一种作业车辆的行走传动装置及其控制方法
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种行走传动装置及其控制方法,特别提供了一种实现精准自由调速的作业车辆的行走传动装置及控制方法。
背景技术
机械液压复合传动装置一般采用液压传动实现起步工况,机械液压传动满足作业工况,机械传动完成转场工况,在整个调速范围内适应各类工况的作业要求。常见的机械液压复合传动装置各模式档位偏少,难以实现精准自由调速的要求。
发明内容
发明目的:针对现有技术中存在的不足,本发明提供了一种作业车辆的行走传动装置及控制方法,可通过离合器和制动器的组合切换实现液压传动、机械液压复合传动和机械传动等模式的切换,在增加系统容错性能的前提下,提高了调节自由度,扩大了调速范围。
技术方案:一种作业车辆的行走传动装置,包括输入轴、机械传动组件、液压传动组件、汇流组件、行走动力输出轴和作业动力输出轴;所述输入轴分别与相互并联的机械传动组件和液压传动组件连接,所述机械传动组件和液压传动组件分别经过汇流组件动力汇流后传递至行走动力输出轴,所述作业动力输出轴与机械传动组件连接,所述输入轴与机械传动组件之间设有第一离合器C
本发明通过离合器和制动器的组合切换实现液压传动、机械液压复合传动和机械传动等模式的切换,在增加系统容错性能的前提下,提高了调节自由度,扩大了调速范围。
进一步,所述机械传动组件包括机械驱动轴、第二离合器C
所述输入轴通过第一离合器C
所述机械前太阳轮通过第二离合器C
所述机械后太阳轮通过第三离合器C
所述机械前后共用行星架通过第四离合器C
所述机械外行星轮和机械内行星轮分别安装在机械前后共用行星架上;
所述机械前后共用齿圈与机械传动输出齿轮副啮合。
进一步,所述汇流组件包括汇流驱动轴、第六离合器C
所述汇流驱动轴与定量马达的马达输出轴固定连接;
所述汇流驱动轴通过第六离合器C
所述汇流驱动轴通过第七离合器C
所述汇流驱动轴通过第八离合器C
所述第四制动器B
所述汇流前太阳轮和汇流后太阳轮分别通过汇流共用行星架与汇流共用齿圈连接,所述汇流共用行星架与行走动力输出轴固定连接;
所述汇流共用齿圈与机械传动输出齿轮副啮合。
一种作业车辆的行走传动装置的控制方法,通过制动器和离合器之间的组合切换实现液压传动、机械液压复合传动和机械传动三个类型的传动模式,三个传动类型如下:
液压传动:第五离合器C
机械液压复合传动:第一离合器C
机械传动:第一离合器C
进一步,所述液压传动包括液压传动Ⅰ档和液压传动Ⅱ档,具体传动模式如下:
液压传动Ⅰ档:第五离合器C
液压传动Ⅱ档:第五离合器C
进一步,所述机械液压复合传动包括正向机械液压复合传动Ⅰ档、正向机械液压复合传动Ⅱ档、正向机械液压复合传动III档、正向机械液压复合传动Ⅳ档、反向机械液压复合传动档,具体传动模式如下:
正向机械液压复合传动Ⅰ档:第一离合器C
所述单向离合器F用于选择性地将机械前后共用行星架单向固定;通过选择性地控制所述单向离合器F或第二制动器B
动力由输入轴分流为两路:
一路经液压传动输入齿轮副、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架汇流后传递至行走动力输出轴;
正向机械液压复合传动Ⅱ档:第一离合器C
动力由输入轴分流为两路:
一路经液压传动输入齿轮副、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架汇流后传递至行走动力输出轴;
正向机械液压复合传动III档:第一离合器C
