铰接机构和包括所述机构的铰接指向系统
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及铰接机构和指向系统领域,并且更具体地涉及天线指向系统。
背景技术
在航空航天工业中,通常在通信卫星中安装反射器天线。也通常使用指向这种反射器天线的机构。
JP H04266203A涉及“用于天线系统的底座”。用于支撑接收卫星广播的天线装置的支撑基座包括第一基座和第二基座。水平方向位置检测装置设置在第一基座上,并且第一基座由从提供给第二基座的滚珠轴承延伸的轴支撑。第一和第二凸轮装置以及控制装置用于响应于来自位置检测装置的检测输出来驱动第一和/或第二电动机,以保持第一基座水平。在该系统中,中心枢转点是球形关节,并且致动器位于主负载路径中。
WO 2011/104038 A1涉及“齿轮机构”。在第一实施例中,齿轮机构采取多接头的形式,其中,多个连接元件针对另一连接元件以平移的方式是可调节的和相对于它们的角度是可调节的。在第二实施例中,提供了简化形式的齿轮机构,多个连接元件仅相对于它们的角位置是可调节的的形式,也就是说,一种用于在两个相对偏心安装的连接元件之间传递运动的齿轮机构,其具有设置在连接元件之间的轴承元件以及具有固定尺寸的间隔元件,该间隔元件可以以这样的可控方式定位在与轴承元件相距一定距离的连接元件之间的位置:以使连接元件彼此之间假定一个期望的角位置,同时被支撑在间隔元件和轴承元件上。可以将根据该发明的许多齿轮机构放在一起以形成挠性接头或操纵臂。该系统没有中央球形或万向关节,并且致动器位于主负载路径中。
EP 2608313 A1涉及一种“天线指向系统”,用于相对于安装表面选择性地移动有效载荷,并且包括至少一个旋转致动器,该旋转致动器具有相对于安装在该表面上的固定部可移动的移动部。连接杆可移动地连接至移动部和有效载荷。挠性安装结构将有效载荷可移动地附接到安装表面。该系统具有传统的万向接头,但没有中央万向关节,并且致动器位于主负载路径中。
尽管已经开发了许多铰接指向系统,但是仍然需要提高获得位置和旋转轴线的定义的准确性。
发明内容
因此,本发明的目的是提供一种避免上述缺点的铰接机构和铰接指向系统。
本发明提供一种铰接机构,其包括第一球形接头、第二球形接头、第三球形接头、第一杆、第二杆和第三杆,其中,所述第一球形接头和所述第二球形接头通过所述第一杆连接,所述第一杆包括第一突出部;所述第一球形接头和所述第三球形接头通过所述第二杆连接,所述第二杆包括沿着与所述第一突出部突出的方向相反的方向突出的第二突出部;并且所述第二球形接头和所述第三球形接头通过所述第三杆连接,使得所述第一杆的纵向轴线Y和所述第二杆的纵向轴线X是垂直的。
本发明还提供了一种铰接指向系统,其包括:基底平台和相对于所述基底平台可移动的移动平台;连接所述基底平台和所述移动平台的两个铰接铰链装置,所述铰链装置的运动由致动器执行;并且本发明的铰接机构,其中,所述第一杆通过所述第一突出部附接至所述移动平台,并且所述第二杆通过所述第二突出部附接至所述基底平台。
通过铰接机构的配置,由两个点(球形接头的中心)定义旋转轴线,并且它们的定义没有不确定性,从而在旋转轴线的位置的理论和操作知识上都获得了更高的精度。
从以下几个实施例的详细描述中,本发明的其他特征和优点将变得清楚,这些实施例示出了与附图相关的本发明的目的。
附图说明
图1示出了本发明的铰接机构的透视图。
图2示出了本发明的铰接机构的平面图。
图3示出了本发明的铰接机构的仰视透视图。
图4是本发明的铰接指向系统的示意图。
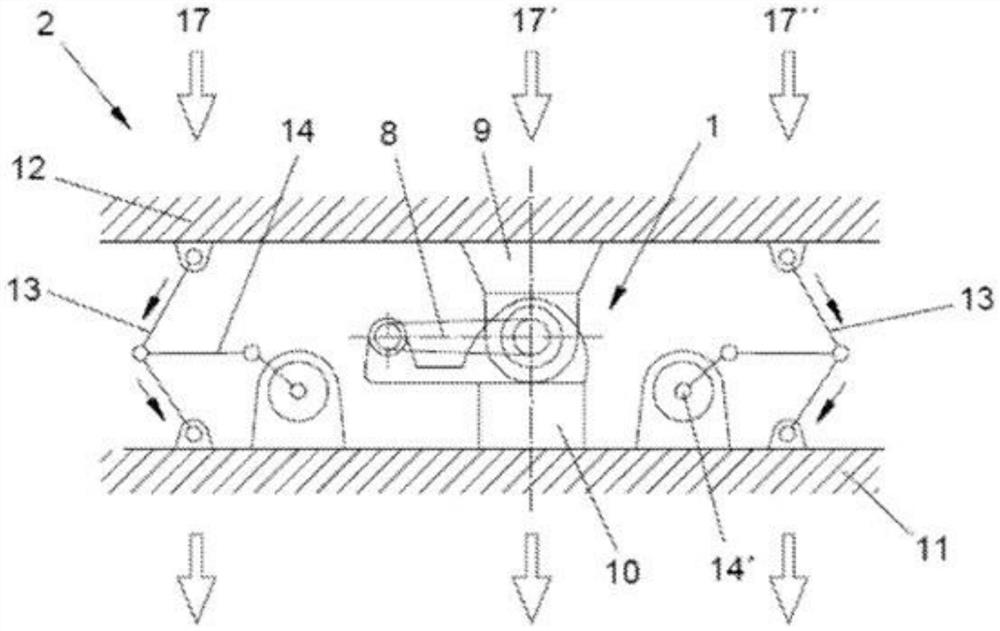
图5示出了具有主负载路径的本发明的铰接指向系统的示意性前视图。
图6和图7是示出本发明的铰接指向系统的致动器和铰链装置的视图。
具体实施方式
