扫地机器人自动返回加水方法、扫地机器人和基座
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及智能家居技术,特别涉及一种扫地机器人自动返回加水方法、扫地机器人和基座。
背景技术
随着人们生活水平的日益提高,解放双手以使人们更好的享受生活成为人们一种普遍需求,扫地机器人的出现,因其可以在无人参与的情况下自动完成扫地、拖地等功能,成为一种非常受欢迎的智能家居产品。
现相关技术中,扫地机器人通过自带拖地水箱喷水使拖地模块在拖地过程中持续保持湿润,以便拖地模块对地板进行有效清洁;但受扫地机器人结构限制,现扫地机器人自带拖地水箱一般容量较小,其可完成的拖地面积也相对较小,需用户每次使用前进行人工加水;当用户需对较大面积房间进行拖地时,扫地机器人自带拖地水箱的水量不足,需用户在拖地过程中进行人工加水,当在无人看守情况下,易造成因缺水而无法对后续清扫任务中的地板进行有效清洁,从而影响用户体验。
发明内容
针对上述存在的问题,本发明提供一种扫地机器人自动返回加水方法、扫地机器人和基座,通过扫地机器人自动返回基座加水,始终使扫地机器人自带拖地水箱水量保持充足,克服现有技术中因扫地机器人自带拖地水箱容量较小,需用户每次使用前或使用过程中进行人工加水的问题,这样既影响用户体验又不能真正实现扫地机器人的智能化。
第一方面,本发明提供一种扫地机器人自动返回加水方法,包括:
检测到扫地机器人需返回基座加水的条件;
控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置;
基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作;
检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作。
结合第一方面,在第一种的可能方式下,所述检测到扫地机器人需返回基座加水的条件包括:检测到扫地机器人自带拖地水箱当前水量触发预设低水位档或检测到扫地机器人需返回基座充电位置充电的指令;所述充电位置和加水位置为同一位置。
结合第一方面,在第二种可能的实现方式下,基座与扫地机器人通过无线连接进行通讯,其中所述无线连接包括选自以下的至少一种:WiFi,移动通信网络,蓝牙,红外遥控,和无线射频。
第二方面,本发明提供一种扫地机器人,包括:
检测模块,用于检测到扫地机器人需返回基座加水的条件;
控制模块,用于控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置;
基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作;
检测模块,还用于检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作。
结合第二方面,在第一种的可能方式下,所述检测模块检测到扫地机器人需返回基座加水的条件包括:检测模块检测到扫地机器人自带拖地水箱当前水量触发预设低水位档或检测模块检测到扫地机器人需返回基座充电位置充电的指令;所述充电位置和加水位置为同一位置。
结合第二方面,在第二种可能的实现方式下,无线通讯模块,用于基座与扫地机器人通过无线连接进行通讯,其中所述无线通讯模块包括选自以下的至少一种:WiFi模块,移动通信网络模块,蓝牙模块,红外遥控模块,和无线射频模块。
第三方面,本发明提供一种基座,包括:
底座、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置;所述底座上设置有储水箱和用于对扫地机器人自带拖地水箱加水的加水部件,所述加水部件包括阀门和用于与扫地机器人自带拖地水箱加水口对接的加水头,所述储水箱、阀门和加水头通过管件相连通。
