确定POI坐标的方法、装置、存储介质及电子设备
文献发布时间:2023-06-19 11:54:11
技术领域
本公开涉及计算机技术领域,具体地,涉及一种确定POI坐标的方法、装置、存储介质及电子设备。
背景技术
在外卖运送过程中,最后的送餐交付环节是直接影响用户体验的关键环节,送餐交付点的正确与否直接影响着外卖员的送餐体验,如果送餐交付点不正确,则可能导致外卖员无法将餐品准时送达给用户。
POI(Point of Interest,兴趣点)是互联网电子地图中的点类数据,可以包含名称、地址、坐标、类别四个属性。相关技术中,确定送餐交付点的POI坐标主要是通过用户填写的地址,直接调用地图搜索服务接口,返回地图服务给出的坐标。但是,用户填写的地址并不一定代表送餐交付的真实位置,这就造成了大量的定位不准。另外,此种方式对地图服务依赖过高,但地图精度比较差,地图给出的坐标可能位于楼顶或者建筑的中心点,而这些地点往往是外卖员不可到达的地方,如果建筑群足够大,地图返回的位置则可能与真实送餐交付的位置相差较远。
发明内容
本公开的目的是提供一种确定POI坐标的方法、装置、存储介质及电子设备,以解决相关技术中的问题,提高确定的POI坐标的准确性。
为了实现上述目的,第一方面,本公开提供一种确定POI坐标的方法,所述方法包括:
获取具有同一目标送餐地址的多个历史订单;
在每一历史订单的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹;
将每一历史订单的所述送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块;
将所述目标地理哈希块中心点的坐标确定为所述目标送餐地址的POI坐标。
可选地,所述在每一历史订单的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹,包括:
针对每一历史订单的送餐轨迹,通过滑动窗口遍历所述送餐轨迹,所述滑动窗口包括预设个数的轨迹点;
若所述滑动窗口内的轨迹点对应的特征信息满足预设条件,则确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,所述特征信息包括以下至少一者:位置信息、速度信息、转角信息。
可选地,所述若所述滑动窗口内的轨迹点对应的特征信息满足预设条件,则确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,包括:
根据所述滑动窗口内轨迹点的转角信息,确定所述轨迹点的卦限号;
若所述滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、且为停留点的轨迹点数量达到预设数量,则确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,所述停留点为速度小于或等于第一预设速度、且第二预设范围内轨迹点的速度小于或等于所述第一预设速度的轨迹点。
可选地,所述若所述滑动窗口内的轨迹点对应的特征信息满足预设条件,则确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,包括:
确定所述送餐轨迹中第一个速度小于或等于第二预设速度的目标轨迹点,并确定停留点与所述目标轨迹点之间的时间差,得到所述停留点的停留时长,所述停留点为速度小于或等于第一预设速度、且第二预设范围内轨迹点的速度小于或等于所述第一预设速度的轨迹点;
根据所述滑动窗口内轨迹点的转角信息,确定所述轨迹点的卦限号;
若所述滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、为停留点的轨迹点数量达到预设数量、且所述停留时长超过预设时长,则确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹。
可选地,所述轨迹点的位置信息满足预设位置条件,包括:
在预设地图上,所述轨迹点与所述目标送餐地址之间的距离小于或等于第一预设阈值;或者