动力由输入轴分流为两路:
一路经液压传动输入齿轮副、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架汇流后传递至行走动力输出轴;
正向机械液压复合传动Ⅳ档:第一离合器C
动力由输入轴分流为两路:
一路经液压传动输入齿轮副、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架汇流后传递至行走动力输出轴;
反向机械液压复合传动档:第一离合器C
动力由输入轴分流为两路:
一路经液压传动输入齿轮副、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架汇流后传递至行走动力输出轴。
进一步,所述机械传动包括正向机械传动Ⅰ档、正向机械传动Ⅱ档、正向机械传动III档、正向机械传动Ⅳ档、反向机械传动档,具体传动模式如下:
正向机械传动Ⅰ档:第一离合器C
动力由输入轴经第一离合器C
动力经过汇流共用行星架后传递至行走动力输出轴;
正向机械传动Ⅱ档:第一离合器C
动力由输入轴经第一离合器C
动力经过汇流共用行星架后传递至行走动力输出轴;
正向机械传动III档:第一离合器C
动力由输入轴经第一离合器C
动力经过汇流共用行星架后传递至行走动力输出轴;
正向机械传动Ⅳ档:第一离合器C
动力由输入轴依次经第一离合器C
动力经过汇流共用行星架后传递至行走动力输出轴;
反向机械传动档:第一离合器C
动力由输入轴依次经第一离合器C
动力经过汇流共用行星架后传递至行走动力输出轴。
进一步,所述液压传动包括液压传动Ⅰ档和液压传动Ⅱ档的行走动力输出轴转速n
液压传动Ⅰ档
式中,e为液压传动机构排量比,i
当e>0时,为正向档位;当e<0时,为反向倒档;
液压传动Ⅱ档
式中,e为液压传动机构排量比,i
当e>0时,为正向档位;当e<0时,为反向倒档。
进一步,所述机械液压复合传动包括正向机械液压复合传动Ⅰ档、正向机械液压复合传动Ⅱ档、正向机械液压复合传动III档、正向机械液压复合传动Ⅳ档、反向机械液压复合传动档的输出轴转速n
正向机械液压复合传动Ⅰ档
式中,e为液压传动机构排量比,i
正向机械液压复合传动Ⅱ档
式中,i
正向机械液压复合传动III档
式中,i
正向机械液压复合传动Ⅳ档
式中,i
反向机械液压复合传动档
式中,k
进一步,所述机械传动包括正向机械传动Ⅰ档、正向机械传动Ⅱ档、正向机械传动III档、正向机械传动Ⅳ档、反向机械传动档的输出轴转速n
正向机械传动Ⅰ档:
式中,e为液压传动机构排量比,k
正向机械传动Ⅱ档:
式中,i
正向机械传动III档:
式中,i
正向机械传动Ⅳ档:
式中,i
反向机械传动档:
式中,k
有益效果:本发明液压传动采用两个档位,满足多样精准作业和较宽调速范围的要求;液压传动高档位可与机械液压传动档位同步换挡,并具有连接多个机械液压传动档位实现无动力中断换挡的功能;选择性地控制所述单向离合器F或第二制动器B2将前后行星齿轮共用行星架单向或双向固定,实现有或无发动机制动功能,使系统具有较好的容错功能;采用机械传动机构多档位与汇流机构双特性参数相结合,扩展了整个传动装置的调速范围和自由度。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图;
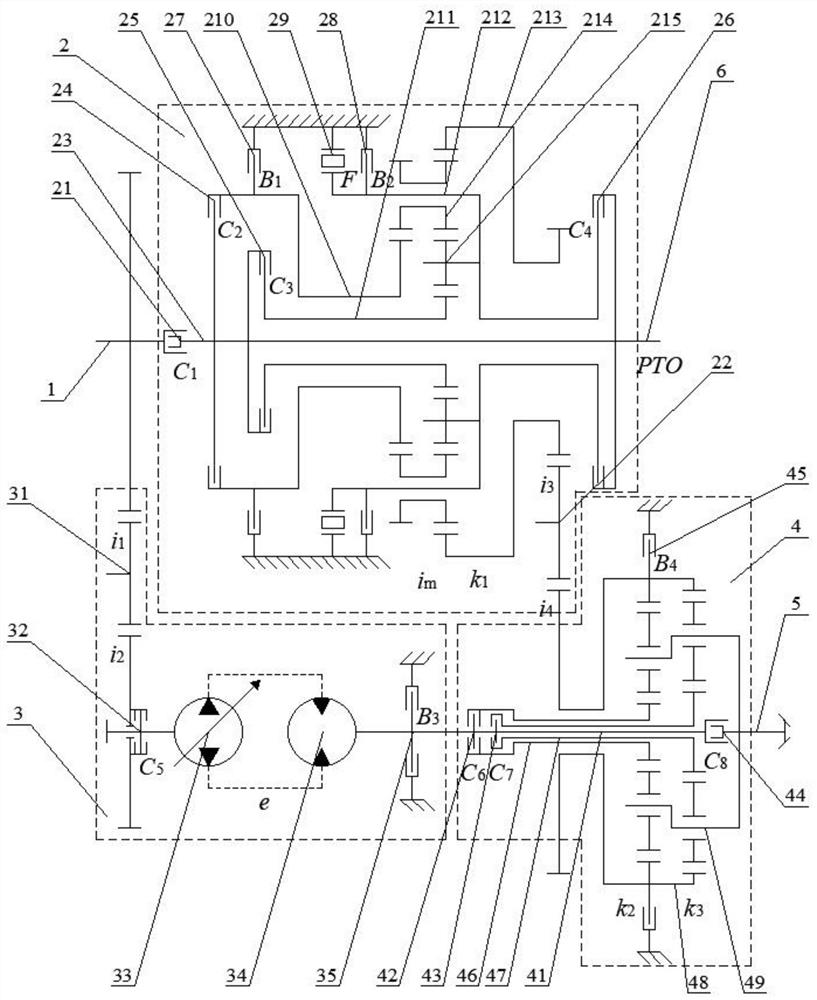
图1为本发明的结构原理图;
图2为本发明液压传动Ⅰ档功率流向示意图;
图3为本发明液压传动Ⅱ档功率流向示意图;
