一种表面清洁系统
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及家用清洁电器领域,尤其涉及一种用于清洁的表面清洁系统。
背景技术
目前市场上的拖地设备通常采用转盘结构,具体为在清洁头的底部设置并排设置的转盘,转盘上设有与待清洁表面接触并呈近似形状的拖布。然而,在完成拖地后需要用户手工清洗拖布,尤其是遇到脏污程度较高的地面,如不及时清洗拖布则可能导致地面难以清理干净,而手工清理时需要用手去触摸脏污的拖布更是一件恼人的事情,况且需要来回手工更换、清洁拖布,还降低了清洁效率。
对此,本申请人的在先申请专利中公开了一种与所述拖地设备配套使用的清洗桶,通过将表面清洁装置固定放置在清洗桶中,利用转盘转动带动擦拭件在清洁件上以转盘的转动轴为旋转中心旋转刮蹭进行清洗,但是这种清洗方式中,擦拭件靠近旋转中心区域由于转动路径较短,导致该区域的清洗效果相对较外侧区域的差,影响整体的清洗效果,仍有进一步提升改进的空间。
发明内容
本发明旨在至少部分解决上述技术问题,提供一种用于拖地设备的清洗组件。
本发明采用的技术方案如下:
一种表面清洁系统,包括具有清洁头的表面清洁装置、用于清洗表面清洁装置的清洗组件,所述清洁头的底部设有呈左右分布的两个可旋转转盘,转盘上设有擦拭件,所述清洁头内设有驱动转盘旋转的驱动组件,所述清洁组件包括清洁槽,清洁槽内设有清洁件、清洗液,所述清洁头放置在清洗槽内,擦拭件与清洗件抵接,所述清洗槽设有水平限位件,驱动组件驱动擦拭件在清洁件上旋转,所述水平限位件与清洁头配合,以使所述清洁头在清洗槽内水平往复摆动。
进一步的,所述清洁头包括壳体,所述水平限位件与所述清洁头的壳体配合,以使所述清洁头在清洗槽内水平往复摆动。
进一步的,所述水平限位件为所述清洗槽的侧壁。
进一步的,所述水平限位件与所述转盘配合,以使所述清洁头在清洗槽内水平往复摆动。
进一步的,所述水平限位件为凸台,所述凸台从所述清洗槽的前侧壁和后侧壁分别向内侧延伸,凸台上设有相对设置的限位面,所述限位面用以限定所述壳体的前后两侧。
进一步的,所述限位面与壳体之间的间距小于所述转盘与清洗槽在前后方向上的间距。
进一步的,所述清洗槽上还设有排水口,所述排水口设于所述凸台与清洗槽后侧壁的过渡部,且在所述表面清洁装置的前进清洁方向上转盘的转动方向为相对向内。
进一步的,所述清洁件上设有用以与擦拭件抵接的刮洗部件,所述两个转盘所对应的刮洗部件关于清洁头的中轴面非对称设置。
进一步的,所述转盘在竖直方向上的投影部分外露于壳体,且所述擦拭件的直径大于所述转盘的直径。
进一步的,所述清洗装置还包括可转动的阀杆,所述阀杆包括驱动端和从动端,清洗槽的底部设有排污口,阀杆的从动端设有用以封闭排水口的阀体,阀杆的驱动端与拖布抵接,转盘反转时拖布带动阀杆转动以打开所述排水口。
本技术方案的有益效果包括:
通过在清洗槽内设置水平限位件,该水平限位件与清洁头配合,以使所述清洁头在清洗槽内水平往复摆动。清洁头上的清洁擦拭件除了以转盘的转动轴为旋转中心在清洁件上旋转刮蹭外,在转盘的水平方向或者径向方向上也产生有一定的滑移,使得周向转动清洁与水平滑移清洁相复合,特别是增加了清洁擦拭件靠近旋转中心区域的刮蹭清洗路径并强化了对该区域的清洗强度,能够提升清洁擦拭件的整体清洗效果。而且,清洁头在清洗槽内摆动过程中带动清洗水流在清洗槽内波动,还可实现对擦拭件上的污物冲刷清洗。