在所述预设地图上,所述轨迹点与取餐地址之间的距离大于或等于第二预设阈值。
可选地,所述确定映射有最多送餐交付段轨迹的目标地理哈希块,包括:
若映射有最多送餐交付段轨迹的目标地理哈希块为多个,则确定所述多个地理哈希块之间的距离是否小于或等于第一预设距离;
若所述多个地理哈希块之间的距离小于或等于所述第一预设距离,则将所述多个地理哈希块确定为所述目标地理哈希块;相应地,
所述将所述目标地理哈希块中心点的坐标确定为所述目标送餐地址的POI坐标,包括:
确定所述多个地理哈希块的几何中心点,并将所述几何中心点的坐标确定为所述目标送餐地址的POI坐标。
可选地,所述获取具有同一目标送餐地址的多个历史订单,包括:
在具有不同送餐地址的历史订单中,分别确定所述送餐地址在预设地图中对应的地址坐标;
将具有所述地址坐标的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
可选地,所述获取具有同一目标送餐地址的多个历史订单,包括:
在具有不同送餐地址的历史订单中,分别确定所述送餐地址在预设地图中对应的地址坐标;
将所述地址坐标第三预设范围内的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
可选地,所述在每一历史订单的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹,包括:
针对每一历史订单的送餐轨迹,去除与其他轨迹点的距离超过第二预设距离的噪声轨迹点;
在去除所述噪声轨迹点的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹。
第二方面,本公开还提供一种确定POI坐标的装置,所述装置包括:
获取模块,被配置成获取具有同一目标送餐地址的多个历史订单;
第一确定模块,被配置成在每一历史订单的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹;
第二确定模块,被配置成将每一历史订单的所述送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块;
第三确定模块,被配置成将所述目标地理哈希块中心点的坐标确定为所述目标送餐地址的POI坐标。
第三方面,本公开还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面中任一项所述方法的步骤。
第四方面,本公开还提供一种电子设备,包括:
存储器,其上存储有计算机程序;
处理器,用于执行所述存储器中的所述计算机程序,以实现第一方面中任一项所述方法的步骤。
通过上述技术方案,可以将历史订单的送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块,然后将目标地理哈希块中心点的POI坐标确定为目标送餐地址的POI坐标,相较于相关技术中通过地图返回坐标的方式,可以减少对地图服务的依赖,得到距离实际送餐交付点更近的POI坐标,提高确定POI坐标的准确性。
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
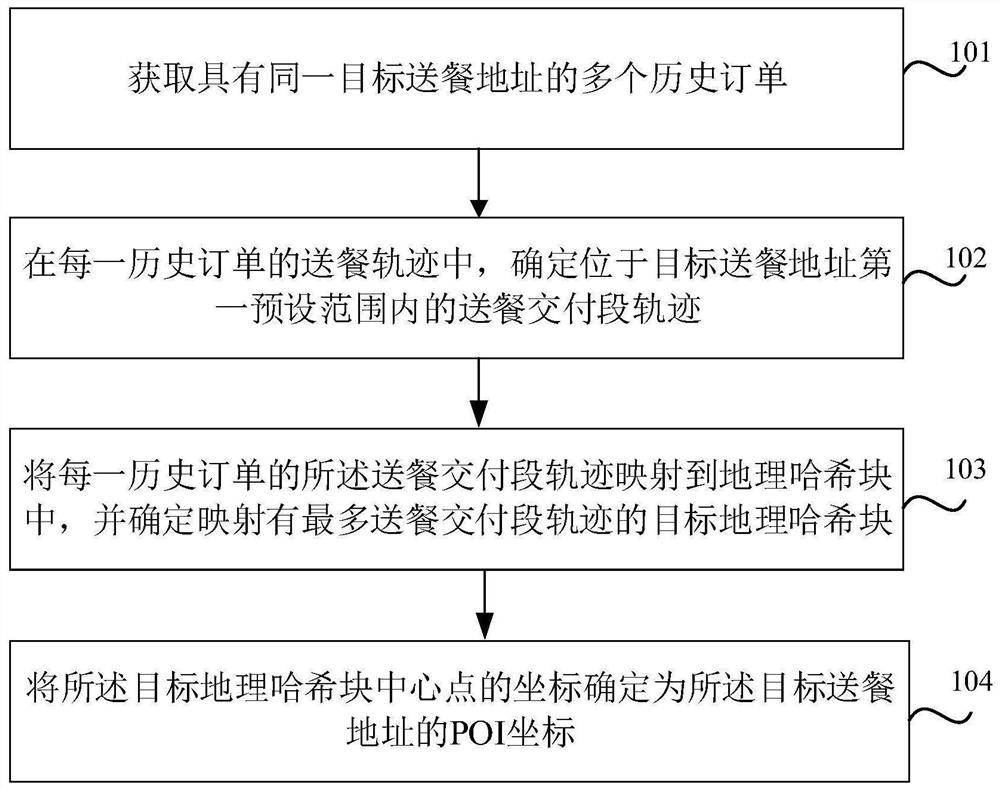
图1是根据本公开一示例性实施例示出的一种确定POI坐标的方法的流程图;
图2是根据本公开一示例性实施例示出的一种确定POI坐标的方法中的卦限划分示意图;
图3是根据本公开一示例性实施例示出的一种确定POI坐标的方法中通过滑动窗口遍历送餐轨迹的示意图;
图4是根据本公开一示例性实施例示出的一种确定POI坐标的方法中对图3中送餐轨迹的划分结果示意图;
图5是根据本公开一示例性实施例示出的一种确定POI坐标的方法中将送餐交付轨迹映射到地理哈希块中的结果示意图;
图6是根据本公开另一示例性实施例示出的一种确定POI坐标的方法的流程图;
图7是根据相关技术确定的目标送餐地址的POI坐标示意图;
图8是根据本公开另一示例性实施例示出的一种确定POI坐标的方法确定的与图7中同一目标送餐地址的POI坐标示意图;
