适用于小型无人机的可伸缩机翼机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于无人机机翼设计领域,特别是一种适用于无人机的可伸缩机翼结构。
背景技术
无人机作战是未来无人化作战的重要组成部分,随着战场环境的进一步发展,无人机的作战任务将越发复杂。因此,无人机需要挂载更多的设备组件,并扩展其已有机构的功能,以满足实际需要。
为了使无人机适应各种飞行条件,调节无人机翼长是一条重要途径,其短翼长状态下可节约起降所需空间并提高自身隐蔽性,长翼长则可提高无人机的续航能力,二者结合可有效地提高无人机对复杂环境的适应性和综合性能。
就目前无人机机翼设计,普遍采用固定翼长的机翼设计,在此基础上搭配转轴机构使机翼可实现一小范围的转动,进而小幅度改变无人机机翼翼长;或者采用“弹簧刀”式设计,在无人机发射后机翼展开,但在无人机的后续飞行中无法进一步根据需要调节无人机翼长。
发明内容
本发明的目的在于提供一种适用于无人机的可伸缩机翼结构,以实现无人机飞行过程中的机翼翼长调节工作。
实现本发明目的的技术解决方案为:
一种适用于小型无人机的可伸缩机翼机构,采用内、外侧机翼相嵌套的方式构成可伸缩的机翼机构,以内侧机翼相对无人机机身固定,外侧机翼相对内侧机翼滑动的方式调节机翼翼长。
本发明与现有技术相比,其显著优点是:
(1)采用内外侧机翼嵌套设计,减小了无人机体积及其起飞时所需的空间,同时减轻了无人机重量,符合无人机轻量化的发展趋势。
(2)采用基于滚珠丝杠的传动机构,实现了在无人机飞行过程中对机翼翼长的可控调节,使无人机机翼可根据实际需要加长或缩短,以适应不同情况下的飞行任务。
(3)在外侧机翼外端设置副翼控制结构,解决了副翼控制与翼长控制机构间的干涉问题,整个设计布局均匀平衡,机翼可实现预期动作。
附图说明
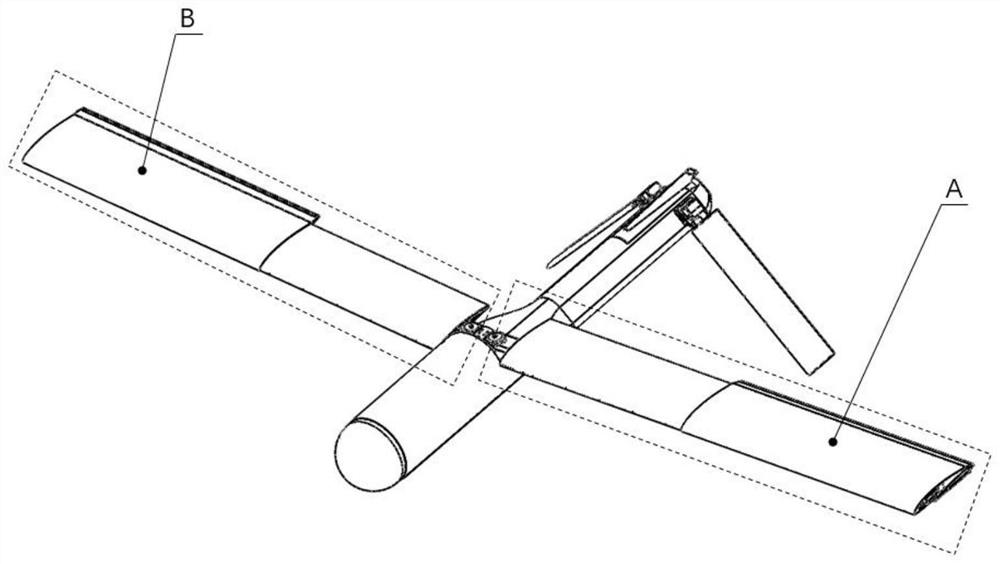
图1是可伸缩机翼与无人机机身安装示意图;
图2是左侧机翼整体示意图;
图3是内侧机翼内部结构示意图;
图4-图6是内侧机翼传动机构示意图;
图7是内侧机翼整体结构示意图;
图8是外侧机翼内部结构示意图;
图9是外侧机翼整体结构示意图;
图10-图12是内侧机翼与外侧机翼装配示意图;
图13是内侧机翼与转轴装配示意图;
图14-图15是左侧机翼收缩状态示意图;
图16-图17是左侧机翼完全展开状态示意图;
图18-图19是左侧机翼部分展开状态示意图;
图20-图21是副翼姿态调整示意图。
其中:A-左侧机翼B-右侧机翼Ⅰ-内侧机翼Ⅱ-外侧机翼Ⅲ-转轴1-内侧机翼翼肋2-U型前梁3-U型后梁4-内侧机翼翼梁5-碳管6-舵机7-套筒8-滚珠丝杠9-舵机侧轴承10-矩形导轨11-翼肋侧轴承12-内翼面13-外侧机翼翼肋14-外侧机翼翼梁15-滑杆组16-丝杠螺母17-副翼控制舵机、18-摆杆19-连杆20-舵脚21-副翼22-外翼面
具体实施方式
下面结合附图及具体实施例对本发明做进一步的介绍。
整套可调节机翼通过转轴Ⅲ固定在无人机机身上,各机构、零件可按照预定设计运动。各机构的相对位置关系如下:
整套可调节机翼由左侧机翼A和右侧机翼B组成,每侧机翼包括内侧机翼Ⅰ和外侧机翼Ⅱ,两侧机翼对称布置。
当机翼处于收缩状态时,丝杠螺母16位于滚珠丝杠8上最靠近舵机6位置,此时内侧机翼Ⅰ嵌套于外侧机翼Ⅱ内部,外机翼的翼梁14嵌套于内机翼翼梁4内部。