结合第三方面,在第一种可能的实现方式下,所述加水部件具有第一位置和第二位置,加水部件设置为能够在第一位置和第二位置之间切换;在第一位置时,加水部件上设置的加水头远离加水位置,即:加水头处于远离与扫地机器人自带拖地水箱加水口对接的位置;在第二位置时,加水部件上设置的加水头处于加水位置,即:加水头处于与扫地机器人自带拖地水箱加水口对接的位置;底座上设置有用于驱动加水部件在第一位置和第二位置之间切换的驱动机构。
结合第三方面至第一种可能的实现方式中的任一种实现方式,在第二种可能的实现方式下,所述储水箱、阀门和加水头相连通的管件中连通有用于增大加水流量的水泵。
结合第三方面至第一种可能的实现方式中的任一种实现方式,在第三种可能的实现方式下,所述储水箱替换为自来水入口连接件。
结合第三方面至第三种可能的实现方式中的任一种实现方式,在第四种可能的实现方式下,底座上设置有与扫地机器人充电端子相匹配的充电电极。
结合第三方面至第三种可能的实现方式中的任一种实现方式,在第五种可能的实现方式下,底座上设置有可与扫地机器人进行无线连接通讯的无线通讯模块,其中所述无线通讯模块包括选自以下的至少一种:WiFi模块,移动通信网络模块,蓝牙模块,红外遥控模块,和无线射频模块。
本发明与现有技术相比具有以下优点和积极效果:
本发明提供的扫地机器人自动返回加水方法、扫地机器人和基座,通过扫地机器人自动返回基座加水,始终使扫地机器人自带拖地水箱水量保持充足,克服现有技术中因扫地机器人自带拖地水箱容量较小,需用户每次使用前或使用过程中进行人工加水的问题,提高用户体验。
附图说明
下面结合附图对本发明作进一步说明。
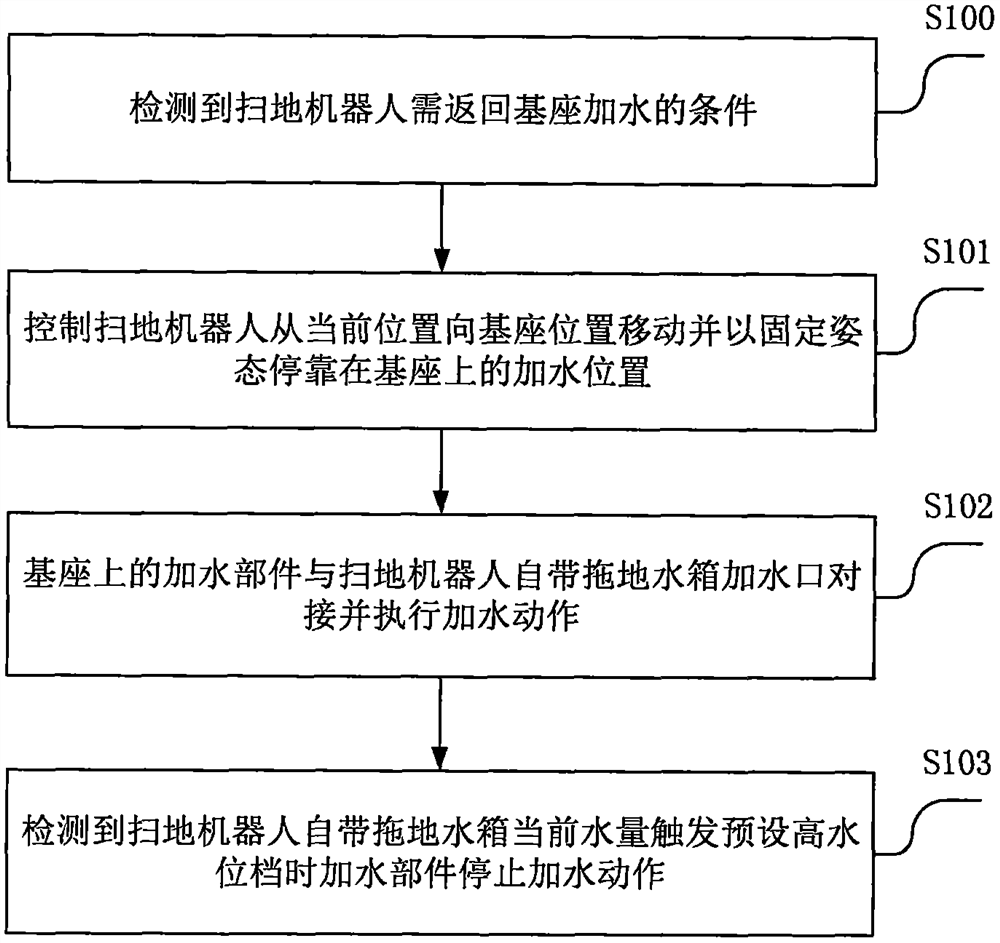
图1为本发明的扫地机器人自动返回加水方法实施例的流程示意图;
图2为本发明的基座的结构示意图;
图3为本发明的基座的剖视结构示意图;
图4为本发明的另一种基座的剖视结构示意图;
图5为本发明的另一种基座的剖视结构示意图;
图6为本发明的另一种基座的剖视结构示意图;
图7为本发明的另一种基座的结构示意图;
图8为本发明的另一种基座的剖视结构示意图;
图9为本发明的另一种基座的剖视结构示意图;
图10为本发明的另一种基座的结构示意图;
图11为本发明的另一种基座的剖视结构示意图;
图12为本发明的另一种基座的剖视结构示意图;
图13为本发明的的另一种基座的结构示意图;
图14为本发明的另一种基座的剖视结构示意图;
图15为本发明的扫地机器人自动返回加水场景示意图;
图16为本发明的另一种扫地机器人自动返回加水场景示意图;
图17为本发明的另一种扫地机器人自动返回加水场景示意图;
图18为本发明的扫地机器人的结构示意图。
具体实施方式
下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。相反,本发明的实施例包括落入所附加权利要求书的精神和内涵范围内的所有变化、修改和等同物。
本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本发明的实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。
下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
本发明实施例中,通过扫地机器人自动返回基座加水,始终使扫地机器人自带拖地水箱水量保持充足,提高用户体验。
图1为本发明的扫地机器人自动返回加水方法实施例的流程示意图,本实施例的方法如下:
S100:检测到扫地机器人需返回基座加水的条件。
具体地,所述检测到扫地机器人需返回基座加水的条件包括:检测到扫地机器人自带拖地水箱当前水量触发预设低水位档。