图9是根据本公开一示例性实施例示出的一种确定POI坐标的装置的框图;
图10是根据本公开一示例性实施例示出的一种电子设备的框图。
具体实施方式
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
在外卖运送过程中,最后的送餐交付环节是直接影响用户体验的关键环节,送餐交付点的正确与否直接影响着外卖员的送餐体验,如果送餐交付点不正确,则可能导致外卖员无法将餐品准时送达给用户。
POI(Point of Interest,兴趣点)是互联网电子地图中的点类数据,可以包含名称、地址、坐标、类别四个属性。相关技术中,确定送餐交付点的POI坐标主要是通过用户填写的地址,直接调用地图搜索服务接口,返回地图服务给出的坐标。但是,用户填写的地址并不一定代表送餐交付的真实位置,这就造成了大量的定位不准。另外,此种方式对地图服务依赖过高,但地图精度比较差,地图给出的坐标可能位于楼顶或者建筑的中心点,而这些地点往往是骑手不可到达的地方,如果建筑群足够大,地图返回的位置则可能与真实送餐交付的位置相差较远。
另外,相关技术中还可以对一定空间范围内的外卖员签到点采用密度聚类的方式聚类,将每个聚类的中心作为该范围内的交付点,并且根据附近已有POI的名称对交付点进行命名。但是,此种方式过度依赖骑手的签到数据,容易由于骑手的主观原因而产生偏差,比如提前点击交付或延迟点击交付,这都会导致确定的POI坐标和实际交付位置不一致。
或者,相关技术还可以将同一地址中的骑手签到坐标用孤立森林去噪,然后求去噪后的签到坐标的几何中心作为送餐交付点的POI坐标。但是,此种方式可能由于骑手签到坐标太离散,而无法计算出正确的POI坐标。
有鉴于此,本公开实施例提供一种确定POI坐标的方法、装置、存储介质及电子设备,以解决相关技术中存在的技术问题,提高确定POI坐标的准确性。
首先说明本公开可能的实施场景。在可能的方式中,当用户在客户端填写完送餐地址之后,客户端可以将该送餐地址发送给服务器,服务器可以获取与该送餐地址相同的多个历史订单,然后执行本公开实施例中确定POI坐标的方法的步骤,从而得到该送餐地址的POI坐标。并且,服务器可以将该POI坐标发送给外卖员所持有的客户端,从而外卖员可以根据接收到的POI坐标将餐品准确、及时送达给用户。
图1是根据本公开一示例性实施例示出的一种确定POI坐标的方法的流程图。该方法可以应用于服务器,参照图1,该方法包括:
步骤101,获取具有同一目标送餐地址的多个历史订单。
步骤102,在每一历史订单的送餐轨迹中,确定位于目标送餐地址第一预设范围内的送餐交付段轨迹。
步骤103,将每一历史订单的送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块。
步骤104,将目标地理哈希块中心点的POI坐标确定为目标送餐地址的POI坐标。
应当理解的是,在本公开实施例,当用户在客户端填写完送餐地址之后,客户端可以将该送餐地址发送给服务器,服务器可以获取与该送餐地址相同的多个历史订单,然后执行上述各步骤,从而得到该送餐地址的POI坐标。并且,服务器可以将该POI坐标发送给外卖员所持有的客户端,从而外卖员可以根据接收到的POI坐标将餐品准确、及时送达给用户。
通过上述方式,可以将历史订单的送餐交付段轨迹映射到地理哈希(geohash)块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块,然后将目标地理哈希块中心点的POI坐标确定为目标送餐地址的POI坐标,减少了对地图服务和外卖员签到数据的依赖,可以得到距离实际送餐交付点更近的POI坐标,提高确定POI坐标的准确性。
为了使得本领域技术人员更加理解本公开提供的确定POI坐标的方法,下面对上述各步骤进行详细举例说明。