本发明的铰接机构1在图1至图3中示出。在这些图中,可以看出,铰接机构1包括第一球形接头3、第二球形接头4、第三球形接头5、第一杆6、第二杆7和第三杆8。第一球形接头3和第二球形接头4通过第一杆6连接,第一杆6包括适于附接到第一表面的第一突出部9。在图1和图2中,第一杆6的突出部9布置在与第一球形接头3相对应的第一杆6的端部。
第一球形接头3和第三球形接头5通过第二杆7连接,第二杆7包括适于附接到第二表面的第二突出部10。在图1和图3中,第二杆7的突出部10布置在与第一球形接头3相对应的第二杆7的端部。
在图1至图3中可以看出,第二球形接头4和第三球形接头5通过第三杆8以这样的方式连接:使得第一杆6的纵向轴线Y和第二杆7的纵向轴线X是垂直的。
第二突出部10沿着与第一突出部9突出的方向相反的方向突出。
在图1至图3所示的铰接机构1的实施例中,突出部9和10相对于第一球形接头3布置在相对的位置。在图3中,相对于第一球形接头3,第一突出部9处于上位,并且第二突出部10处于下位。
图4和图5示出了本发明的铰接指向系统2,其包括基底平台11和相对于基底平台11可移动的移动平台12。铰接指向系统2还包括两个铰接铰链装置13,该铰链装置13连接基底平台11和移动平台12,铰链装置13的运动由致动器14、14'执行。铰接指向系统2还包括上述类型的铰接机构1,其中第一杆6通过第一突出部9附接至移动平台12,并且第二杆7通过第二突出部9附接至基底平台11。
图4还显示了轴线X、Y、Z的正交系统(轴线X和Y已经被定义)。
如图4所示,铰接指向系统2具有基底平台11和相对于基底平台11可移动的移动平台12,因此它可以相对于基底平台11更改其定向和指向。相对定向的改变(例如,角度α)是通过相对于由铰接机构1构成的中央关节移动两个铰链装置13来执行。铰链装置13的移动是通过旋转致动器15或线性致动器16来执行。
通过移动致动器14,铰接铰链被移动,并且铰链的翼片在Z轴线线性运动中传递X轴线线性运动,上下移动移动平台12,并且绕Y轴线旋转平台。
如上所述,旋转轴线X和Y由球形接头定义:
-第一球形接头3和第二球形接头4通过第一杆6连接,轴线Y是第一杆6的纵向轴线。
-第一球形接头3和第三球形接头5通过第二杆7连接,轴线X是第二杆7的纵向轴线。
通过将第二球形接头4和第三球形接头5连接起来的杆8,确保了轴线X和Y的垂直和万向型移动。
中央关节的布置汇集了球形轴承接头的优点和万向型接头的优点。三个球形接头3、4、5定义了旋转轴线X、Y,并且它们之间的连接定义了耦合运动。一个轴线(Z)固定,另外两个轴线(X和Y)绕固定的轴线(Z)移动。通过围绕两个轴线(X,Y)的旋转,界面可以以任意方向放置。
图5还示出了当将负载(由箭头表示)施加在移动平台12上时发生的在移动平台12和基底平台11之间的三个负载路径17、17',17”。致动器14、14'布置在这些负载路径17、17',17”之外。这种布置提供了提高的输出分辨率(平台定向),使铰链13(结构元件)留在相应的负载路径17、17'中。该特征允许从负载能力的角度(可以使用相同的致动器来增加系统的负载能力而不增加质量)和从成本的角度(它允许从更大范围的致动器中选择致动器),对铰接指向系统2进行优化。
图6示出了具有线性致动器16的本发明的铰接指向系统2的铰链装置13。
图7示出了具有旋转致动器15的本发明的铰接指向系统2的铰链装置13。
旋转致动器15可以放置成其旋转轴线平行于基底平台11或垂直于基底平台11。线性致动器16平行于基底平台11放置。
尽管已经结合优选实施例对本发明进行了全面描述,但是显而易见的是,可以在其范围内引入修改,而不考虑这是受到这些实施例的限制,而是受所附权利要求的内容来限制。
- 铰接机构和包括所述机构的铰接指向系统
- 一种铰接机构以及含有该铰接机构的翻盖杯盖和翻盖杯