附图说明
作为本申请技术方案一部分的说明书附图用于对本发明进一步的理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
图1是本发明中的地面清洁设备与清洗组件的结构示意图;
图2是本发明中的清洁头在在清洗槽内摆动时的一种状态示意图;
图3是本发明中的清洁头在清洗槽内摆动时的另一种状态示意图;
图4是本发明中的清洁头在清洗槽内摆动时的又一种状态示意图;
图5是实施例一中的清洁头在清洗槽内摆动时的一种状态示意图;
图6是实施例一中的清洁头在清洗槽内摆动时的一种状态示意图;
图7是实施例一中的清洁头在清洗槽内摆动时的又一种状态示意图;
图8是实施例二中的清洁件结构示意图;
图9是图8中A部的局部放大示意图;
图10是实施例三中的阀杆结构示意图;
图11是实施例三中的清洗组件俯视结构示意图;
图12是图11中N-N方向的剖面结构示意图;
图13是图12中B部的局部放大示意图;
图14是实施例三另一种方式的清洗组件俯视结构示意图;
图15是实施例三另一种方式中的阀杆结构示意图;
图16是图14中C部的局部放大示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整的说明。
需要说明的是,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例,以下对至少一个示例性实施例的描述实际上仅仅是说明性的,而不应当作为本申请及其应用的限制。
可以理解的,本实施例中的地面清洁设备可以是自主移动式的清洁机器人,所述自主移动式的清洁机器人,可以在脱离人力的情况下自主移动并进行清洁。所述自主移动式的清洁机器人可以是具有清扫吸尘功能。具体的,所述拖地机器人还具有用以对其进行对接充电的基站。
结合图1至4所示,图中示例性提供的所述表面清洁装置100包括把杆110、枢转组件130和清洁头120,所述把杆110通过所述枢转组件130与清洁头120的后端铰接,所述清洁头120包括壳体121,所述壳体121内设有驱动组件(图中未示出),清洁头120的底部设有转盘122,驱动组件的输出轴从壳体121的底部伸出并与转盘122固定连接。本实施例中的转盘122为两个,在清洁头120的底部呈左右分别布置。所述转盘122的底部设有擦拭件,所述擦拭件固定或者可移除的设置在所述转盘122的底部。所述擦拭件可以是清洁垫、清洗布等具有吸水和绒毛的材质制成,具体形状可以是圆形、方形或者任何其他与转盘形状相适应的形状。
此外,还提供了一种用于所述表面清洁装置100的清洗组件200,所述清洗组件200包括清洗槽210,所述清洗槽210包括水平限位件和用以盛置清洗液的清洗腔,所述清洗槽210内设有清洁件211,所述清洁件211可以是与所述清洗槽一体结构,也可以是与所述清洗槽210分体设置。在表面清洁装置100完成清洁后,将所述表面清洁装置100的清洁头120放置在清洗槽210内使得擦拭件与清洁件211抵接,驱动装置驱动转盘122带动清洁擦拭件在清洁件211上旋转,使得转盘122转动时带动清洁擦拭件与清洁件刮蹭以清理附着于清洁擦拭件上的污物,所述水平限位件与清洁头120配合,以使所述清洁头120在清洗槽内水平往复摆动。可以理解的,所述水平往复摆动可以是左右方向的往复摆动,也可以是前后方向的往复摆动,图2至4中示例性的给出了所述清洁头在大致前后方向往复摆动的状态示意图。