在步骤101中,获取具有同一目标送餐地址的多个历史订单可以是:针对具有不同送餐地址的历史订单,通过NLP(Natural Language Processing,自然语言处理)解析算法,对历史订单中的送餐地址(即用户填写的地址)进行解析,得到地址中不同级别的主干词,比如可以得到“小区”、“楼号”、“单元号”三个维度的地址主干词。然后依次比对地址主干词,得到具有同一送餐地址的多个历史订单。例如,地址解析的结果可以如表1所示,然后可以参照表1的内容,按照“小区”、“楼号”、“单元号”的顺序依次比对地址主干词,得到具有同一送餐地址的多个历史订单。
表1
应当理解的是,通过NLP解析算法对历史订单中的送餐地址进行解析得到的结果,还可以作为后续确定的POI坐标的名称,以便将后续确定的POI坐标显示在地图上。
或者,在可能的方式中,为了避免将名称相同,但实际地址位置不同的送餐地址确定为同一送餐地址,可以在具有不同送餐地址的历史订单中,分别确定送餐地址在预设地图中对应的地址坐标,然后将具有该地址坐标的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
其中,预设地图可以是相关技术中各种地图服务所提供的地图,本公开实施例对此不作限定。
例如,第一送餐地址和第二送餐地址的名称均为同一餐厅名称,但第一送餐地址为该餐厅在城西的分店,而第二送餐地址为该餐厅在城东的分店,如果仅通过名称进行比对,则可能将距离较远的该两个送餐地址确定为具有同一送餐地址。为了解决该技术问题,可以针对名称比对后的历史订单,再通过预设地图上的地址坐标进行比对。也即是说,在本公开实施例中,同一送餐地址不仅地址名称相同,而且在地图上的地址坐标也可以一致。
进一步,考虑到地图上的地址坐标会小范围抖动,获取具有同一目标送餐地址的多个历史订单还可以是:先在具有不同送餐地址的历史订单中,分别确定所述送餐地址在预设地图中对应的地址坐标,然后将该地址坐标第三预设范围内的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
示例地,第三预设范围可以是根据实际情况设定的,本公开实施例对此也不作限定,在可能的方式中,第三预设范围可以是以某一地址坐标为圆心、半径为100米的圆所包括的范围。
通过上述方式,可以将送餐地址对应的原始坐标第三预设范围内的地址坐标确定为与原始坐标相同的地址坐标,比如可以将原始坐标周围100米半径以内的坐标确定为与原始坐标相同的地址坐标,避免由于地址坐标抖动而导致的结果不准确,提升最终POI坐标的准确性。
在获取到具有同一目标送餐地址的多个历史订单之后,可以在每一历史订单的送餐轨迹中,确定位于目标送餐地址第一预设范围内的送餐交付段轨迹。第一预设范围可以是根据实际情况设定的,本公开实施例对此不作限定。
在可能的方式中,可以针对每一历史订单的送餐轨迹,通过滑动窗口遍历该送餐轨迹,该滑动窗口包括预设个数的轨迹点。若该滑动窗口内的轨迹点对应的特征信息满足预设条件,则可以确定滑动窗口包括的轨迹点所组成的轨迹为送餐交付段轨迹,该特征信息包括以下至少一者:位置信息、速度信息、转角信息。
示例地,预设个数可以是根据实际情况设定的,本公开实施例对此不作限定。比如,预设个数可以设定为10,那么滑动窗口可以包括10个轨迹点,第一预设范围可以是目标送餐地址附近包括10个轨迹点的范围。
示例地,可以针对滑动窗口内的轨迹点进行特征提取并分析。比如,可以提取每个轨迹点的位置信息、转角信息和速度信息,然后分析每个轨迹点的位置信息、转角信息和速度信息是否满足预设条件。
示例地,转角信息可以是轨迹点的GPS坐标中自带的转角信息,用于表征轨迹点相对于正北方向的向右偏角。考虑到外卖员在遇到红灯或者交通事故或者交付、取餐场景才会原地停留,而红灯或交通事故场景不会存在大幅度转角特征,另外,外卖员在送餐交付段轨迹和取餐段轨迹中不可能保持高速行驶状态,因此通过转角信息和速度信息可以确定送餐交付段轨迹与取餐段轨迹。进一步,可以通过位置信息区分送餐交付段轨迹与取餐段轨迹,从而得到送餐交付段轨迹。比如,可以在预设地图上确定商家的地址坐标以及目标送餐地址的地址坐标,然后将距离商家地址更远或者距离目标送餐地址更近的轨迹点确定为送餐交付段轨迹包括的轨迹点。