图4为本发明正向机械液压复合传动Ⅰ档功率流向示意图;
图5为本发明正向机械液压复合传动Ⅱ档功率流向示意图;
图6为本发明正向机械液压复合传动III档功率流向示意图;
图7为本发明正向机械液压复合传动Ⅳ档功率流向示意图;
图8为本发明反向机械液压复合传动档功率流向示意图
图9为本发明正向机械传动Ⅰ档功率流向示意图;
图10为本发明正向机械传动Ⅱ档功率流向示意图;
图11为本发明正向机械传动III档功率流向示意图;
图12为本发明正向机械传动Ⅳ档功率流向示意图;
图13为本发明反向机械传动档功率流向示意图;
图14为本发明各档位模式切换及其调速特性曲线图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
如图1所示,一种作业车辆的行走传动装置,包括输入轴1、机械传动组件2、液压传动组件3、汇流组件4、行走动力输出轴5和作业动力输出轴6;所述输入轴1分别与相互并联的机械传动组件2和液压传动组件3连接,所述机械传动组件2和液压传动组件3分别经过汇流组件4动力汇流后传递至行走动力输出轴5,所述作业动力输出轴6与机械传动组件2连接;
所述输入轴1与机械传动组件2之间设有第一离合器C
所述输入轴1与液压传动组件3之间设有液压传动输入齿轮副31和第五离合器C
所述机械传动组件2包括机械驱动轴23、第二离合器C
所述输入轴1通过第一离合器C
所述机械前太阳轮210通过第二离合器C
所述机械后太阳轮211通过第三离合器C
所述机械前后共用行星架212通过第四离合器C
所述机械外行星轮214和机械内行星轮215分别安装在机械前后共用行星架212上;
所述机械前后共用齿圈213与机械传动输出齿轮副22啮合。
所述汇流组件4包括汇流驱动轴41、第六离合器C
所述汇流驱动轴41与定量马达34的马达输出轴固定连接;
所述汇流驱动轴41通过第六离合器C
所述汇流驱动轴41通过第七离合器C
所述汇流驱动轴41通过第八离合器C
所述第四制动器B
所述汇流前太阳轮46和汇流后太阳轮47分别通过汇流共用行星架49与汇流共用齿圈48连接,所述汇流共用行星架49与行走动力输出轴5固定连接;
所述汇流共用齿圈48与机械传动输出齿轮副22啮合。
通过调节液压传动组件3的排量比和选择性控制所述离合器和制动器组件的接合,提供行走动力输出轴5与输入轴1之间的传动方式包括:液压传动、机械液压复合传动和机械传动三个类型。各档位模式切换元件接合状态如表1所示:
表1模式切换元件接合状态
表中:①C代表离合器,B代表制动器;②F代表后档,R代表负档;③H代表液压传动,M代表机械传动,HM代表机械液压复合传动,简称机液复合传动;④▲代表元件处于接合状态,△代表元件处于分离状态。
1.1、液压传动Ⅰ档
如图2所示,第五离合器C
所述液压传动Ⅰ档的行走动力输出轴5转速n
式中,e为液压传动机构排量比,i
当e>0时,为正向档位;当e<0时,为反向倒档。
1.2、液压传动Ⅱ档
如图3所示,第五离合器C
所述液压传动Ⅱ档的行走动力输出轴5转速n
式中,e为液压传动机构排量比,i
当e>0时,为正向档位;当e<0时,为反向倒档。
2.1、正向机械液压复合传动Ⅰ档
如图4所示,第一离合器C
动力由输入轴1分流为两路:
一路经液压传动输入齿轮副31、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架49汇流后传递至行走动力输出轴5。
正向机械液压复合传动Ⅰ档的行走动力输出轴5转速n
式中,e为液压传动机构排量比,i
