用于机动车辆转向系统的具有多极磁体的角度传感器
文献发布时间:2023-06-19 11:55:48
本发明涉及下述:具有权利要求1和权利要求11的前序部分的特征的角度传感器;机电式动力转向系统;以及具有相应的角度传感器的用于机动车辆的线控转向系统;以及具有权利要求17和权利要求20的前序部分的特征的用于确定机动车辆的可旋转安装的转向轴的旋转位置的旋转角度的方法。
角度传感器尤其在机动车辆中用于测量方向盘的转向角。当前使用的角度传感器为磁传感器,其测量可能很容易受到外部磁场的破坏。未来,机动车辆将完全电操作或部分电操作,并且在某种程度上已经是这样的情况,这可能由于传导高电流并且经常位于转向系统附近的电缆而引起高的外部场效应测量。因此,这种施加至磁传感器的干扰可能对转向系统的转向感觉和鲁棒性具有不利影响。
EP 2 552 000 A2公开了具有对以永久磁的方式体现的转子的漏磁场进行感测的转子位置传感器的电动马达,所述传感器根据漏磁场生成转子位置信号。因此,电动马达有利地不需要单独的转子位置磁体来感测转子的转子位置。另外,从公布的专利申请DE 102008 043 265 A1中另外已知的是,通过确定磁干扰场并且从磁场矢量中矢量地减去该磁干扰场来补偿由磁干扰场引起的干扰。
本发明要解决的问题是,提出一种具有提高的精度水平并且减小磁干扰场对旋转角度值的确定的现有影响的角度传感器。
该问题通过下述来解决:具有权利要求1和权利要求11的特征的角度传感器以及具有权利要求17和权利要求20的特征的用于确定机动车辆转向系统的电动马达的转子轴的旋转位置的旋转角度的方法。
因此,提供了一种角度传感器单元,其用于测量机动车辆的转向轴的旋转位置的旋转角度,该角度传感器单元具有:多极磁环,该多极磁环具有多个极对并且可以以抗扭矩的方式连接至转向轴;至少两个磁场传感器,所述至少两个磁场传感器被分配到多极磁环;以及评估单元,该评估单元被配置成基于至少两个磁场传感器的信号来确定旋转角度,其中,至少两个磁场传感器被布置成在多极磁环的外侧沿圆周方向偏移,以这样的方式使得源自所述多极磁环的磁场在两个磁场传感器的区域中具有近似相等的绝对值但是相反的符号。这种布置使得可以通过两个磁场传感器的差分测量来消除漏场干扰,并且因此确定无干扰的旋转角度。
两个传感器的敏感传感器面优选地在两个传感器之间的中心在相对于多极磁环的外面切向延伸的平面中。由多极磁环产生的磁场的矢量磁通量与传感器面的平面形成在绝对值方面相同的角度,即,|α|=|β|。外部磁干扰场在两个传感器的区域中优选地是均匀的。
磁场传感器沿所述圆周方向优选地间隔小于45°的距离,特别是小于20°的距离。
在一个有利实施方式中,磁场传感器被布置成沿圆周方向偏移一个极。这确保了干扰场在两个传感器的区域中是均匀的,并且可以借助于差分测量通过计算来消除。
磁场传感器的敏感传感器面优选地位于一个平面中并且间隔开在多极磁环的直径的40%至90%之间的范围中的距离。
多极磁环优选地具有至少四个极对。
评估单元优选地被配置成通过在两个磁场传感器的信号之间形成差而独立于外部磁干扰场来确定旋转角度。
为了确定一次旋转内的绝对角度,可以将具有分配的磁场传感器的两极磁环添加到该装置中。