在本实施例中,通过在清洗槽内设置水平限位件,该水平限位件与清洁头配合,以使所述清洁头在清洗槽内水平往复摆动。如此,清洁头上的清洁擦拭件除了以转盘的转动轴为旋转中心在清洁件上旋转刮蹭外,在转盘的水平方向或者径向方向上也产生有一定的滑移,使得周向转动清洁与水平滑移清洁相复合,特别是增加了清洁擦拭件靠近旋转中心区域的刮蹭清洗路径并强化了对该区域的清洗强度,能够提升清洁擦拭件的整体清洗效果。而且,清洁头在清洗槽内摆动过程中带动清洗水流在清洗槽内波动,还可实现对擦拭件上的污物冲刷清洗。而且,清洁头在清洗槽内摆动过程中带动清洗水流在清洗槽内波动,还可实现对擦拭件上的污物冲刷清洗。
具体的,在本实施例中的驱动组件是电机。在一种可选方式中,所述清洁头内设有一个电机,所述电机的输出轴从电机的两端输出并与所述转盘分别传动连接,所述电机控制两个转盘同时实现正转或者反转。在另一种可选的方式中,所述清洁头内设有两个电机,所述电机的输出轴分别与所述转盘连接。如此,可实现所述两个转盘的转向单独分别控制,可以实现当一个转盘转动时,另一个转盘停止;也可以是当一个转盘正转时,另一个转盘反转等等,从而满足用户的实际需要。
实施例一:
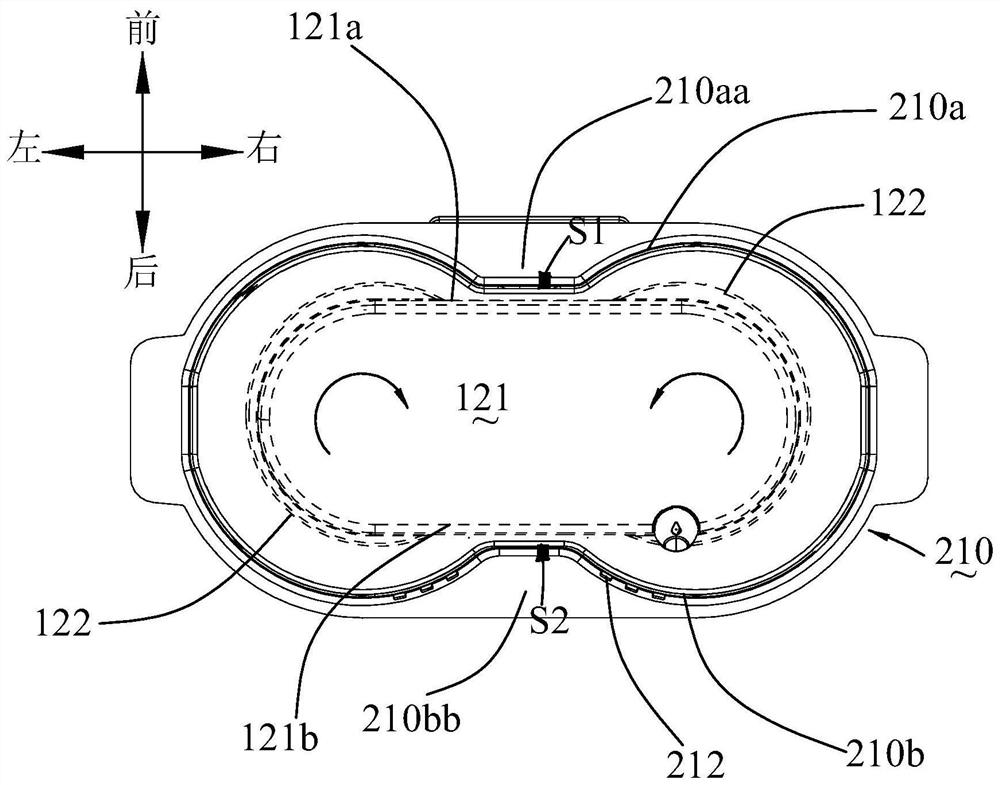
本实施例中,所述水平限位件与所述清洁头120的壳体配合,以使所述清洁头在清洗槽内水平往复摆动。具体的,所述清洁头的壳体121包括前侧壁121a、后侧壁121b,所述清洗槽210包括前侧壁210a、后侧壁210b。
如此,使得水平限位件与壳体的配合位置相对较擦拭件与清洁件的刮蹭面较高,防止清洁头脱离清洗槽,以使所述清洁头在清洗槽内水平往复摆动时更加稳定,
在本实施例的一种实现方式中,所述水平限位件为清洗槽侧壁。由于所述清洗槽侧壁限定了所述清洗槽内的清洗空间,通过将清洗槽的侧壁设置为水平限位件,能够更好的将清洗头限定在清洗槽内往复摆动。
为了进一步提升清洗效果,所述清洗槽的侧壁与清洁头的壳体之间的间隙范围优选为2~15mm。
在本实施例的优选实现方式中,所述水平限位件为凸台,所述凸台包括前凸台210aa和后凸台210bb,所述凸台210aa大致位于所述清洁头前后方向的中轴面上并从所述清洗槽的前侧壁210a和后侧壁210b分别向内侧延伸,前凸台210aa上设有限位面S1,后凸台210bb设有限位面S2,所述限位面S1和限位面S2相对设置,用以限定所述壳体的前后两侧。可以理解的,在本实施例中,仅具有前凸台210aa或者后凸台210bb也可以。
通过将所述水平限位件设置为凸台,通过在清洗槽的前侧壁和后侧壁设置相对凸台,能够更好的对壳体的前后两侧进行限位,减少清洁头摆动时壳体与清洗槽侧壁之间的限位接触面积,进一步保证清洁头摆动时的稳定性。此外,还使得所述清洁擦拭件与清洁件之间前后水平方向上的滑移幅度受所述限位面与壳体之间的间距所控制,防止清洁转盘撞击清洗槽侧壁而使表面清洁装置在清洗槽中放置不稳导致翻倒,并使得清洗槽的中心更加趋近于中部,防止清洗槽受清洁头的摆动冲击而导致倾倒。