2.2、正向机械液压复合传动Ⅱ档
如图5所示,第一离合器C
动力由输入轴1分流为两路:
一路经液压传动输入齿轮副31、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架49汇流后传递至行走动力输出轴5。
正向机械液压复合传动Ⅱ档的行走动力输出轴5转速n
式中,i
2.3、正向机械液压复合传动III档
如图6所示,第一离合器C
动力由输入轴1分流为两路:
一路经液压传动输入齿轮副31、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架49汇流后传递至行走动力输出轴5。
正向机械液压复合传动III档的行走动力输出轴5转速n
式中,i
2.4、正向机械液压复合传动Ⅳ档
如图7所示,第一离合器C
动力由输入轴1分流为两路:
一路经液压传动输入齿轮副31、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架49汇流后传递至行走动力输出轴5。
正向机械液压复合传动Ⅳ档的行走动力输出轴5转速n
式中,i
2.5、反向机械液压复合传动档
如图8所示,第一离合器C
动力由输入轴1分流为两路:
一路经液压传动输入齿轮副31、第五离合器C
另一路经第一离合器C
动力经过汇流共用行星架49汇流后传递至行走动力输出轴5。
反向机械液压复合传动档的行走动力输出轴5转速n
式中,k
3.1、正向机械传动Ⅰ档
如图9所示,第一离合器C
动力由输入轴1经第一离合器C
动力经过汇流共用行星架49后传递至行走动力输出轴5。
正向机械传动Ⅰ档的行走动力输出轴5转速n
式中,e为液压传动机构排量比,k
3.2、正向机械传动Ⅱ档
如图10所示,第一离合器C
动力由输入轴1经第一离合器C
动力经过汇流共用行星架49后传递至行走动力输出轴5。
正向机械传动Ⅱ档的行走动力输出轴5转速n
式中,i
3.3、正向机械传动III档
如图11所示,第一离合器C
动力由输入轴1经第一离合器C
动力经过汇流共用行星架49后传递至行走动力输出轴5。
正向机械传动III档的行走动力输出轴5转速n
式中,i
3.4、正向机械传动Ⅳ档
如图12所示,第一离合器C
动力由输入轴1依次经第一离合器C
动力经过汇流共用行星架49后传递至行走动力输出轴5。
正向机械传动Ⅳ档行走动力输出轴5转速n
式中,i
3.5、反向机械传动档
如图13所示,第一离合器C
动力由输入轴1依次经第一离合器C
动力经过汇流共用行星架49后传递至行走动力输出轴5。
反向机械传动档行走动力输出轴5转速n
式中,k
实施例
确定主要参数如下:i
图14给出传动装置输出转速与输入转速之比与排量比之间的关系,输出轴可接减速装置驱动车辆行驶。
O为原点;
A(0,0.24)为机械Ⅰ档特征点,即n
B(0,0.40)为机械Ⅱ档特征点,即n
C(0,0.60)为机械III档特征点,即n
D(0,0.80)为机械Ⅳ档特征点,即n
E(0,-0.33)为机械倒档特征点,即n
对于R
对于R
对于F
对于F
对于F
对于F
对于R(HM)档位,当e∈[-1.00,1.00]时,n
F(-0.50,-0.50)为R
G(0.40,0.40)为F
H(0.67,0.67)为F
I(1.00,1.00)为F
F
F
在F
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
- 一种作业车辆的行走传动装置及其控制方法
- 果园作业车辆的行走控制方法及装置