在可能的方式中,还可以根据滑动窗口内轨迹点的转角信息,确定轨迹点的卦限号。若滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、且为停留点的轨迹点数量达到预设数量,则可以确定滑动窗口包括的轨迹点所组成的轨迹为送餐交付段轨迹。其中,停留点为速度小于或等于第一预设速度、且第二预设范围内轨迹点的速度小于或等于第一预设速度的轨迹点。
在空间立体几何中,由相互垂直的坐标轴X轴、Y轴、Z轴,把空间划分成八个部分,其中每一部分称为一个卦限。在本公开实施例中,参照图2,可以将平面360度划分为8个卦限,从而通过轨迹点的转角信息可以确定该轨迹点对于的卦限号。
在送餐交付轨迹中,通常连续十个轨迹点可以覆盖4个以上的卦限,即十个轨迹点的转角会超过180度,而且包含掉头的动作。因此在本公开实施例中,在滑动窗口包括10个轨迹点的情况下,可以将预设卦限号条件设定为超过4个卦限。
应当理解的是,通过转角信息确定卦限号用于判断送餐交付段轨迹,相较于直接通过转角信息进行判断的方式,可以更准确的得到轨迹点的实际轨迹,进一步提高结果的准确性。比如,在直行的过程中,前后两个轨迹点的转角分别为3度和356度,如果直接计算转角差值,可以得到前后转角差值为353度,前后两个轨迹点的转角较大,无法确定轨迹点是直行、掉头和转弯中哪一种情况。而通过本公开实施例中计算卦限号的方式,可以确定该两个轨迹点经过一卦限和八卦限,未超过4个卦限,从而可以确定轨迹点属于直行轨迹,而不属于送餐交付段轨迹。
示例地,轨迹点的位置信息满足预设位置条件可以包括在预设地图上,轨迹点与目标送餐地址之间的距离小于或等于第一预设阈值;或者在预设地图上,轨迹点与取餐地址之间的距离大于或等于第二预设阈值。其中,第一预设阈值与第二预设阈值可以根据实际情况设定,本公开实施例对此不作限定。比如第二预设阈值可以大于第一预设阈值,等等。
也即是说,在本公开实施例中,预设位置条件可以是距离预设地图上商家地址更远的条件、或者可以是距离预设地图上目标送餐地址更远的条件,本公开实施例对此不作限定。
示例地,预设数量、第一预设速度以及第二预设范围可以是根据实际情况设定的,本公开实施例对此也不作限定。比如,可以将第一预设速度设定为1.5m/s,第二预设范围可以是以某一轨迹点为圆心、半径100米的圆所包括的范围。在此种情况下,停留点可以是外卖员的速度小于或等于1.5m/s、且100米范围内轨迹点的速度也小于或等于1.5m/s的轨迹点。在具体实施时,可以先确定第一个速度小于或等于1.5m/s的目标轨迹点,然后将速度小于或等于1.5m/s、且位于目标轨迹点第二预设范围(比如100米范围内)的轨迹点确定为停留点。
在其他可能的方式中,为了提高结果准确性,还可以确定送餐轨迹中第一个速度小于或等于第二预设速度的目标轨迹点,并确定停留点与目标轨迹点之间的时间差,得到停留点的停留时长。然后,根据滑动窗口内轨迹点的转角信息,确定轨迹点的卦限号。若滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、为停留点的轨迹点数量达到预设数量、且停留时长超过预设时长,则确定滑动窗口包括的轨迹点所组成的轨迹为送餐交付段轨迹。其中,第二预设速度可以根据实际情况进行设定,本公开实施例对此不作限定。比如,第二预设速度可以设定为1.5m/s,等等。
也即是说,在本公开实施例中,为了提高结果准确性,还可以进一步确定停留点的停留时长,比如在上述举例中,在确定第一个速度小于或等于1.5m/s的目标轨迹点后,可以确定任一停留点与目标轨迹点之间的时间差,得到该停留点的停留时长,从而可以根据卦限号、位置信息、停留点的数量以及每一停留点的停留时长确定送餐交付段轨迹。
通过上述方式,可以结合位置信息、转角信息和停留信息将送餐轨迹进行划分,从而更加准确地得到送餐轨迹中的送餐交付段轨迹。
例如,送餐轨迹如图3所示,并且通过包括10个轨迹点的滑动窗口对该送餐轨迹进行遍历,可以将该送餐轨迹进行划分,得到直行轨迹、转弯轨迹、停留交付段轨迹(即送餐交付段轨迹)和停留取餐段轨迹。具体的,请参照图4,可以看出直行轨迹经过两个卦限、轨迹点速度为高速、且无停留点,转弯轨迹经过四个以上卦限、轨迹点速度为高速、且无停留点,停留交付段轨迹经过四个以上卦限、轨迹点速度为低速、且停留点较多,停留取餐段轨迹经过四个以上卦限、轨迹点速度为低速、且停留点较多。然后,可以根据位置信息,将距离预设地图上商家地址更远的轨迹、或者距离预设地图上目标送餐地址更远的轨迹确定为送餐交付段轨迹。