进一步的,所述限位面与壳体之间的间距小于所述转盘与清洗槽在前后方向上的间距。具体的,通过将限位面与壳体之间的间距小于所述转盘与清洗槽在前后方向上的间距,限位面与清洁头的摆动中心之间距离更近,使得所述清洁头在清洗槽内水平前后方向上的往复摆动幅度受所述限位面的约束,更容易控制清洁头的往复摆动幅度。结合附图5至8所示,所述清洁头在前后摆动过程中,壳体的前侧壁120a、后侧壁120b分别与所述清洗槽210的前凸台210aa或者后凸台210bb抵接。
优选的,所述清洁件与清洗槽分体可拆卸连接,所述清洁件上设有刮洗部件,所述刮洗部件与清洁件固定或者活动连接,将所述表面清洁装置的清洁头放置于所述清洗腔内时擦拭件与刮洗部件抵接刮蹭。
进一步的,所述清洁件上设有用以与擦拭件抵接的刮洗部件,所述两个转盘所对应的刮洗部件关于清洁头的中轴面非对称设置。
通过将两个转盘所对应的刮洗部件设置为关于清洁头的中轴面非对称设置,使得清洗时左右两个转盘与刮洗部件之间的摩擦力不同,从而增加清洁头在清洗槽内的往复摆动以提升清洗效果。
进一步的,所述清洗槽210上还设有排水口212,所述排水口212设于所述凸台与清洗槽后侧壁210bb的过渡部,且在所述表面清洁装置的前进清洁方向上转盘的转动方向为相对向内。具体的,所述清洗槽后侧壁210b与清洗槽后侧壁210bb的,所述转盘的转动方向参见附图5中的箭头所示。
本实施例中,通过将排水口设于所述凸台与清洗槽后侧壁的过渡部,且在所述表面清洁装置的前进清洁方向上转盘的转动方向为相对向内,使得所述转盘上的擦拭件吸水并同时与清洁件刮蹭,转动清洗时擦拭件上的部分污水因为转动离心力作用通过排水口排出,以进行水位控制。此外,清洗时清洁头往复摆动使得导致清洗桶内壁排水口处出水不均匀,从而增加清洗槽内的水从排水口溢出的阻力,保证清洗时清洗桶内部的水量,提高清洁效率。
进一步的,所述转盘在竖直方向上的投影部分外露于壳体,且所述擦拭件的直径大于所述转盘的直径。
一方面,通过将转盘设置为在竖直方向上的投影部分外露于壳体,能够增加清洁时的擦拭面积;另一方面,由于擦拭件的直径大于转盘的直径,不仅能够增加擦拭面积,还能够使所述清洁头在摆动清洗时超出转盘部分的形成缓冲,防止转盘与清洗槽的侧壁碰撞。
实施例二:
结合附图8、9所示,本实施例与实施例一的区别在于:所述水平限位件与所述转盘配合,以使所述清洁头在清洗槽内水平往复摆动。
优选的,所述水平限位件为限位柱211a,其设置在所述清洁件211上且数量为两个,所述转盘122的底部设有与所述限位柱211a相对应的限位槽(图中未示出),当所述表面清洁装置放置于清洗槽内时,限位柱伸入限位槽以进行配合,以使所述清洁头在清洗槽内水平往复摆动。
实施例三:
本实施例与实施例一、二的区别在于:本实施例中的清洗组件还包括可转动的阀杆230,所述阀杆230至少部分设于清洗槽内,所述阀杆230包括驱动端231和从动端232,清洗腔的底部设有排污口213,阀杆230的从动端232设有用以封闭排污口213的阀体,阀杆230的驱动端231与拖布抵接,转盘反转时拖布带动阀杆230转动以打开所述排污口213。具体的,在本实施例中,所述清洁头左侧的转盘对应所述阀杆230设置,所述清洁头左侧的转盘反转时拖布带动阀杆230转动以打开所述排污口213,所述清洁头左侧的转盘正转时,阀杆230的驱动端231受到拖布水平方向的力使其向封闭排污口213的方向移动在封闭排污口213后阀杆230相对拖布打滑使得阀体进一步压紧封闭排污口213。
具体的,在本实施例中,与拖布抵接的阀杆的驱动端231也构成了刮洗部件的至少一部分。