具体地,图15为本发明的扫地机器人自动返回加水场景示意图,图16为本发明的另一种扫地机器人自动返回加水场景示意图,17为本发明的另一种扫地机器人自动返回加水场景示意图,如图15、图16、图17所示,扫地机器人自带拖地水箱10上设置有水位传感器(如:霍尔开关,图中未示出),所述水位传感器可实时检测拖地水箱10的当前水量信息,当所述水位传感器检测到拖地水箱10的当前水量触发预设低水位档时执行S101步骤。
在另一个实施例中,具体地,所述检测到扫地机器人需返回基座加水的条件包括:检测到扫地机器人需返回基座充电位置充电的指令,所述充电位置和加水位置为同一位置。
具体地,图2为本发明的基座的结构示意图,图7为本发明的另一种基座的结构示意图,图10为本发明的另一种基座的结构示意图,图13为本发明的的另一种基座的结构示意图,如图2、图7、图10、图13所示,底座20上设置有与扫地机器人充电端子相匹配的充电电极22,如图15、图16、图17所示,所述充电位置和加水位置A为同一位置;所述扫地机器人需返回基座充电位置充电的指令包括:结束清扫任务返回充电或电量不足返回充电。
S101:控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置。
具体地,如图2、图7、图10、图13所示,基座包括:底座20,可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置21,如图15、图16、图17所示,当所述水位传感器(图中未示出)检测到拖地水箱10的当前水量触发预设低水位档时或检测到扫地机器人需返回基座充电位置充电的指令时,控制扫地机器人从当前位置向步骤150或步骤160或步骤170的基座位置移动并在对正信号发射装置21引导下以固定姿态停靠在步骤151或步骤161或步骤171所示的基座上加水位置A(即:充电位置),所述扫地机器人当前位置为其工作范围内任意一位置。
S102:基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作。
具体地,基座包括:底座、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置;所述底座上设置有储水箱和用于对扫地机器人自带拖地水箱加水的加水部件,所述加水部件包括阀门和用于与扫地机器人自带拖地水箱加水口对接的加水头,所述储水箱、阀门和加水头通过管件相连通。
具体地,图3为本发明的基座的剖视结构示意图,如图2、图3、图15所示,基座包括:底座20、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置21,所述底座20上设置有储水箱24和用于对扫地机器人自带拖地水箱10加水的加水部件32,所述加水部件32包括阀门31和用于与扫地机器人自带拖地水箱10加水口11对接的加水头23,所述储水箱24、阀门31和加水头23通过管件30相连通;如图15所示,控制扫地机器人以固定姿态停靠在步骤151所示的基座上加水位置A时,同时加水头23与拖地水箱10的加水口11完成对接,此时阀门31打开,储水箱24内的水通过管件30、加水头23向拖地水箱10内进行加注;所述阀门31为电控阀门(如:电磁阀门或电动阀门或其他形式的电控制阀门,本发明不做限制),所述加水口11可设置为弹性开启或关闭,对接时加水口11被加水头23顶开,未对接时加水口11在弹性元件作用下自动关闭,防止拖地水箱10内的水流出;加水口11也可用其他方式开启或关闭以便于加水头23与加水口11快速对接,本发明对此不做限制。