在实际情况中,送餐轨迹可能存在轨迹点缺失,从而导致送餐轨迹中出现距离其他轨迹点较远的噪声点。在本公开实施例中,为了进一步提高确定POI坐标的准确性,可以去除这些噪声点。
具体地,可以针对每一历史订单的送餐轨迹,去除与其他轨迹点的距离超过第二预设距离的噪声轨迹点。然后在去除噪声轨迹点的送餐轨迹中,确定位于目标送餐地址第一预设范围内的送餐交付段轨迹。其中,第二预设距离可以是根据实际情况设定的,本公开实施例对此不作限定。比如可以将第二预设距离设定为30米,那么当轨迹点与其他轨迹点的距离超过30米时,则可以将该轨迹点作为噪声点去除。然后可以针对去除噪声后的送餐轨迹,通过上述任一方法确定送餐交付段轨迹。
在确定送餐交付段轨迹之后,可以将每一历史订单的送餐交付段轨迹映射到地理哈希块中。然后可以确定映射有最多送餐交付段轨迹的目标地理哈希块。
示例地,地理哈希(geohash)块是将地球理解为一个二维平面,将该二维平面递归分解而得到的子块,每个子块在一定经纬度范围内拥有相同的字符串编码。也即是说,每个子块内的所有点(即经纬度坐标点)都共享相同的geohash字符串。在本公开实施例中,可以将每一历史订单的送餐交付段轨迹映射到8位编码的地理哈希块或者9位编码的地理哈希块中,等等,本公开实施例对此不作限定。应当理解的是,地理哈希块的编码位数越多,编码精度越高,从而可以得到更加准确的POI坐标,在本公开实施例具体实施时,可以根据精度要求选择地理哈希块的编码位数。
示例地,将每一历史订单的送餐交付轨迹映射到地理哈希块中,可以是将每一历史订单的送餐交付段轨迹和划分好的地理哈希块显示在同一地图上,然后可以确定每一个地理哈希块经过的轨迹总数,得到映射有最多送餐交付段轨迹的目标地理哈希块。比如,参照图5,图中的矩形块即为地理哈希块,其中,灰度越深则表示经过的送餐交付段轨迹越多,然后可以将灰度最深的地理哈希块确定为目标地理哈希块,即可以将图5中的地理哈希块A确定为目标地理哈希块。
在确定映射有最多送餐交付段轨迹的目标地理哈希块之后,可以将目标地理哈希块中心点的坐标确定为目标送餐地址的POI坐标。示例地,地理哈希块中心点的坐标可以通过地理哈希块的自带属性确定,比如可以通过特定的geohash函数获得,其过程与相关技术中类似,这里不再赘述。
在可能的方式中,若映射有最多送餐交付段轨迹的目标地理哈希块为多个,则可以确定该多个地理哈希块之间的距离是否小于或等于第一预设距离。若该多个地理哈希块之间的距离小于或等于第一预设距离,则可以将多个地理哈希块确定为目标地理哈希块。相应地,将目标地理哈希块中心点的坐标确定为目标送餐地址的POI坐标可以是:确定多个地理哈希块的几何中心点,并将该几何中心点的坐标确定为目标送餐地址的POI坐标。
示例地,第一预设距离可以是根据实际情况设定的,本公开实施例对此不作限定。比如,可以将第一预设距离设定为50米,在此种情况下,若映射有最多送餐交付段轨迹的目标地理哈希块为多个,则可以确定该多个地理哈希块之间的距离是否小于或等于50米。若该多个地理哈希块之间的距离小于或等于50米,则可以将多个地理哈希块确定为目标地理哈希块。然后将该多个地理哈希块的几何中心点的坐标确定为目标送餐地址的POI坐标。在其他可能的情况下,若某一地理哈希块与其他地理哈希块的距离小于或等于50米,则可以舍弃该地理哈希块,然后将剩余地理哈希块的几何中心点的坐标确定为目标送餐地址的POI坐标。
下面通过另一示例性实施例对本公开中确定POI坐标的方法进行说明。
参照图6,该方法包括:
步骤601,在具有不同送餐地址的历史订单中,分别确定送餐地址在预设地图中对应的地址坐标。
步骤602,将地址坐标第三预设范围内的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
步骤603,针对每一历史订单的送餐轨迹,去除与其他轨迹点的距离超过第二预设距离的噪声轨迹点。