多极磁环的极优选地由永磁体形成以及/或者磁场传感器为霍尔传感器或xMR传感器。
在另外的实施方式中,提供了一种角度传感器单元,其用于测量机动车辆的转向轴的旋转位置的旋转角度,该角度传感器单元具有:两个多极磁环,所述两个多极磁环具有相等数目的极对以及共同的对称轴并且可以以抗扭矩的方式连接至转向轴;两个磁场传感器,其中,在每种情况下,将一个磁场传感器分配到多极磁环;以及评估单元,该评估单元被配置成基于两个磁场传感器的信号来确定旋转角度,其中,多极磁环被布置成沿圆周方向相对于彼此偏移一个极,并且两个磁场传感器被布置成沿圆周方向在多极磁环的相应外侧上的相同位置并且沿轴向方向相对于彼此的短距离处。两个磁场传感器之间的距离以及在传感器的区域内形成的磁场被配置成使得可以通过测量差异来测量无干扰的旋转角度。两个多极磁环优选地是相同的,并且在轴向方向上一个多极磁环位于另一个多极磁环之后,优选地以邻接布置。
多极磁环优选地均具有轴向极宽度,并且磁场传感器之间的距离小于轴向极宽度的110%,特别地,大于90%。
优选的是磁场传感器之间的距离在两个多极磁环沿轴向方向的总范围的40%至60%之间。
此外,提供了一种用于机动车辆的机电式动力转向系统,该机电式动力转向系统包括:转向轴,该转向轴围绕转向轴旋转轴线枢转并且可以采用不同的旋转位置;电动马达,该电动马达用于辅助转向运动;以及如上面提及的角度传感器单元。
上面提及的角度传感器单元还可以在用于机动车辆的线控转向系统中使用,该线控转向系统具有:转向致动器,该转向致动器作用在转向轮上并且根据驾驶员的方向盘请求来进行电子调节;反馈致动器,该反馈致动器向方向盘传递对道路的反应;控制单元,该控制单元对反馈致动器和转向致动器进行控制。
此外,提供了一种用于使用角度传感器单元确定机动车辆的可旋转安装的转向轴的旋转位置的旋转角度的方法,该角度传感器单元具有:多极磁环,该多极磁环具有多个极对并且可以以抗扭矩的方式连接至转向轴;第一磁场传感器和第二磁场传感器,该第一磁场传感器和第二磁场传感器被分配到多极磁环;以及评估单元,该评估单元被配置成基于两个磁场传感器的信号来确定旋转角度,其中,两个磁场传感器被布置成在多极磁环的外侧沿圆周方向偏移,并且该方法包括下述步骤:
·将角度传感器单元引入磁干扰场中,
·将两个磁场传感器布置在多极磁环的外侧,以使得磁干扰场在两个磁场传感器的区域中近似均匀,并且使得源自该多极磁环的磁场在两个磁场传感器的区域中具有近似相等的绝对值但是相反的符号,
·借助于第一磁场传感器对磁场进行测量,
·借助于第二磁场传感器对磁场进行测量,
·将两个经测量的信号分解为径向分量和切向分量,
·在两个径向分量与两个切向分量之间形成差异,以及
·借助于反正切函数独立于外部磁干扰场来确定旋转角度。
这种反正切确定可以例如基于查找表、CORDIC算法(CORDIC=坐标旋转数字计算机)或类似的实现方式来实现。该方法提供了上面提及的优点。
优选地,可以在差异形成期间执行加权。
在一个优选示例性实施方式中,磁场传感器被布置成沿圆周方向偏移一个极。还可以从上面描述的装置中推断出另外的优选配置。