在另一个实施例中,具体地,所述加水部件具有第一位置和第二位置,加水部件设置为能够在第一位置和第二位置之间切换;在第一位置时,加水部件上设置的加水头远离加水位置,即:加水头处于远离与扫地机器人自带拖地水箱加水口对接的位置;在第二位置时,加水部件上设置的加水头处于加水位置,即:加水头处于与扫地机器人自带拖地水箱加水口对接的位置;底座上设置有用于驱动加水部件在第一位置和第二位置之间切换的驱动机构。
具体地,图5为本发明的另一种基座的剖视结构示意图,图8为本发明的另一种基座的剖视结构示意图,如图2、图5、图7、图8、图16、图17所示,基座包括:底座20、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置21,所述底座20上设置有储水箱24和用于对扫地机器人自带拖地水箱10加水的加水部件32,所述加水部件32包括阀门31和用于与扫地机器人自带拖地水箱10加水口11对接的加水头23,所述储水箱24、阀门31和加水头23通过管件30相连通,所述加水部件32具有第一位置和第二位置,加水部件32设置为能够在第一位置和第二位置之间切换;在第一位置时,加水部件32上设置的加水头23远离加水位置A,即:加水头23处于远离与扫地机器人自带拖地水箱10加水口11对接的位置;在第二位置时,加水部件32上设置的加水头23处于加水位置A,即:加水头23处于与扫地机器人自带拖地水箱10加水口11对接的位置;底座20上设置有用于驱动加水部件32在第一位置和第二位置之间切换的驱动机构50;如图16、图17所示,控制扫地机器人以固定姿态停靠在步骤161或步骤171所示的基座上加水位置A时,同时加水部件32在驱动机构50驱动下由第一位置切换到第二位置,即加水位置A,加水部件32上设置的加水头23与拖地水箱10的加水口11完成对接,此时阀门31打开,储水箱24内的水通过管件30、加水头23向拖地水箱10内进行加注;本实施例也可在控制扫地机器人以固定姿态停靠在步骤161或步骤171所示的基座上加水位置A之前或之后,再由驱动机构50驱动加水部件32由第一位置切换到第二位置,即加水位置A,本发明对此不做限制。
在另一个实施例中,具体地,所述储水箱、阀门和加水头相连通的管件中连通有用于增大加水流量的水泵。
具体地,图4为本发明的另一种基座的剖视结构示意图,图6为本发明的另一种基座的剖视结构示意图,图9为本发明的另一种基座的剖视结构示意图,如图2、图4、图6、图7、图9所示,基座包括:底座20、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置21,所述底座20上设置有储水箱24和用于对扫地机器人自带拖地水箱10加水的加水部件32,所述加水部件32包括阀门31和用于与扫地机器人自带拖地水箱10加水口11对接的加水头23,所述储水箱24、阀门31和加水头23通过管件30相连通,所述储水箱24、阀门31和加水头23相连通的管件30中连通有水泵40,加水时启动水泵40增大加水流量;需要说明的是,如图15、图16、图17所示,本实施例的工作步骤在上述实施例中已详细说明,在此不再赘述。
如图2、图3、图4、图5、图6、图7、图8、图9所示,所述底座20上设置有储水箱盖板25。
在另一个实施例中,具体地,所述储水箱替换为自来水入口连接件。
具体地,图11为本发明的另一种基座的剖视结构示意图,图12为本发明的另一种基座的剖视结构示意图,图14为本发明的另一种基座的剖视结构示意图,如图10、图11、图12、图13、图14所示,基座包括:底座20、可引导扫地机器人移动并以固定姿态停靠在基座上加水位置的对正信号发射装置21,所述底座20上设置有自来水入口连接件100和用于对扫地机器人自带拖地水箱10加水的加水部件32,所述加水部件32包括阀门31和用于与扫地机器人自带拖地水箱10加水口11对接的加水头23,所述自来水入口连接件100、阀门31和加水头23通过管件30相连通;需要说明的是,如图15、图16、图17所示,本实施例的工作步骤在上述实施例中已详细说明,在此不再赘述。