步骤604,针对每一历史订单去除噪声后的送餐轨迹,通过滑动窗口遍历该送餐轨迹。其中,滑动窗口包括预设个数的轨迹点。
步骤605,根据滑动窗口内轨迹点的转角信息,确定轨迹点的卦限号。
步骤606,若滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、且为停留点的轨迹点数量达到预设数量,则确定滑动窗口包括的轨迹点所组成的轨迹为送餐交付段轨迹。
步骤607,将每一历史订单的送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块。
步骤608,将目标地理哈希块中心点的坐标确定为目标送餐地址的POI坐标。
上述各步骤的具体实施方式已在上文进行详细举例说明,这里不再赘述。另外应当理解的是,对于上述方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本公开并不受上文所描述的动作顺序的限制。其次,本领域技术人员也应该知悉,上文所描述的实施例属于优选实施例,所涉及的步骤并不一定是本公开所必须的。
通过上述方式,可以将历史订单的送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块,然后将目标地理哈希块中心点的POI坐标确定为目标送餐地址的POI坐标,减少了对地图服务和外卖员签到数据的依赖,可以得到距离实际送餐交付点更近的POI坐标,提高确定POI坐标的准确性。
例如,针对同一目标送餐地址,分别通过相关技术中地图返回坐标的方式、确定签到坐标几何中心的方式、以及本公开实施例中的方式确定POI坐标,可以得到如图7和图8的结果。其中,图7中的O点为目标送餐地址,B点为相关技术中地图返回坐标的方式所确定的POI坐标,图7中的C点为相关技术中确定签到坐标几何中心的方式所确定的POI坐标。图8中的D点为本公开实施例的方式所确定的POI坐标。参照图7和图8可以看出,相关技术中的方式确定POI坐标与目标送餐地址的实际位置偏差较大,而本公开实施例中的方式可以得到更加符合目标送餐地址实际位置的POI坐标,提高了确定POI坐标的准确性。
基于同一发明构思,本公开实施例还提供一种确定POI坐标的装置。该装置可以通过软件、硬件或者两者结合的方式成为电子设备(比如服务器)的部分或者全部。参照图9,确定POI坐标的装置900可以包括:
获取模块901,被配置成获取具有同一目标送餐地址的多个历史订单;
第一确定模块902,被配置成在每一历史订单的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹;
第二确定模块903,被配置成将每一历史订单的所述送餐交付段轨迹映射到地理哈希块中,并确定映射有最多送餐交付段轨迹的目标地理哈希块;
第三确定模块904,被配置成将所述目标地理哈希块中心点的坐标确定为所述目标送餐地址的POI坐标。
可选地,所述第一确定模块902被配置成:
针对每一历史订单的送餐轨迹,通过滑动窗口遍历所述送餐轨迹,所述滑动窗口包括预设个数的轨迹点;
当所述滑动窗口内的轨迹点对应的特征信息满足预设条件时,确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,所述特征信息包括以下至少一者:位置信息、速度信息和转角信息。
可选地,所述第一确定模块902被配置成:
根据所述滑动窗口内轨迹点的转角信息,确定所述轨迹点的卦限号;
当所述滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、且为停留点的轨迹点数量达到预设数量时,确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹,所述停留点为速度小于或等于预设速度、且第二预设范围内轨迹点的速度小于或等于所述预设速度的轨迹点。
可选地,所述第一确定模块902被配置成:
确定所述送餐轨迹中第一个速度小于或等于第二预设速度的目标轨迹点,并确定停留点与所述目标轨迹点之间的时间差,得到所述停留点的停留时长,所述停留点为速度小于或等于第一预设速度、且第二预设范围内轨迹点的速度小于或等于所述第一预设速度的轨迹点;
根据所述滑动窗口内轨迹点的转角信息,确定所述轨迹点的卦限号;
当所述滑动窗口内轨迹点的卦限号满足预设卦限号条件、轨迹点的位置信息满足预设位置条件、为停留点的轨迹点数量达到预设数量、且所述停留时长超过预设时长时,确定所述滑动窗口包括的轨迹点所组成的轨迹为所述送餐交付段轨迹。
可选地,所述轨迹点的位置信息满足预设位置条件,包括:
在预设地图上,所述轨迹点与所述目标送餐地址之间的距离小于或等于第一预设阈值;或者在所述预设地图上,所述轨迹点与取餐地址之间的距离大于或等于第二预设阈值。
可选地,所述第二确定模块903被配置成:
当映射有最多送餐交付段轨迹的目标地理哈希块为多个时,确定所述多个地理哈希块之间的距离是否小于或等于第一预设距离;
当所述多个地理哈希块之间的距离小于或等于所述第一预设距离时,将所述多个地理哈希块确定为所述目标地理哈希块;相应地,
所述第三确定模块904被配置成:
确定所述多个地理哈希块的几何中心点,并将所述几何中心点的坐标确定为所述目标送餐地址的POI坐标。
可选地,所述获取模块901被配置成:
在具有不同送餐地址的历史订单中,分别确定所述送餐地址在预设地图中对应的地址坐标;
将具有所述地址坐标的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
可选地,所述获取模块901被配置成:
在具有不同送餐地址的历史订单中,分别确定所述送餐地址在预设地图中对应的地址坐标;
将所述地址坐标第三预设范围内的多个历史订单,确定为具有同一目标送餐地址的多个历史订单。
可选地,所述第一确定模块902被配置成:
针对每一历史订单的送餐轨迹,去除与其他轨迹点的距离超过第二预设距离的噪声轨迹点;
在去除所述噪声轨迹点的送餐轨迹中,确定位于所述目标送餐地址第一预设范围内的送餐交付段轨迹。
关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不做详细阐述说明。
基于同一发明构思,本公开实施例还提供一种电子设备,包括:
存储器,其上存储有计算机程序;
处理器,用于执行所述存储器中的所述计算机程序,以实现上述任一确定POI坐标的方法的步骤。
在可能的方式中,该电子设备的框图可以如图10所示。参照图10,该电子设备1000可以被提供为一服务器,可以包括处理器1022,其数量可以为一个或多个,以及存储器1032,用于存储可由处理器1022执行的计算机程序。存储器1032中存储的计算机程序可以包括一个或一个以上的每一个对应于一组指令的模块。此外,处理器1022可以被配置为执行该计算机程序,以执行上述的确定POI坐标的方法。
另外,电子设备1000还可以包括电源组件1026和通信组件1050,该电源组件1026可以被配置为执行电子设备1000的电源管理,该通信组件1050可以被配置为实现电子设备1000的通信,例如,有线或无线通信。此外,该电子设备1000还可以包括输入/输出(I/O)接口1058。电子设备1000可以操作基于存储在存储器1032的操作系统,例如WindowsServerTM,Mac OS XTM,UnixTM,LinuxTM等等。
在另一示例性实施例中,还提供了一种包括程序指令的计算机可读存储介质,该程序指令被处理器执行时实现上述的确定POI坐标的方法的步骤。例如,该计算机可读存储介质可以为上述包括程序指令的存储器1032,上述程序指令可由电子设备1000的处理器1022执行以完成上述的确定POI坐标的方法。
在另一示例性实施例中,还提供一种计算机程序产品,该计算机程序产品包含能够由可编程的装置执行的计算机程序,该计算机程序具有当由该可编程的装置执行时用于执行上述的确定POI坐标的方法的代码部分。
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
- 确定POI坐标的方法、装置、存储介质及电子设备
- 确定坐标系转换参数的方法、装置、电子设备和存储介质