还可以规定,提供一种用于通过角度传感器单元确定机动车辆的可旋转安装的转向轴的旋转位置的旋转角度的方法,该角度传感器单元具有:两个多极磁环,所述两个多极磁环具有相等数目的极对以及共同的对称轴并且可以以抗扭矩的方式连接至转向轴;第一磁场传感器和第二磁场传感器,其中,在每种情况下,将一个磁场传感器分配到多极磁环;以及评估单元,该评估单元被配置成基于两个磁场传感器的信号来确定旋转角度,其中,该多极磁环被布置成沿圆周方向相对于彼此偏移一个极,并且两个磁场传感器被布置成沿圆周方向在多极磁环的相应外侧上的相同位置并且沿轴向方向相对于彼此的短距离处,并且该方法包括下述步骤:
·借助于第一磁场传感器对磁场进行测量,
·借助于第二磁场传感器对磁场进行测量,
·将两个经测量的信号分解为径向分量和切向分量,
·在两个径向分量与两个切向分量之间形成差异,以及
·借助于反正切函数独立于外部磁干扰场来确定旋转角度。
此处优选的是,多极磁环均具有轴向极宽度,并且磁场传感器之间的轴向距离小于轴向极宽度的110%,并且特别地,大于轴向极宽度的90%。磁场传感器之间的轴向距离在两个多极磁环沿轴向方向的总范围的40%至60%之间。还可以从上面描述的装置中推断出另外的优选配置。
下面参照附图更详细地说明本发明的优选实施方式。在所有附图中,相同的部件或功能相同的部件在此被设置有相同的附图标记。在附图中:
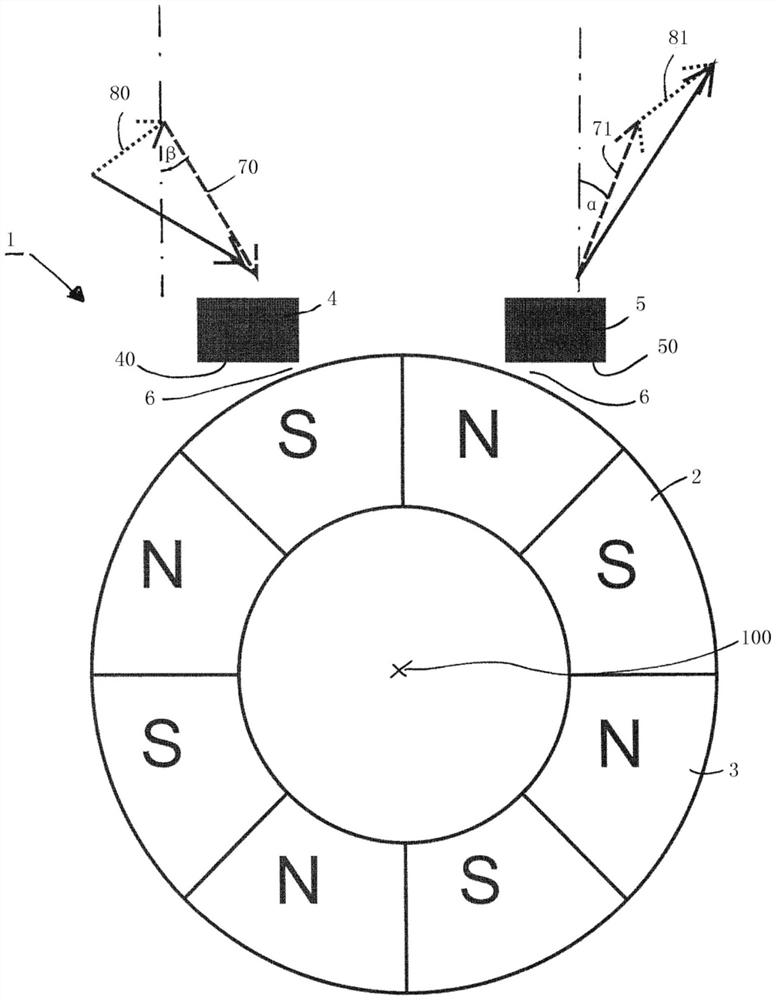
图1:示出根据本发明的具有两个传感器和多极磁环的转向角传感器的示意图,
图2:示出用于借助于图1中的转向角传感器来计算旋转角度的框图,
图3:示出根据本发明的具有两个传感器和两个多极磁环的转向角传感器的示意图,以及
图4:示出图3中的转向角传感器的电路图。
图1是转向角传感器单元1的示意性示出。多极磁环2同心地围绕轴(未示出),并且以抗扭矩的方式连接至该轴。多极磁环2沿其圆周具有多个永磁体。磁体3的布置以下述方式进行选择:使得北极和南极沿多极磁环2的外边缘交替地定位。因此,多极磁环2的旋转和轴的旋转产生磁场,该磁场随时间改变并且通过两个传感器4、5来感测。两个传感器4、5优选地为霍尔传感器。两个传感器4、5以位置固定的方式来布置。传感器4、5在多极磁环2的外侧并且被布置成与多极磁环2相对于纵轴100跨小气隙6在径向上间隔开,用于测量源自多极磁环2的磁场。两个传感器4、5被布置在沿围绕纵轴100的圆周方向的一个极的距离处。换句话说,第一传感器4面对南极,而第二传感器5面对与南极直接相邻的北极。因此,当存在X个极对时,传感器4、5在沿圆周方向的360°/(2*X)的距离处。
为了确定旋转角度,在评估单元中对两个传感器4、5的信号进行评估。为了能够在宽角范围内测量旋转角度,评估单元配备有增量计数器,使得当存在多极磁环2的相对较大的旋转时,可以对所生成的磁场强度的周期性波动的周期进行计数。因此,在旋转角度的初始的初始化之后,可以通过两个传感器4、5中的每个传感器以高精度对在从0°至360°的角度范围内的任何期望的旋转角度进行检测。
