使悬臂梁1达到期望的三个位置(Ⅰ、Ⅱ、Ⅲ段)之一,使压电振动能量采集装置的固有频率与载体运动频率相配匹即接近共振条件,从而使能量采集效率最大化。如图6,PLC控制器4包括A/D模块和定位模块,步进电机6能够通过转动实现悬臂梁1Ⅰ限位(Ⅰ段)、悬臂梁1Ⅱ限位(Ⅱ段)和悬臂梁1Ⅲ限位(Ⅲ段)。当传感器检测到外激励源的频率处于低频频段(优选的是包括外激励源的频率低于低频频段)时,PLC控制器4配合步进电机6和传动装置7可以自动调节悬臂梁1的悬臂位置达到最外端即Ⅰ段;当检测到外激励源的频率处于中频频段时,PLC控制器4判断其属于中频频段悬臂梁1Ⅱ限位频率,PLC控制器4配合步进电机6和传动装置7能够自动调节悬臂梁1压电振动采集器的悬臂位置达到中间限定位置即Ⅱ段;当检测到外激励源的频率处于高频频段(优选的是包括外激励源的频率高于高频频段)时,PLC控制器4配合步进电机6和传动装置7改变悬臂梁1压电振动采集器的悬臂位置达到限定位置的最内端即Ⅲ段。本发明采用智能检测与自动调节技术,通过可编程逻辑控制器进行输入采样检测、用户程序执行检测及输出控制的流程设计,使悬臂梁式压电振动能量采集器能感知到外激励的振动频率变化,并能够自动调节其外伸长度,达到智能改变采集器的固有频率,使其与外激励的振动频率相匹配。具体过程如图7,频率传感器5测量载体振动的频率后发送至PLC控制器4的A/D模块进行数据转换,然后经定位模块处理判断,定位模块判断其是否属于低频频段即悬臂梁1Ⅰ限位频率,若为是则控制步进电机6工作,若为否则定位模块再判断其属于中频频段即悬臂梁1Ⅱ限位频率,若为是则控制步进电机6工作,若为否则属于高频频段即悬臂梁1Ⅲ限位频率,控制步进电机6工作,通过步进电机6工作调整悬臂梁1长度。
本发明依据的原理为:悬臂梁1的刚度系数
本发明在外部环境激励变化时,通过外激励振动频率的检测感知,自动调节悬臂梁1的外伸长度,及时地对能量采集系统的结构参数进行智能调节,以便其固有频率与外激励的频率匹配。本发明通过改变悬臂梁式压电振动能量采集器的悬臂梁1外伸的长度,使悬臂梁1的固有频率与外激励的频率匹配,达到拓宽压电振动能量采集器工作频带的目的,提高能量收集效率。
以上所述仅是本发明的优选实施方式,上述控制处理器的功能实现方式、压电振动能量采集装置的具体结构等均仅为一种举例。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 一种智能压电振动能量采集器
- 一种环形宽频压电多维振动能量采集器