当机翼处于展开状态时,丝杠螺母16沿滚珠丝杠8向远离舵机6方向运动,此时外侧机翼Ⅱ一部分滑出内侧机翼Ⅰ,同时外机翼的翼梁14一部分滑出内机翼翼梁4。
左侧机翼A的各机构的组装、运动具体过程为:
结合图1-图7,内侧机翼A由一系列翼肋(1-1-1-11)、U型前梁2、U型后梁3、翼梁4、碳管5、舵机6、套筒7、滚珠丝杠8、舵机侧轴承9、矩形导轨10、翼肋侧轴承11、内翼面12组成。内翼面12包覆在翼肋上。多个翼肋按一定间隔排布,中间穿插U型前梁2、U型后梁3、翼梁4、碳管5作为支撑,碳管5的两个端面分别与最外侧的翼肋1-1和最内侧翼肋1-11外端面平齐。舵机6固定在翼肋1-2上,其输出轴通过套筒7与滚珠丝杠8固连,滚珠丝杆8与翼肋1-3间有舵机侧轴承9,与翼肋1-11间有翼肋侧轴承11。如此,当舵机6工作时,舵机的输出轴将带动滚珠丝杠8转动。滚珠丝杆8外套有矩形导轨10,矩形导轨10安装在系列翼肋上。
结合图8-图12,外侧机翼由翼肋13、翼梁14、滑杆组15、丝杠螺母16、副翼控制舵机17、摆杆18、连杆19、舵脚20、副翼21、外翼面22组成。外翼面22包覆在翼肋13上,副翼21通过转轴与外侧机翼的外翼面22连接,副翼21的边线与外翼面22的边线平齐。翼肋13穿插翼梁14和滑杆组15,翼肋13的外端面与翼梁14、滑杆组15的一侧外端面平齐。滑杆组15一端与外侧机翼的翼肋13固定,另一端设有丝杠螺母16,丝杠螺母16与滑杆组15固定连接。副翼控制舵机17固定在翼梁14内,副翼控制舵机17的输出轴与摆杆18固定,摆杆18通过转轴连接有连杆19,连杆19与舵脚20通过转轴相连,舵脚20与副翼21固定。
外侧机翼Ⅱ的翼梁14嵌套在内侧机翼Ⅰ的翼梁4内,外侧机翼Ⅱ的滑杆组15通过内侧机翼Ⅰ的翼肋1上的预制孔,外侧机翼Ⅱ的丝杠螺母16安装在内侧机翼Ⅰ的矩形导轨10内部,滑杆组嵌套在矩形导轨内,如此,丝杠螺母16可沿矩形导轨10移动,外侧机翼Ⅱ可相对内侧机翼Ⅰ平移。
结合图13,内侧机翼Ⅰ的翼梁4嵌套在转轴的支撑梁Ⅲ上,实现机翼A与机身的固定连接。
右侧机翼B的各机构的组装、运动具体过程与左侧机翼A完全相同。
组装完成的左侧机翼A如图2所示。
结合图14-19,当机翼处于收缩状态,需要增加翼长时,舵机6工作带动滚珠丝杠8正向转动,滚珠丝杠8上的丝杠螺母16受矩形导轨10的限制做平移运动,带动滑杆组15向外侧移动,推动翼肋13,使外侧机翼Ⅱ逐渐向外滑出,外侧机翼Ⅱ的翼梁14也随之从内测机翼Ⅰ的翼梁4上滑出,外侧机翼Ⅰ与内侧机翼Ⅱ嵌套部分减少。整个机翼翼长增加。
结合图20-21,当机翼需要减少翼长时,舵机6可带动滚珠丝杠8反向转动,滚珠丝杠8上的丝杠螺母16将沿矩形导轨10向内侧运动,带动滑杆组15向内侧移动,拉动翼肋13使外侧机翼Ⅱ逐渐向内滑动,外侧机翼Ⅱ的翼梁14也随之在内测机翼Ⅰ的翼梁4上滑动,外侧机翼Ⅱ与内侧机翼Ⅰ嵌套部分增加。整个机翼翼长减小。
当需要调节外侧机翼Ⅱ的副翼21角度时,外侧机翼Ⅱ上的副翼控制舵机17进行工作,使摆杆18产生小角度摆动,通过连杆19传动,调节舵脚20位置,使与舵脚20固连的副翼21绕边线进行摆动,实现对副翼21角度的调节。
- 适用于小型无人机的可伸缩机翼机构
- 一种适用于小型无人机长直机翼的静力测试加载方法