传感器沿圆周方向彼此靠近,使得可以假定外部磁干扰场在两个传感器的区域中是均匀的。两个传感器的敏感传感器面40、50在两个传感器4、5之间的中心相对于多极磁环2的外面切向延伸的平面中。由多极磁环2产生的磁场的矢量磁通量与传感器面40、50的平面形成在绝对值项方面相同的角度,即,|α|=|β|。在图1中由多极磁环在两个传感器面40、50的平面中产生的磁场被示出为虚线矢量70、71,其中,α为矢量71与到传感器面50的垂线构成的角度,而β为矢量70与到传感器面40的垂线构成的角度。通过传感器测量的外部干扰场80、81(点矢量)和所得的磁场90、91(实线)也被示出为矢量。如已经说明的那样,可以假定干扰场80、81针对两个传感器是相同的。
将两个传感器4、5的信号分解为切向分量41、51和径向分量41、51,如在图2中与旋转角度的确定有关的框图中示出的。在每种情况下,将两个传感器的径向信号分量和切向信号分量41、51、41、51相对于彼此以加权方式提取出61、72,以获得无干扰信号。在这样的上下文中,可以规定彼此独立地设置信号的延迟和偏移。如果将xMR技术用作传感器,则可以产生具有估计强度的完整矢量,使得可以基于额定通量密度来确定权重。
然后,借助于无干扰的径向分量和切向分量61、72使用反正切函数9来确定经校正的旋转角度10。另外,根据两个单独的传感器的信号来分别确定旋转角度11、12,以用于交叉检查13。与借助于单个传感器确定的两个旋转角度11、12相比,无干扰的旋转角度10此处偏移了半个极间隔。如果无干扰的经校正的旋转角度13在交叉检查中看起来是合理的,则将其传递至电动马达的马达控制器14。如果不是这种情况,则常规地确定的旋转角度11、12也可以用于马达控制器。在机电式动力转向系统的情况下,根据旋转角度来确定借助于电动马达提供的动力转向辅助。然而,也可以规定在线控转向系统中使用转向角传感器单元。
为了确定绝对转向角度,除了多极磁环之外还可以设置两极磁环。如描述的,通过两个传感器来扫描多极磁环的磁场,使得可以确定无干扰的旋转角度。为了完全可以在从0°至360°的整个测量范围内确定角度,通过第三传感器来感测附加的两极磁环的磁场。第三传感器被布置成直接邻近两极磁环的外面。两极磁环被布置成与多极磁环沿纵轴方向间隔开,使得磁场不会具有对彼此的破坏作用。
图3示出了转向角传感器单元1的另外的实施方式。设置了两个多极磁环2、20,其具有在圆周上均匀分布的相等数目的极对。此处,磁环2、20被布置成沿圆周方向相对于彼此偏移一个极,并且以其他方式相对于传感器100的纵轴彼此是一致的。每个磁环2、20产生单独的磁场,该磁场通过相应的传感器15、16来测量,优选地通过霍尔传感器来测量。此处,两个传感器15、16优选地定位成:其中,其传感器面在平行于传感器单元100的纵轴的平面中并且在每种情况下相对于对应的多极磁环2、20居中。图4示出了相应的转向角传感器单元的电路图。两个传感器15、16之间的距离较小,使得干扰场在两个传感器15、16的区域中是均匀的。由于在相应传感器2、20的敏感传感器面的区域内,由两个多极磁环产生的矢量磁场是平行的并且具有相反的方向,因此可以通过将两个信号相减来确定外部干扰场的干扰分量。为此,将两个传感器信号再次各自分为切向分量和径向分量。在简单的微控制器17中分别将这些分量彼此相减,并且使用反正切函数来计算无干扰的经校正的旋转角度。
- 用于机动车辆转向系统的具有多极磁体的角度传感器
- 用于机动车辆转向系统的具有两极磁体的角度传感器