S103:检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作。
具体地,在上述各实施例中,所述扫地机器人自带拖地水箱10上设置的水位传感器实时检测拖地水箱10的当前加水量信息,当所述水位传感器检测到拖地水箱10的当前水量触发预设高水位档时,阀门31关闭并停止加水动作;如图5、图6、图8、图9、图12、图14、图16、图17所示,加水部件32在驱动机构50驱动下由第二位置(即:加水位置A)切换到第一位置。
在另一个实施例中,具体地,所述控制扫地机器人返回并以固定姿态停靠在基座充电位置充电时,同时基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作,检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作;所述充电位置和加水位置为同一位置。
在上述实施例中,具体地,基座与扫地机器人通过无线连接进行通讯,其中所述无线连接包括选自以下的至少一种:WiFi,移动通信网络,蓝牙,红外遥控,和无线射频。
具体地,底座20上设置有可与扫地机器人进行无线连接通讯的无线通讯模块,其中所述无线通讯模块包括选自以下的至少一种:WiFi模块,移动通信网络模块,蓝牙模块,红外遥控模块,和无线射频模块,基座通过无线通讯模块接收扫地机器人发送的指令信息及向扫地机器人反馈状态信息。
在上述实施例中,扫地机器人和基座之间的信息交互可通过服务器进行转发。
在另一个实施例中,具体地,所述扫地机器人自带拖地水箱上设置有水位传感器(如:霍尔开关),其用于检测拖地水箱预设低水位档,所述基座上也设置有水位传感器(如:霍尔开关),其用于检测拖地水箱预设高水位档,当基座上设置的水位传感器检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作。
在上述实施例中,具体地,如在一个应用场景中:需要说明的是,本应用场景涉及各实施例中的基座的结构及工作步骤在上述实施例中已详细说明,在此不再赘述;在清扫任务执行过程中,扫地机器人上的水位传感器实时检测自带拖地水箱的当前水量信息,当水位传感器检测到自带拖地水箱的当前水量触发预设低水位档时,控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置,扫地机器人通过无线通讯模块向基座发送加水的指令信息,基座接收到加水指令信息后按上述各实施例执行加水动作,当扫地机器人上的水位传感器检测到自带拖地水箱的当前水量触发预设高水位档时,扫地机器人通过无线通讯模块向基座发送停止加水的指令信息,基座接收到停止加水指令信息后按上述各实施例执行停止加水动作,扫地机器人继续执行清扫任务。
在上述实施例中,具体地,如在另一个应用场景中:需要说明的是,本应用场景涉及各实施例中的基座的结构及工作步骤在上述实施例中已详细说明,在此不再赘述;在清扫任务执行过程中,扫地机器人上的水位传感器实时检测自带拖地水箱的当前水量信息,当水位传感器检测到自带拖地水箱的当前水量触发预设低水位档时,控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置(即:充电位置),基座检测到开始充电指令后按上述各实施例执行加水动作或扫地机器人检测到开始充电指令后通过无线通讯模块向基座发送加水的指令信息,基座接收到加水指令信息后按上述各实施例执行加水动作,当扫地机器人上的水位传感器检测到自带拖地水箱的当前水量触发预设高水位档时,扫地机器人通过无线通讯模块向基座发送停止加水的指令信息,基座接收到停止加水指令信息后按上述各实施例执行停止加水动作,扫地机器人继续执行清扫任务。