本实施例中,清洗时转盘正转,阀杆从动端的阀体封闭排污口,转盘转动时拖布与清洗内的清洗用水接触并与清洗部件旋转刮蹭从而将附着于拖布上的污物清除;清洗完成后转盘反转,拖布带动阀杆转动从而自动打开排污口,将污水排出清洗槽。在整个过程中,直接通过转盘正反转驱动与拖布抵接的阀杆控制排污口的开闭,用户无需手动参与排水,实现了清洗的自动化,提升用户体验。
优选的,所述阀杆230整体位于清洗槽内,所述阀杆230与清洗槽210转动连接。具体的,所述清洗槽的内底壁上设有凸起的阀座214,所述阀杆20与阀座214枢转连接。
在本实施例的一种可选方式中,所述阀杆230的枢转中心轴与水平面大致垂直以使阀体水平方向移动打开或者关闭排污口。
优选的,在本实施例中,所述阀杆230的枢转中心轴与水平面大致平行以使阀体上下方向移动打开或者关闭排污口213。
本实施例中,所述清洁件210上还设有镂空的通孔,所述阀杆230的驱动端231穿过所述通孔并高于刮洗部件。
结合图2至6,在本实施例的一种方式中,所述清洗组件具有经过所述枢转中心轴o-o并与水平面垂直的第一平面,所述阀体230的驱动端231和从动端232位于所述第一平面的异侧。具体的,所述阀杆230的驱动端231的动力臂与从动端232的阻力臂之间的夹角为钝角。
优选的,在本实施例中,所述清洗具有经过所述枢转中心轴o-o并与水平面垂直的第一平面,所述阀杆230的驱动端231和从动端232位于所述第一平面的同侧。
当拖把放置在清洗组件上时,所述阀杆的驱动端与拖布抵接受到向下的力,使得所述阀体能够更好封闭排污口。此外,还使得阀杆的整体重心也位于靠近排水口一侧,在未放置表面清洁装置时其自身能够受重力作用而复位封闭排污口,结构简单可靠。
当底面清洁设备未放置在清洗组件上时,需要保持阀体封闭所述排污口,使得用户在使用之前可以径自向清洗腔中添加清洗用水,为此,还在所述清洗桶上设置阀杆的复位构件以在清洗完成时能够自动复位。
在本实施例的一种方式中,所述阀座212上设有扭簧216,所述扭簧216使阀杆230在回复至封闭排污口213。
在本实施中,所述阀杆230的枢转中心轴o-o经过所述转盘的转动中心轴。如此,使得所述阀杆转动时的整个力臂和阀杆于拖布抵接位置到转动中心的半径垂直,从而减少驱动阀杆转动时的其他方向的分力损失,提高排水口打开的可靠性。
可以理解的,在所述表面清洁装置是自移动机器人的情况下,所述的清洗组件可以是独立于所述充电的基站,也可以是设置于所述基站上,以使清洗组件完成地面清洁工作后自动停泊在基站的对应位置,在充电的同时进行自动清洗。
在本发明中,术语“第一”、“第二”仅用于描述的目的,而不能理解为指示或暗示相对重要性;术语“多个”则指两个或两个以上,除非另有明确的限定。术语“安装”、“相连”、“连接”、“固定”等术语均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接;“相连”可以是直接相连,也可以通过中间媒介间接相连。术语“上”、“下”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或单元必须具有特定的方向、以特定的方位构造和操作。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
- 表面清洁设备、表面清洁设备用基站以及表面清洁系统
- 一种湿式表面清洁系统的集成站和表面清洁系统