在上述实施例中,具体地,如在另一个应用场景中:需要说明的是,本应用场景涉及各实施例中的基座的结构及工作步骤在上述实施例中已详细说明,在此不再赘述;当结束清扫任务或电量不足时,控制扫地机器人返回并以固定姿态停靠在基座充电位置(即:加水位置)充电时,基座检测到开始充电指令后按上述各实施例执行加水动作或扫地机器人检测到开始充电指令后通过无线通讯模块向基座发送加水的指令信息,基座接收到加水指令信息后按上述各实施例执行加水动作,当扫地机器人上的水位传感器检测到自带拖地水箱的当前水量触发预设高水位档时,扫地机器人通过无线通讯模块向基座发送停止加水的指令信息,基座接收到停止加水指令信息后按上述各实施例执行停止加水动作,扫地机器人继续执行充电。
在上述实施例中,具体地,如在另一个应用场景中:需要说明的是,本应用场景涉及各实施例中的基座的结构及工作步骤在上述实施例中已详细说明,在此不再赘述;本应用场景按上述各应用场景执行加水动作,当基座上的水位传感器检测到扫地机器人自带拖地水箱的当前水量触发预设高水位档时,基座按上述各实施例执行停止加水动作,扫地机器人继续执行清扫任务或充电。
上述实施例描述的为,检测到扫地机器人需返回基座加水的条件;控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置;基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作;检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作;所述检测到扫地机器人需返回基座加水的条件包括:检测到扫地机器人自带拖地水箱当前水量触发预设低水位档或检测到扫地机器人需返回基座充电位置充电的指令。通过扫地机器人自动返回基座加水,始终使扫地机器人自带拖地水箱水量保持充足,克服现有技术中因扫地机器人自带拖地水箱容量较小,需用户每次使用前或使用过程中进行人工加水的问题,提高用户体验。
相应地,本发明实施例提供了一种与上述实施例中的扫地机器人自动返回加水方法对应的扫地机器人。图18为本发明实施例提供的扫地机器人结构示意图。如图18所示,本发明实施例提供的扫地机器人包括:
检测模块1801,用于检测到扫地机器人需返回基座加水的条件;
控制模块1802,用于控制扫地机器人从当前位置向基座位置移动并以固定姿态停靠在基座上的加水位置;
基座上的加水部件与扫地机器人自带拖地水箱加水口对接并执行加水动作;
检测模块1801,还用于检测到扫地机器人自带拖地水箱当前水量触发预设高水位档时加水部件停止加水动作。
在上述实施例中,所述检测模块1801检测到扫地机器人需返回基座加水的条件包括:检测模块1801检测到扫地机器人自带拖地水箱当前水量触发预设低水位档或检测模块1801检测到扫地机器人需返回基座充电位置充电的指令;所述充电位置和加水位置为同一位置。
在上述实施例中,无线通讯模块1803,用于基座与扫地机器人通过无线连接进行通讯,其中所述无线通讯模块1803包括选自以下的至少一种:WiFi模块,移动通信网络模块,蓝牙模块,红外遥控模块,和无线射频模块。
需要说明的是,本发明实施例提供的扫地机器人植入了上述实施例中提供的扫地机器人自动返回加水方法,因此,本发明实施例提供的扫地机器人中各个模块的具体工作过程在此不再赘述。
上述实施例通过扫地机器人自动返回基座加水,始终使扫地机器人自带拖地水箱水量保持充足,克服现有技术中因扫地机器人自带拖地水箱容量较小,需用户每次使用前或使用过程中进行人工加水的问题,提高用户体验。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 扫地机器人自动返回加水方法、扫地机器人和基座
- 扫地机器人自动返回充电方法、扫地机器人和充电座